
Синхронный реактивный двигатель реферат
Обновлено: 02.07.2024
Исключительное значение электротехники в наши дни объясняется тем, что средствами электротехники относительно просто решаются важнейшие технические проблемы в во всех отраслях (промышленности, быту, транспорте, передачи информации, медицине и т.д.) например передача на дальние расстояния и преобразование больших количеств энергии и передача сигналов на практически неограниченные расстояния.
Электротехническая промышленность выпускает в год миллионы электрических машин для всех отраслей народного хозяйства. И конечно же от специалистов в области электромеханики требуются глубокие знания обслуживания и ремонта электрических машин, а также их правильной эксплуатации. Без электрических машин не может развиваться ни одна комплексная научная программа. Электрические машины работают в космосе и глубоко под землей, в океане и активной зоне атомных реакторов, в животноводческих помещениях и медицинских кабинетах. Без преувеличения можно сказать, что электромеханика определяет технический прогресс в большинстве основных отраслей промышленности.
Прогресс в развитии электромашиностроения зависит от успехов в области теории электрических машин. Глубокое понимание процессов электромеханического преобразования энергии необходимо не только инженерам-электромеханикам, создающим и эксплуатирующим электрические машины, но и многим специалистам, деятельность которых связана с электромеханикой.
Возникновение электротехники как прикладной науке предшествовал довольно длительный период (начиная примерно с 16 века) накопления знаний об электричестве и магнетизма.
Начало практическому примеру электрического освещения положило изобретение в 1876 году П.Н. Яблочковым электрической свечи. Им же впервые был внедрен в практику переменный ток, осуществлено “дробление” электрической энергии посредствам трансформаторов с централизованного производства и распределения электроэнергии.
Работы М.О. Даливо–Добровольского, который изобрел трехфазный трансформатор и асинхронный двигатель (1889-1891 г.) и детально разработавшего технику трехфазной системы, которая по сегодняшний день остается основным способом передачи и распределения электроэнергии на всем земном шаре.
Электроэнергия является стержнем строительства экономики современного общества, играет ведущую роль в развитии всех отраслей народного хозяйства, в осуществлении всего технического процесса.
В настоящее время перед электромеханиками стоят трудные и интересные проблемы, которые требуют глубокого знания теории, проектирования и технологии изготовления электрических машин.
1. СИНХРОННЫЙ ДВИГАТЕЛЬ
Синхронные двигатели имеют постоянную частоту вращения, и используется там, где нет необходимости в регулировании частоты или она должна быть постоянной. Синхронные двигатели имеют большую мощность (50–100 кВт и более) и применяется на металлургических заводах, в шахтах и других предприятиях для приведения в движение насосов, компрессоров и т.д. Достоинством синхронного двигателя является возможность его работы с емкостным (опережающим) током статора. Такой двигатель будет улучшать коэффициент мощности предприятия
Имеется также специальные синхронные микродвигатели мощностью от долей ватта до нескольких десятков ватт, используемые в схемах автоматики, звукозаписи, для вращения лент самопищущих приборов и в других случаях, требующих строгого постоянства частоты вращения.
Синхронная машина, работающая в режиме генератора или двигателя, может служить источником реактивной мощности.
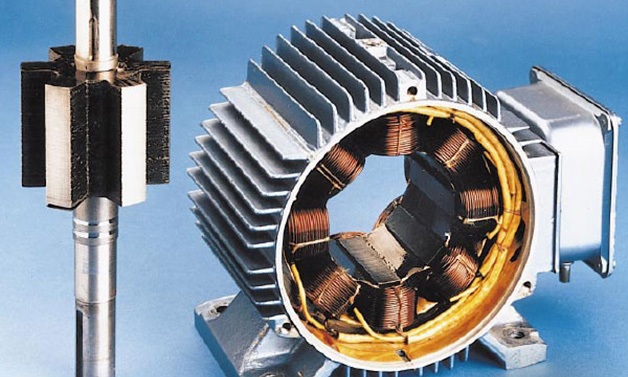
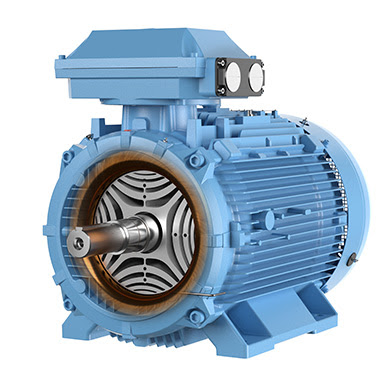
Синхронный двигатель состоит из неподвижного статора и вращающегося ротора. В пазах статора размещена обмотка переменного тока, получающая питание от сети, а в роторе – обмотка постоянного тока.
В зависимости от мощности двигателя ротор выполняют с различной системой возбуждения. Синхронные двигатели средней и большой мощности выполняют с электромагнитным возбуждением. В этом случае расположенная на роторе обмотка возбуждения получает питание от источника постоянного тока через контактные кольца. Для двигателей малой мощности применяют постоянные магниты без обмотки возбуждения, что упрощает конструкцию ротора и повышает надежность двигателей.
Рис.1 Устройство синхронного двигателя небольшой мощности:
1 – корпус; 2 – сердечник статора; 3 – обмотка статора; 4– ротор;
5 – вентилятор; 6 – выводы обмотки статора; 7 – контактные кольца;
8 – щетки; 9 – возбудитель.
Ротор синхронных двигателей выполняют с явновыраженными и неявновыраженными полюсами.
Явнополюсные, то есть с ровно выраженными полюсами, при котором каждый полюс выполняют в виде отдельного узла, состоящего из сердечника, полюсного наконечника и полюсной катушки. Все полюса закрепляют на ободе, являющимся также и ярмом, через которые закрепляются магнитные патоки полюсов. Сердечники полюсов явнополюсного ротора обычно собирают из штамповой листовой конструкционной стали толщиной 1 - 1,5 мм. Обод явнополюсного ротора выполняют массивным (литым или сварным) или же шлихтованным из листов конструкционной стали 1-6 мм. Листы стягивают шпильками.

Рис.2 Явнополюсной ротор.
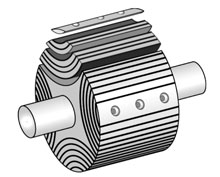
Неявнополюсной ротор имеет вид удлиненного стального цилиндра. Сердечник неявнополюсного ротора изготовляют в виде цельной стальной поковки в месте с хвостовиками или же делают сборными. Обмотки возбуждения неявнополюсного ротора занимает лишь две трети его поверхности (по периметру). Оставшееся одна треть внутренности двигателя остается для ротора. Для защиты лобовых частей обмотки ротора от разрушения действием центробежных сил ротор с двух сторон прикрывает стальными бандажными кольцами (каплями) изготовленными обычно из немагнитной стали.

Рис.3 Неявнополюсной ротор.
2. ПРИНЦИП ДЕЙСТВИЯ СИНХРОННОГО ДВИГАТЕЛЯ
Оболочка статора синхронного двигателя подключается к сети переменного тока, а оболочка ротора к источнику постоянного тока. В синхронном двигателе момент на валу создается благодаря взаимодействию вращающегося магнитного поля статора и постоянного поля ротора. В отличие от асинхронного двигателя частота вращения ротора в синхронном двигателе не зависит от нагрузки и равна частоте вращения поля статора. Если ротор двигателя начнет вращаться с частотой, меньшей, чем частота поля статора, то в какой-то момент времени намагниченные полюса ротора расположатся против одноименных полюсов вращающегося поля статора. В этом случае нарушится связь между полюсами статора и ротора из-за их взаимного отталкивания.

Появление электрического двигателя во многом способствовало развитию промышленности и улучшению качества жизни населения. В рамках второй промышленной революции произошла популяризация всех видов электрических машин, и теперь для многих создается впечатление, что эти устройства всегда находились на службе у человечества. На сегодняшний день известно множество разновидностей электрических двигателей, от широко известных двигателей постоянного тока (ДПТ), асинхронных двигателей (АД), синхронных двигателей (СД) до шаговых двигателей (ШД). Несмотря на глобальные различные, все они выполняют одну функцию – являются электромеханическими преобразователями, то есть конвертируют электрическую энергию в механическую.
А теперь представьте себе электрический двигатель с максимально простой конструкцией ротора. Это сделать довольно-таки сложно из-за сложившихся стереотипов о функционировании электрической машины, но именно так можно вкратце описать набирающие популярность Синхронные Реактивные Двигатели (с англ. Synchronous Reluctance Machine, СРД). В последнее время на эти электрические машины все больше обращают внимание производители двигателей, а также инжиниринговые компании по всему миру, и не случайно. Давайте разберемся, что же из себя представляют СРД.
Синхронный Реактивный Электродвигатель – синхронная машина, вращающий момент которой обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов – такое определение дает ГОСТ 27471-87.
Принцип работы синхронного реактивного двигателя
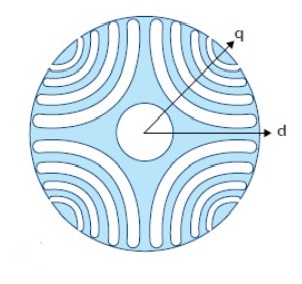
Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается когда ротор пытается установить свою наиболее магнито - проводящую ось (d-ось) с приложенным к нему полем, чтобы минимизировать сопротивление в магнитной цепи. Иными словами, вращающееся магнитное поле статора увлекает за собой ротор. Амплитуда потока статора управляется через ось d, тогда как ток, отвечающий за момент управляется через ось q. Оси приведены к статору двигателя.

В рассмотренном исполнении ротора разницы между магнитными сопротивлениями осей добиваются за счет увеличения воздушного зазора по оси q. Амплитуда момента прямо пропорциональна разнице между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент. Математически это можно выразить с некоторыми допущениями, рассмотрев формулу электромагнитного момента для синхронной явнополюсной машины без возбуждения на роторе:
Мр = [mU 2 /(2ω1 )] (1/Хq - 1/Хd ) sin 2θ,
Таким образом, в отличие от синхронной машины с обмоткой возбуждения, синхронная реактивная машина в классическом представлении имела меньший момент, а также невысокий коэффициент мощности и коэффициент полезного действия (КПД). Объяснялось это значительным намагничивающим током статора, так как возбуждение происходит за счет реактивной составляющей тока. Пуск таких двигателей осуществлялся за счет демпфирующей короткозамкнутой обмотки, т.е. имел место асинхронный пуск синхронного двигателя. Но на сегодняшний день, СРД успешно эксплуатируются в комплекте с преобразователями частоты (ПЧ) YASKAWA GA700 и ПЧ GA500. Пуск происходит благодаря алгоритму, заложенному в ПЧ (управление током намагничивания id статора и током статора, отвечающим за момент iq), следовательно, необходимость асинхронного пуска устраняется. В итоге, коэффициент мощности и КПД у современных СРД заметно увеличился, а конструкция ротора стала максимально простой. В среднем у синхронных реактивных двигателей остается худший коэффициент мощности на 5-10% из-за принципиальных особенностей работы, но на 5- 8 % лучший КПД в сравнении с асинхронными двигателями как в номинальном режиме, так и при работе на всем диапазоне скоростей при регулировании скорости вниз от номинала.
Наибольший интерес у разработчиков систем электропривода вызвала конструкция СРД. Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой. То есть, статор двигателя идентичен статору широко используемого асинхронного двигателя.
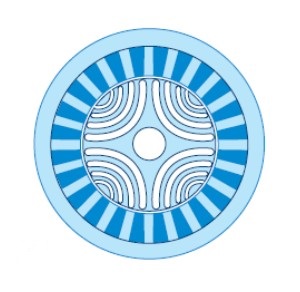
Особенно интересен ротор, который представляет собой вал с болванкой из шихтованной стали. На роторе отсутствуют обмотки, а также постоянные магниты.
Выделяют три основных типа ротора реактивного двигателя: ротор с явно выраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.
а) Ротор с явно выраженными полюсами
б) Аксиально-расслоенный ротор
в) Поперечно-расслоенный ротор
Отличительная особенность синхронных реактивных двигателей (СРД) — отсутствие в них возбуждения со стороны ротора. Основной магнитный поток в этом двигателе создается исключительно за счет вращающейся МДС обмотки статора.
Так как, СРД – синхронная машина, то его механическая характеристика в разомкнутой системе будет абсолютно жесткой.

Достоинства и недостатки синхронного реактивного двигателя:
Преимущества СРД:
1. Простота и надежность ротора, состоящего из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки;
2. Низкий нагрев. Так как в роторе нет обмоток, поэтому через него не протекает активный ток с выделением тепла. Это положительно сказывается на сроке жизни подшипников, а также на коэффициенте полезного действия системы. Так как снижаются потери на нагрев, то номинальный ток двигателя может быть завышен, что позволяет получить (при аналогичной мощности) более высокий момент (на 20-40%), чем у асинхронного двигателя.
3. Отсутствие магнитов. Из-за этого снижается конечная цена двигателя, так как при производстве не используются редкоземельные элементы.
4. Низкий момент инерции ротора. Так как ротор представляет собой болванку без магнитов и обмоток, которые увеличивают этот показатель в асинхронных двигателях и двигателях с постоянными магнитами. Соответственно, уменьшается типоразмер двигателей. Из чего вытекает следующее преимущество.
5. Меньшие габариты при той же мощности в сравнении с АД.
6. Высокий КПД и cosφ (косинус фи). При работе от сети, а такие двигатели в старых системах работали от сети и снабжались дополнительной пусковой обмоткой на роторе, СРД демонстрировали не лучшие энергетические показатели, но применяя специализированный преобразователь частоты, например, YASKAWA GA700 и GA500, разработанный для работы с синхронными реактивными двигателями, картина в корне меняется. В таких преобразователях происходит разделение между сетью и питающим напряжением двигателя, а программное обеспечение позволяет корректировать выходной ток, создавая наиболее благоприятные условия работы двигателя (в GA700 режим EZOLV). Таким образом СРД оставляет за собой все преимущества, описанные выше, избегая недостатков возникавших ранее при работе от сети. Если все – таки происходит снижение коэффициента мощности, это может означать, что для данного применения должен быть выбран преобразователь на больший номинальный ток.
7. Абсолютно жесткая механическая характеристика в разомкнутой системе. Это говорит о том, что двигатель способен поддерживать скорость на заданном уровне с большой точностью, до тех пор, пока момент не превысит максимальное значение.
Недостатки СРД:
1. Пуск и работа СРД возможны только от преобразователя частоты. Бездатчиковая система управления отслеживания положения ротора является необходимым условием работы синхронного реактивного двигателя. Преобразователь в каждый момент времени отслеживает потребляемый ток двигателя, так как при повороте вала изменяется магнитное сопротивление в зазоре, и формирует магнитное поле в соответствии с этим изменением, добиваясь высокой производительности.
2. Низкий коэффициент мощности при работе с ослаблением поля. СРД демонстрируют лучшие энергетические показатели при работе в зоне насыщения. При выходе на повышенную скорость, необходимо уменьшить ток намагничивания машины id, в результате чего, заметно упадет момент двигателя, а коэффициент мощности резко снизится в следствие потребления большего реактивного тока. Поэтому для применений в которых осуществляется работа на повышенных скоростях такие двигатели лучше не использовать.
Заключение:
Синхронные реактивные двигатели являются перспективным направлением для интеграции в новые системы и для модернизации старых систем электропривода. Больший КПД на всем диапазоне скоростей в сравнении с СДПМ и АД способствует в пользу выбора этого двигателя при разработке новых систем, соответствующих международному стандарту энергоэффективности IE4. Простота конструкции ротора и проверенная технология изготовления статора позволяют такому двигателю легко найти свое применение в насосных агрегатах и вентиляторах, а также в применениях с постоянным моментом и регулированием скорости вниз от номинала. Единственной проблемой такого двигателя является потребление большего реактивного тока в сравнении с асинхронными двигателями, но при использовании частотного преобразователя YASKAWA GA700 и GA500 этот недостаток легко устраняется.
Современные синхронные реактивные двигатели
В синхронных реактивных электродвигателях принцип создания момента вращения ротора несколько отличается от асинхронных и традиционных синхронных двигателей. Здесь решающая роль отводится самому сердечнику ротора.
Ротор реактивного синхронного двигателя не имеет обмоток, даже короткозамкнутой обмотки на нем нет. Вместо этого сердечник ротора сделан сильно неоднородным по магнитной проводимости: магнитная проводимость вдоль ротора отличается от магнитной проводимости поперек. Благодаря такому необычному подходу отпадает необходимость как в обмотках ротора, так и в постоянных магнитах на нем.
Что касается статора, то обмотка статора реактивного синхронного двигателя может быть сосредоточенной либо распределенной, при этом сердечник статора и корпус остаются обычными. Вся особенность — в сильно неоднородном сердечнике ротора.
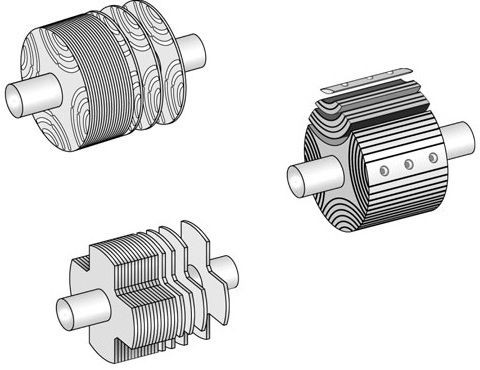
Для реактивных синхронных двигателей характерны три основных типа роторов: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор.
Физика процесса следующая. Переменный ток подается на обмотки статора, и создает вокруг ротора вращающееся магнитное поле, которое максимально в воздушном зазоре между статором и ротором. Момент вращения получается благодаря тому, что ротор все время пытается повернуться так, чтобы магнитное сопротивление для формируемого статором магнитного потока оказалось бы минимальным.
Максимальный момент вращения оказывается прямо пропорциональным разнице между продольной и поперечной индуктивностями, и чем больше эта разница, тем большим получается вращающий момент ротора.
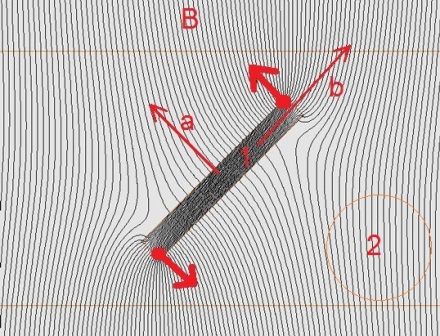
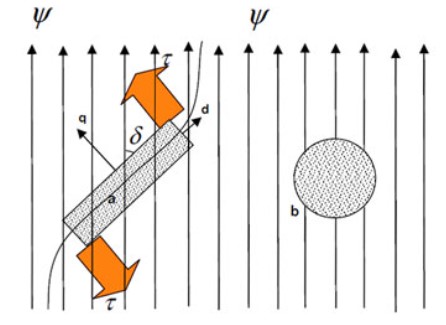
Для понимания данного принципа обратимся к рисунку. Анизотропный объект 1 обладает различной магнитной проводимостью по осям a и b. При этом изотропный объект 2 обладает одинаковой магнитной проводимостью по всем направлениям. Приложенное к объекту 1 магнитное поле порождает момент вращения когда угол между осью b и линиями магнитной индукции B не равен нулю. Когда неравный нулю угол существует, объект 1 станет искажать приложенное магнитное поле B, и направление искажения будет совпадать с осью a объекта 1.

Синусоидальное магнитное поле, создаваемое в синхронном реактивном двигателе обмоткой статора, вращается с определенной синхронной угловой частотой, и следовательно всегда будет иметь место момент вращения, стремящийся вернуть систему в состояние с наименьшим значением полной потенциальной энергии.
То есть момент вращения будет все время стремиться уменьшить искажение магнитного поля статора в направлении оси a, путем уменьшения угла между линиями индукции B и осью b. Так, если управление двигателем направлено на сохранение постоянства этого угла, то и механическая энергия постоянно будет получаться из электромагнитной.
Таким образом, ток обмотки статора обеспечивает намагничивание с существованием вращающего момента, направленного на устранение искаженности поля, и управляя фазой тока в соответствии с положением ротора во вращающейся системе координат (в соответствии со значением угла искажений), получается управление моментом синхронного реактивного электродвигателя.
Синхронные реактивные электродвигатели сегодня
Ведущие мировые производители электродвигателей на сегодняшний день проявляют особый интерес к синхронным реактивным электродвигателям, хотя запатентованы первые версии были еще в конце 19 века. Дело в том, что КПД синхронных реактивных электродвигателей принципиально значительно превышает КПД популярных асинхронных электродвигателей, не говоря уже об удельной мощности.
Потери энергии в роторе отсутствуют, а ведь обычно процентов 30 потерь приходится именно на ротор. Так повышается и срок службы электродвигателя — снижается вредный нагрев. Масса синхронного реактивного электродвигателя и его габариты на 20% меньше чем у асинхронного той же мощности.

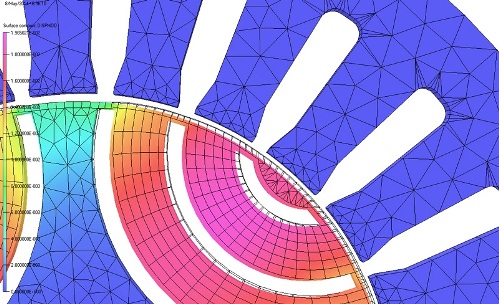
Возобновленный интерес к синхронным реактивным электродвигателям в наши дни связан прежде всего с широкими возможностями современного компьютерного моделирования, позволяющими находить наиболее эффективные версии конструкций роторов и статоров — научные исследования получаются более продуктивными, и КПД современных версий синхронных реактивных двигателей уже достигает 98%, в то время как для асинхронных версий КПД традиционно не превышает 90%.
Синхронные реактивные двигатели изготавливают сегодня на базе асинхронных, и при тех же габаритах и установочно-присоединительных размерах получается более высокий КПД, достигается более высокая удельная мощность.
Преимущества и недостатки
Набранный из тонколистовой электротехнической стали, ротор реактивного синхронного двигателя имеет простую и надежную конструкцию без короткозамкнутой обмотки и без магнитов, поэтому в роторе исключены токи вызывающие вредный нагрев, - срок службы повышается, а отсутствие магнитов удешевляет себестоимость продукта, включая до минимума сниженные затраты на техобслуживание.
Благодаря сравнительной легкости ротора, его собственный момент инерции низок, поэтому двигатель быстрее разгоняется до номинальных оборотов, что приводит к экономии электроэнергии.
Частотный преобразователь в качестве регулятора скорости делает управление двигателем очень гибким в широком диапазоне рабочих скоростей. Что касается недостатков, то он всего один: потребность в преобразователе частоты.
Применение преобразователя частоты с активной коррекцией коэффициента мощности позволяет добиться максимального коэффициента мощности системы, что очень важно на любом современном производстве.
Синхронный двигатель реактивного типа – довольно функциональная разработка, позволяющая обеспечивать требуемый уровень мощности и решать задачи, которые не под силу другим типам моторов. Обладают модели своими конструктивными особенностями, которые заслуживают особого внимания. Их мы и опишем.
Применение электрических двигателей существенно улучшает показатели развития промышленной и бытовой отраслей, повышает показатели автоматизации производства. На сегодняшний день на рынке представлено множество разнотипных силовых агрегатов, находящих свое применение в разнообразных отраслях деятельности. Сегодня мы поговорим о синхронных реактивных двигателях. Каждый такой мотор – это привычный нам синхронный электрический двигатель, но его момент вращения обусловливается различиями магнитных проводимостей по двум роторным осям: продольной и поперечной. Сам же якорь не обладает постоянными магнитами или намотками возбуждения.
Конструктивные особенности
Стационарная часть мотора – статор, комплектуется обмотками двух типов: или распределенного, или сосредоточенного. Также конструкция включает корпус и металлический сердечник, который также включает обмотку.
Ротор же представлен сразу в трех модификациях:
- с полюсами явновыраженного типа;
- аксиально – расслоенной конструкции;
- поперечно – расслоенный.
Каждый ротор создает момент вращения посредством уровня магнитного сопротивления. Такой тип электродвигателя относится к агрегатам с индивидуальным возбуждением, и ротор, используемый в этом моторе, является несимметричным. Всего существует несколько вариаций таких силовых агрегатов, но модели синхронного типа действия являются наиболее распространенными.
Принцип функционирования реактивного мотора
Обмотки статора пропускают через себя ток переменного типа, с помощью чего и создается магнитное поле, которое находится в постоянном вращении в воздушном зазоре мотора. Момент вращения генерируется сразу после того, как роторных компонент начинает устанавливать свою ось, которая будет наиболее магнито проводящей с приложенным полем. На рисунке она отмечается как ось d. Делается это для того, чтобы свести к минимуму уровни магнитного сопротивления в аналогичной цепи.
Далее принцип работы подразумевает возникновение моментной амплитуды, которая является прямо пропорциональной разнице двух показателей: поперечной Lq и продольной Ld индуктивностями. Исходя из этого, можно утверждать, что чем выше эта разница, тем больше генерируемый момент.
Синхронный реактивный двигатель генерирует магнитное поле с использованием обмотки статора, распределенной синусоидально. Поле оборачивается с синхронной скоростью и считается синусоидальным.
Для обеспечения слаженной работы, необходимо, чтобы всегда был момент, нацеленный на уменьшение полной потенциальной энергии в системе, посредством снижения уровня полевого искажения. Реализуется это на оси q, при условии, что δ стремиться к нулю. Если угол δ будет константным, например, с помощью контроля мощности магнитного поля, то энергия электромагнитной природы, будет на постоянной основе преобразовываться в механическую.
Статорный ток регулирует намагничивание и генерирование крутящего момента, с помощью которого можно уменьшать искаженность поля. Регулирование момента проводится путем мониторинга токовых фаз, по сути – угла между двум величинами:
- осью d ротора в системе координат вращений;
- током статорных намоток.
Диаграмма
Векторная диаграмма синхронного реактивного двигателя включает в себя несколько аспектов. Самая важная характеристика этого двигателя — постоянная скорость. Вначале, если ротор не может подключиться через магнитное поле статора, в этой ситуации на ум приходит демпферная обмотка. Они также используются в двигателях синхронного действия.
Размещение данных намоток может выполняться внутри наконечников полюсов, создающих момент демпфирования через несоответствие относительных скоростных параметров ротора или статорного магнитного поля .

Это явление имеет место, когда ротор не срабатывает, тем самым, не обеспечивая подключение через статор. Демпфирующий момент вращения генерируется исходя из физического закона Ленца, согласно которому имеет место несоответствие скоростей движения роторного магнитного поля и непосредственно статором.
Крутящий момент демпфирующий осуществляет перемещение намотки ротора таким образом, чтобы она блокировалась через поле статора.
Уравнение реактивного двигателя
Ранее мы уже описывали такую характеристику двигателя, как крутящий момент, сейчас давайте же рассмотрим вкратце его уравнение. Оно важно, когда осуществляется проектирование синхронного реактивного электродвигателя, ведь позволяет учитывать все его важные параметры.
Вот как выглядит уравнен ие :
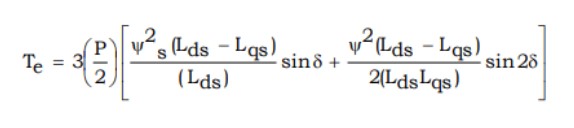
- Te — момент вращения, максимально возможный;
- P – ситуация отсутствия полюсов;
- Ψ – индуцированное потокосцепление с помощью тока возбуждения;
- Lds – показатель индуктивности согласно прямой оси;
- Lqs – индуктивность оси квадратурности;
- δ – число угла крутящего момента.
Соотношение показателей Ldm/Lqm в реактивных моторах синхронного типа довольно высокое, что обусловливает наличие высокого коэффициента полезного действия. Также, такие силовые агрегаты работают на высоких скоростях, что существенно их выделяет на фоне остальных вариантов исполнения.
Высокие отношения между Ldm и Lqm обусловлены применением в процессе разработки анизотропной конструкции.
Сильные и слабые стороны моторов
Компоновка реактивных моторов обладает множеством особенностей, которые позволяют выделять агрегаты в новый, самостоятельный вид. Именно эти характеристики определяют сильные и слабые стороны двигателей.
К преимуществам относят:
- простота и надежность конструкции ротора, которая включает элементы, изготовленные из электротехнической стали тонколистового литья. Магнитов и короткозамкнутой обмотки нет;
- низкий уровень нагрева даже при интенсивной эксплуатации. Токи в якоре отсутствуют, таким образом, просто нет факторов, которые бы усиливали нагрев и, следственно – сокращали срок применения;
- отсутствие необходимого уровня возбуждения поля при наличии нулевого момента вращения, что обусловливает полное отсутствие потерь в электромагнитных вращениях;
- отсутствие магнитов. Данный фактор позволяет снижать общую стоимость устройства, без снижения продуктивности. Затраты на обслуживание и содержание, также сокращаются;
- снижение момента инерции ротора. Данный показатель существенно ниже из-за того, что конструкция ротора не предусматривает наличия ни магнитов, ни обмотки. Это дает возможность силовому агрегату на порядок быстрее достигать скоростных показателей, разгоняться, параллельно при этом экономя энергию;
- отсутствие такого явления, как размагничивание. Обусловливается оно вышеуказанным отсутствием магнитов. Особенно выгодно это преимущество по отношению к агрегатам, конструкция которых включает постоянные магниты;
- регулирование скорости. Исходя из того, что для максимально полной эффективности работы синхронного реактивного двигателя нужно установить частотный преобразователь, в моторе есть функция управления скоростями оборотов в широких диапазонах.
Применение такого силового агрегата экономически выгодное и довольно простое в сервисном обслуживании.
- реализованное только управление частотного типа. чтобы осуществлять точное управление необходимо дополнительно установить частотный преобразователь;
- низкие коэффициенты мощности. Обусловливается тем, что генерирование магнитного потока осуществляется при помощи реактивного тока. Решить этот вопрос можно, опять же, применив преобразователь частоты напряжения.
Сферы использования
Моторы реактивного способа действия довольно широко распространены в хозяйственной отрасли. Вот основные области применения:
- маломощное текстильное оборудование. Здесь ключевой фактор при выборе – низкая стоимость, прочность конструкции, простота устройства;
- приложения, в которых требуется наличие постоянной скорости: таймеры, фонографы, управленческие устройства, приборы записи и др.;
- в дозирующем оборудовании, конвейерах, насосах;
- в регуляторах, поворотных механизмах, оборудовании для изготовления синтетических волокон;
- упаковочных машинах, вспомогательном оборудовании;
- при производстве изделий из сплошных листов (металла, например), пленочного материала.
Выводы
Применение двигателя данного типа обеспечит не только высокую продуктивность и защищенность управляемого оборудования, а также хорошие экологические и экономические показатели. Немаловажную роль в этих преимуществах играет отсутствие магнитов, применение которых обусловливает свои особенности, в частности необходимость регулярной замены.
Такие модели реактивного типа обладают параметрами, характерными другим видам, например, простотой компоновки асинхронных агрегатов и высоким КПД синхронных устройств. Несмотря на сильные стороны, приборы не лишены недостатков, но, преимущества перекрывают их, делая приобретение синхронных реактивных двигателей выгодной инвестицией.
Читайте также: