
Сообщение на тему планетоходы
Обновлено: 02.07.2024
Разработчики советского лунохода отошли от идеи “космического танка”, они создавали аппарата не похожий ни на что. Кастрюлеобразная форма с крышкой, открывающейся на шарнире — это дань эксплуатационным задачам. В этом случае получается при минимальной площади максимальный объем и достаточная прочность. Крышка представляет собой солнечную батарею, которая в закрытом состоянии обеспечивает теплоизоляцию приборному отсеку.
О терморегуляции разработчикам лунохода пришлось крепко подумать, так как имеющиеся приборы и аккумуляторы способны работать в узком диапазоне температур, Как их заставить работать, когда на Луне ночью “прохладно” — минус 173 градуса по Цельсию, и “довольно тепло” днем — +127? Конечно же нужно “утеплиться” с помощью теплоизоляции и иметь надежную “печку” и охлаждение. В верхней части планетохода установили радиатор охлаждения, а для обогрева — источник тепла с радиоизотопом полония, установленный вне корпуса.
Большую загадку представляла поверхность Луны, поэтому на этот счет существовало множество теорий. После волевого решения Сергей Королева приняли, что она твердая. Если грязи и болот на пути не будет, то и гусеницы не нужны — ведь колеса это проще. Однако проблема в реальных условиях появилась там, где ее не ждали — тормоза. Для замедления двигатели “Лунохода-1” работали в режиме торможения, а для фиксации на уклонах — дисковые тормоза, которые электромагнитный привод заблокировал до начала выполнения программы.
Для маневрирования использовалась разница скоростей вращения колес разных бортов. Был предусмотрен также задний ход. Всего колес было девять, восемь из которых были ведущие, а одно небольшое измеряет пройденное расстояние.
Серебряно-кадмиевые аккумуляторы в 200 А∙ч с зарядкой от солнечной батареи по емкости всего в 4 раза превышает обычные автомобильные. Тем не менее этого вполне достаточно для передвижения с низкой скоростью при постоянной подзарядке.
Принципиальная схема системы терморегулирования лунохода: 1 - воздуховоды холодного контура; 2 - воздуховод горячего контура; 3 - блок обогрева; 4 - экран блока обогрева; 5 - заслонки блока обогрева; 6 - управление заслонками блока обогрева; 7 - дроссельная заслонка; 8 - заслонка; 9 - соединительный чехол; 10 - трехступенчатый вентилятор; 11 - коллектор; 12 - привод заслонки; 13 - шаговый механизм; 14 - пружинная тяга; 15 - кулачковый механизм; 16 - датчик угловых перемещений; 17, 18 - чувствительные элементы; 19 - радиатор-охладитель; 20 - коллектор системы обдува блока обогрева; 21 - топливный элемент.
Принципиальная схема системы терморегулирования лунохода: 1 - воздуховоды холодного контура; 2 - воздуховод горячего контура; 3 - блок обогрева; 4 - экран блока обогрева; 5 - заслонки блока обогрева; 6 - управление заслонками блока обогрева; 7 - дроссельная заслонка; 8 - заслонка; 9 - соединительный чехол; 10 - трехступенчатый вентилятор; 11 - коллектор; 12 - привод заслонки; 13 - шаговый механизм; 14 - пружинная тяга; 15 - кулачковый механизм; 16 - датчик угловых перемещений; 17, 18 - чувствительные элементы; 19 - радиатор-охладитель; 20 - коллектор системы обдува блока обогрева; 21 - топливный элемент.
Где только не тестировали луноход — и на крымском лунодроме под Симферополем, и на Камчатке неподалеку с вулканами Шивелуч и Толбачик после недавнего извержения. При испытаниях создавались условия, максимально приближенные к лунным. Правда, управление осуществлялось по кабелю.
19 февраля 1969 года первый “Луноход” отправился на Луну, но… не долетел. После неудачного старта на 52-й секунде разрушился носовой обтекатель и произошел взрыв ракеты “Протон”. Луноход, который находился на его борту считают нулевым. Первым числится тот, который был доставлен на Луну в рамках миссии станции “Луна-17”.

Планетоход — это космический аппарат, предназначенный для передвижения по поверхности другой планеты или небесного тела. Некоторые планетоходы были сконструированы для перемещения членов экипажа космической экспедиции; другие были исследовательскими аппаратами — дистанционно управляемыми роботами.
![MER_Spirit_Lander_Pan_Sol16-A18R1_br2[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/MER_Spirit_Lander_Pan_Sol16-A18R1_br21.jpg)
Посадочный модуль, доставивший планетоход Спирит на Марс
Планетоходы доставляются на поверхность исследуемого небесного тела при помощи посадочных модулей, которые могут являться как самостоятельными космическими аппаратами, так и отделяемыми спускаемыми аппаратами.
Все когда-либо использовавшиеся в космосе планетоходы были либо исследовательскими, либо транспортными.
Исследовательские планетоходы предназначены для проведения научных исследований небесного тела. Такие планетоходы могут быть дистанционно управляемыми или частично автономными или полностью автономными.
Транспортные планетоходы предназначены для перемещения космонавтов и грузов. Такие планетоходы с экипажем на борту управляются непосредственно космонавтами или являются дистанционно управляемыми или частично автономными или полностью автономными.
В будущем возможно также использование планетоходов для проведения строительных работ, как передвижных ретрансляторов и передвижных убежищ.
Кроме того, подобные планетоходам дистанционно управляемые аппараты могут использоваться на Земле для выполнения работы, опасной для людей — например, при разминировании или в условиях высокой радиоактивности.
Планетоходы обладают несколькими преимуществами перед неподвижными аппаратами: они обследуют бо́льшую территорию, могут уже в процессе работы направляться для исследования заинтересовавших учёных объектов, способны менять положение относительно Солнца, чтобы эффективно использовать солнечные батареи в зимний период. Кроме того, подобные аппараты вносят вклад в развитие систем дистанционного управления подвижными роботами.
Преимущества перед орбитальными аппаратами — это способность проводить исследования объектов размером вплоть до микроскопического и выполнять эксперименты. Недостатками по сравнению с орбитальными аппаратами является более высокая вероятность неудачи миссии, вследствие сложности посадки или других проблем и ограниченность исследуемой площади районом места приземления (который может быть задан лишь приблизительно).
Планетоходы доставляются на объект исследования космическими кораблями и работают в условиях, сильно отличающихся от земных. Это вызывает некоторые специфические требования к их устройству.
Планетоход должен обладать стойкостью к перегрузкам, низким и высоким температурам, давлению, пылевому загрязнению, химической коррозии, космическому излучению, сохраняя работоспособность без ремонтных работ в течение необходимого для выполнения исследований времени.
Планетоходы (и другие аппараты), находящиеся на небесных телах, значительно удаленных от Земли, не могут управляться в режиме реального времени из-за значительной временной задержки приёма отправленных команд управления и сигналов обратной связи от аппарата. Задержка возникает, поскольку радиосигналу требуется время, чтобы дойти до удаленной планеты или от неё до Земли. Поэтому такие планетоходы способны некоторое время функционировать, в том числе передвигаться и выполнять исследования, автономно благодаря заложенному в них программному обеспечению, получая команды лишь время от времени.
Время (1,28 секунды), за которое радиоволна, пущенная с Земли, достигает Луны. Рисунок выполнен в масштабе.
Первый планетоход, Луноход-1, был доставлен на поверхность Луны 17 ноября 1970 года автоматической межпланетной станцией Луна-17. Предназначался для изучения особенностей лунной поверхности, радиоактивного и рентгеновского космического излучения на Луне, химического состава и свойств грунта. Успешно проработал до 14 сентября 1971 года, после чего вышел из строя. За время нахождения на поверхности Луны проехал 10 540 м, передал на Землю 211 лунных панорам и 25 тысяч фотографий. Более чем в 500 точках по трассе движения изучались физико-механические свойства поверхностного слоя грунта, а в 25 точках проведён анализ его химического состава.
![1024px-Apollo15LunarRover[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/1024px-Apollo15LunarRover1.jpg)
Второй советский лунный дистанционно-управляемый вездеход был доставлен на поверхность Луны 16 января 1973 года автоматической межпланетной станцией Луна-21. Он был предназначен для изучения механических свойств лунной поверхности, фотосъёмки и телесъёмки Луны, проведения экспериментов с наземным лазерным дальномером, наблюдений за солнечным излучением и других исследований. Аппарат проработал около четырёх месяцев, за это время было проведено 60 сеансов радиосвязи, получено 86 панорам и более 80 тысяч телевизионных снимков лунной поверхности. Были также получены стереоскопические изображения наиболее интересных особенностей лунного рельефа, позволившие провести детальное изучение его строения. В последний раз телеметрическая информация от аппарата была принята 10 мая 1973 года.
Прибор оценки проходимости — Марс (ПрОП-М) — название советских марсоходов. Идентичные марсоходы входили в состав автоматических марсианских станций которые должны были быть доставлены на поверхность Марса в 1971 году спускаемыми аппаратами автоматических межпланетных станций Марс. Спускаемый аппарат Марс-2 разбился 27 ноября 1971 при неудачной попытке мягкой посадки. Спускаемый аппарат Марс-3 совершил мягкую посадку 2 декабря 1971, но сигнал с самой марсианской станции, к которой был подключен по кабелю марсоход, пропал через 14,5 секунд. Информация с марсохода не была получена.
![Pathfinder01[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/Pathfinder011.jpg)
Марсоход Sojourner исследует камень на Марсе
![800px-NASA_Mars_Rover[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/800px-NASA_Mars_Rover1.jpg)
Рисунок марсохода Спирит или Оппортьюнити
![1024px-MSL_concept_February_2007_-_PIA09201[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/1024px-MSL_concept_February_2007_-_PIA092011.jpg)
Рисунок марсохода Кьюриосити
Mars Science Laboratory — миссия НАСА по доставке на Марс и эксплуатации марсохода третьего поколения Кьюриосити (рус. Любопытство/Любознательность), представляющего собой автономную химическую лабораторию в несколько раз больше и тяжелее предшественников. Аппарат должен будет за несколько месяцев пройти от 5 до 20 километров и провести полноценный анализ марсианских почв и компонентов атмосферы. Запуск Кьюриосити к Марсу состоялся 26 ноября 2011 года, мягкая посадка на поверхность Марса — 6 августа 2012. Предполагаемый срок службы на Марсе — 1 марсианский год (686 земных суток). Вместо традиционных для планетоходов солнечных батарей в качестве источника энергии будет использоваться радиоизотопный термоэлектрический генератор.
В рамках экспедиции Чандраян-2 планируется использование шестиколесного лунохода весом 58 кг, оснащённого солнечными батареями, для изучения района южного полюса Луны в течение одного года.
![1024px-Lunar_Electric_Rover_2008_desert_testing[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/1024px-Lunar_Electric_Rover_2008_desert_testing1.jpg)
Lunar Electric Rover — транспортный луноход размером с грузовик
Lunar Electric Rover — транспортный луноход размером с грузовик. Небольшой вездеход с 6 ведущими колёсными осями. Аппарат работает от аккумуляторов, позволяющих в условиях лунной гравитации и поверхности развивать ему скорость до 10 км/час. В герметичной кабине устроены места для двух астронавтов и небольшой отсек для грузов.
![1920px-ATHLETE_(robot)[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/1920px-ATHLETE_robot1.jpg)
Луноход ATHLETE в тестовой лаборатории JPL. Август 2008 года
![800px-Lunokhod-3_side[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/800px-Lunokhod-3_side1.jpg)
Луноход-3 в музее
Третий советский аппарат из серии Луноход планировалось доставить на Луну в 1977 году при помощи межпланетной станции Луна-25, но её запуск не состоялся. Впоследствии Луноход-3 так и не был отправлен на Луну. В настоящее время он находится в музее НПО имени Лавочкина.
![220px-Venus_Rover[1]](https://aboutspacejornal.net/wp-content/uploads/2016/02/220px-Venus_Rover1.jpg)
И какие аппараты в будущем будут двигаться по поверхности планет и их спутников.
За десятилетия космической гонки учёные создали разные варианты аппаратов для исследования других планет. Самыми эффективными оказались разработки на основе колеса, а в будущем появятся устройства, способные летать в условиях разреженной атмосферы и нырять в подлёдный океан. Инженер космической отрасли и автор научно-популярного блога Science & Future в Яндекс.Дзене Денис Юшин объясняет, зачем нужны планетоходы и что их отличает от земных машин.
Зачем нужны планетоходы
Планетоход — это транспортное средство, предназначенное для передвижения по поверхности других планет, спутников или астероидов. Такие аппараты должны выдерживать перегрузки, существенные перепады температур и воздействие космической радиации, сохраняя работоспособность на протяжении всего срока эксплуатации. Кроме того, ограниченный объем пространства под обтекателем ракеты-носителя накладывает дополнительные ограничения на аппараты — они должны быть максимально компактными.
Планетоходы позволяют исследователям получать важнейшие научные сведения. Так, аппараты Spirit и Opportunity подтвердили существование в прошлом на Марсе жидкой воды. Один из приборов новой американской миссии Perseverance попробует производить кислород из марсианской атмосферы — это поможет понять, пригодна ли Красная планета к колонизации.
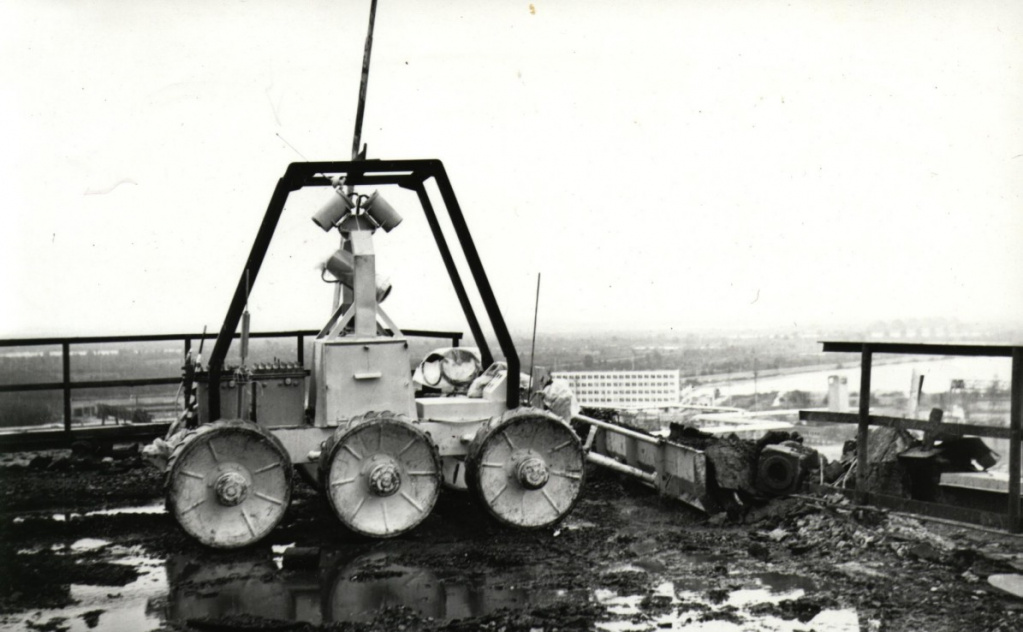
Робот СТР-1 использовался для уборки радиоактивных обломков с крыши Чернобыльской АЭС. Фото: Science & Technology Rover Co. (ВНИИТМ).
Марсианские лыжи
Инженеры под руководством Кемурджиана выбрали такой нетривиальный способ передвижения, поскольку точных сведений о поверхности Марса ещё не было, а лыжи позволяли увеличить площади опоры. К сожалению, сигнал со станции пропал через 14,5 секунд после мягкой посадки, поэтому лыжня на Красной планете так и не появилась.
Марс вообще мог бы стать прекрасным полем для экспериментов. Когда-то инженеры рассматривали возможность отправлять туда аппараты на гусеничном шасси — от этой идеи отказались, потому что существовал высокий риск повреждений гусениц, которые привели бы к прекращению миссии.
Постепенно учёные поняли, что почти все объекты Солнечной системы, доступные сейчас для исследования, обладают твёрдой поверхностью с обширными равнинными участками. Ни растительности, ни болот — только твёрдый грунт.
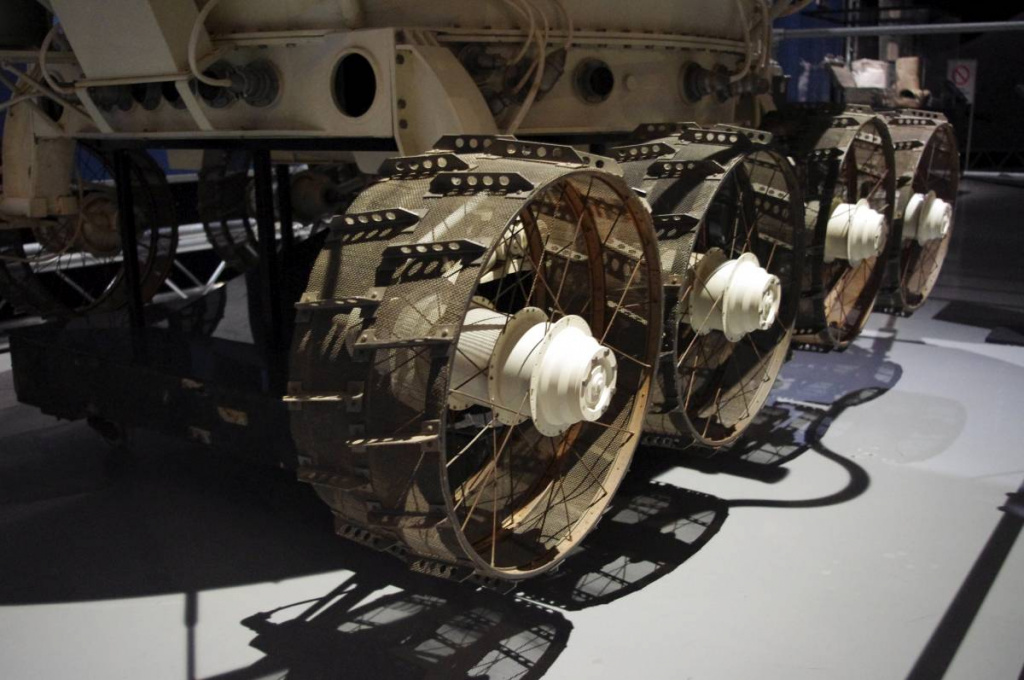
Грунтозацепы и сетка на колёсах модели советского лунохода. Фото: liftarn/Wikimedia Commons.
Сегодня чаще всего планетоходы оборудуют мотор-колёсами — специальными агрегатами, которые содержат все необходимые датчики, электромотор, редуктор и тормоз. Обычно таких сложных колёс шесть — это позволяет снизить нагрузку на грунт и продолжить миссию после поломок одного из движителей.
Со временем стало понятно, что сетка плохо подходит для планет с относительно большой гравитацией (например, Марса), так как она быстро разрушается. В итоге просторы Красной планеты бороздят машины на колесах со сплошной поверхностью и грунтозацепами.
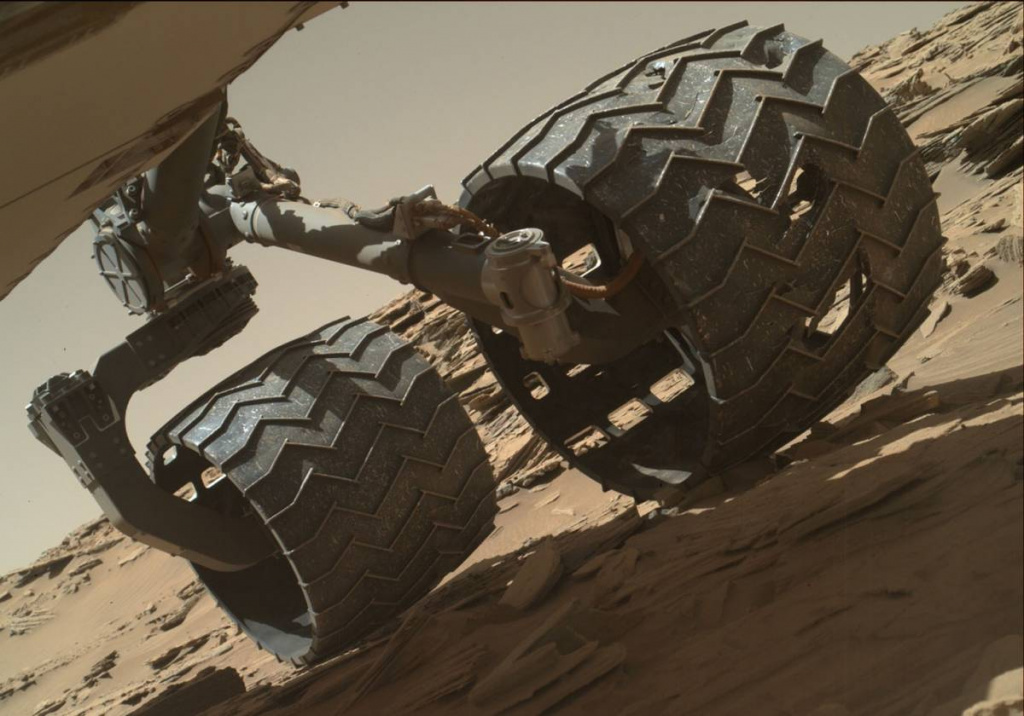
Колёса марсохода Curiosity, снятые собственной камерой MAHLI в 2016 году. На одном из колёс заметны характерные повреждения от марсианских камней. Фото: NASA/JPL-Caltech/MSSS.
Планетоходы будущего
Прямо сейчас к Марсу летят сразу два новых планетохода — американский и китайский. Их шасси практически не отличается от знаменитого марсохода Curiosity — шесть мотор-колёс с независимой подвеской. Эти аппараты будут анализировать химический и минералогический составы марсианского грунта, а также искать органические соединения и пытаться найти следы жизни, если она когда-либо там была.
Интересно, что с американской миссии начнётся изучение нового способа перемещения на других планетах — по воздуху. В её состав включён прототип первого марсианского вертолёта. Сложностей там не меньше, чем при езде по поверхности. Плотность атмосферы на Красной планете составляет лишь около одного процента от земной. Этот недостаток частично компенсируется тем, что гравитация на Марсе в три раза меньше, чем на Земле. Скоро мы узнаем, может ли в принципе функционировать марсианский вертолёт.
Есть в Солнечной системе объекты, для изучения которых придется нырять в жидкую среду. В NASA уже испытали прототип аппарата для изучения подлёдного океана спутника Юпитера Европы — устройство получило название Buoyant Rover. А аппарат EurEx (Europa Explorer), который разрабатывают в Германии, будет способен погружаться на глубину около 100 километров.
Планетоходы – это аппараты, которые могут самостоятельно передвигаться по поверхности других планет. Некоторые из существующих планетоходов сделаны для того, чтобы перевозить участников космической экспедиции, другие являются исследовательскими аппаратами, которые управляются дистанционно.

Луноход-1
Разработкой средства передвижения на других планетах начал заниматься Королёв ещё в начале 60-х годов. Было создано множество самых разных конструкций, но самой эффективной оказались гусеничная и колёсная. Поэтому для создания шасси обратились к тракторному заводу – ленинградскому ВНИИТрансмаш. В рамках этой программы был разработан целый парк внеземных машин различного назначения. И после многих лет исследования была представлена конструкция, которая отвечала всем требованиям – достаточно лёгкая, чтобы её можно было доставить на Луну, прочная, и способная передвигаться даже на очень неровной местности.
Это первый успешный планетоход в истории космонавтики. Он был доставлен на Луну 17 ноября 1970 года. Управление Луноходом-1 выполнялось удалённо с Земли.
Луноход-1 вышел из строя 14 сентября 1971 года. Всё время своего пребывания он работал бесперебойно, сделал и передал операторам около 25 тысяч фотографий. При этом аппарат проехал больше 10 км (для сравнения, марсоходу Opportunity для прохождения такого расстояния понадобилось около шести лет).
Конструкция Лунохода до сих пор признаётся специалистами идеальной для исследования других планет.
Лунный автомобиль
Планетоход, разработанный компанией Boeing, позволил увеличить доступную астронавтам для исследования площадь. Люди в скафандрах могли перемещаться по Луне только пешком около места посадки. На таком луноходе они могли достигать скорости до 13 км/ч.
Луноход был, по сути, двухместным электромобилем с питанием от двух батарей (без возможности подзарядки). Управлялся он командиром экипажа.
Этот аппарат стал первым в истории космонавтики средством передвижения, который управлялся не удалённо, а на месте.
ПрОП-М
Советский Союз обращал внимание не только на лунную программу. Интерес вызывало и освоение Марса – для создания марсохода привлекались лучшие инженеры. Главным конструктором, как и при создании Лунохода-1, был Александр Леонович Кемурджиан, и изготовление происходило на ВНИИТрансмаш. В результате тщательных исследований был создан Прибор Оценки Проходимости Марса – ПрОП-М.
Из-за того, что о поверхности Марса не было ничего известно, его создали абсолютным вездеходом. Аппарат был протестирован на разных полигонах и мог перемещаться в любых условиях. Он двигался по грунту с помощью двух лыж, расположенных на боках и приподнимающих корпус над поверхностью.
Эти аппараты были первыми в истории советской космонавтики (да и мировой тоже) планетоходами на поверхности Марса. К сожалению, получить с них данные так и не удалось – первый аппарат Марс-2 разбился во время неудачной посадки. Второму – Марс-3 – удалось успешно приземлиться (2 декабря 1971 год), но после того, как станция, которая должна была запустить планетоход, приземлилась, с ней была потеряна связь. Причины этого до сих пор не установлены.
Sojourner
Основной задачей всего проекта была отработка запуска и посадки. Дополнительно к этому ожидалось проведение исследований поверхности, изучение атмосферы и пород Марса с помощью встроенного спектрометра и, конечно, получение фотографий.
В создании Соджорнера была использована конструкция с шестью колёсами, которая показала свою эффективность ещё со времени Лунохода. Питание осуществлялось с помощью солнечных батарей – это обеспечивало планетоходу большую мобильность и свободу передвижений.
Посадка планетохода на поверхность Марса произошла 4 июля 1997 года. За 83 дня работы Соджорнер прошёл около 100 м и передал 550 снимков.
ATHLETE
Выше описывались планетоходы из истории космонавтики, но стоит обратить внимание и на будущее. NASA постоянно работает над усовершенствованием технологий исследования космоса. С 2009 года в Калифорнийском технологическом институте идёт разработка All-Terrain Hex-Legged Extra-Terrestrial Explorer – шестиногого транспортного вездехода.
Этот ровер предназначается для экспедиции на Луну и, в дальнейшем, на Марс. По предварительным расчётам его грузоподъёмность составит 450 кг, и он сможет транспортировать грузы, жилые и лабораторные модули по сильно пересечённой поверхности.
Сейчас на Марсе и его спутниках работают несколько планетоходов, но человечество на этом не останавливается. В передовых институтах ведутся постоянные разработки внеземных аппаратов, и можно надеяться на то, что технологии будущего помогут нам освоить ближние и дальние планеты и спутники.
Читайте также: