
Реферат на тему статика
Обновлено: 04.07.2024
Из результатов расчетов следует, что стержни 1, 4, 5, 8 и 11 сжаты. Результаты графического метода и аналитического метода совпадают.
1.6 Определение усилий в стержнях фермы построением диаграммы Максвелла-Кремоны
Построим ферму в масштабе длин и изобразим все заданные силы и реакции опор в масштабе сил так, чтобы они были расположены вне контура фермы (рис. 12).
Обход планируем осуществлять против часовой стрелки и обозначим большими буквами латинского алфавита A, В, С, D области, ограниченные внешними силами и стержнями фермы, а также внутренние области, ограниченные только стержнями. Это необходимо для введения единого способа обозначения активных сил, реакций опор и реакций стержней.
Построим многоугольник внешних сил, т. е. активных сил и реакции опор, отложив в нем силы в том порядке, в котором они встречаются при обходе фермы в выбранном направлении, и обозначив их малыми буквами, соответствующими названиям пограничных областей.
Используя графический метод вырезания узлов, к многоугольнику внешних сил последовательно пристроим силовые многоугольники для всех узлов фермы, начиная с узла VII, обозначив реакции стержней по тому же правилу, что и внешние силы.
Результаты представлены на рис. 12 и в таблице 4.
Рис. 12 — Диаграмма Максвелла-Кремоны
Из результатов расчетов следует, что стержни 1, 4, 5, 8 и 11 сжаты. Результаты совпадают с методом вырезания узлов.
1.7 Определение усилий в стержнях фермы методом Риттера
Метод Риттера (способ сечений) в общем случае предполагает предварительное определение реакций опор фермы, хотя усилия в некоторых стержнях (при определенном расположении опор фермы) можно определить, не зная опорных реакций. Если реакции опор фермы определены, то метод Риттера позволяет оперативно найти усилие в данном стержне, при этом, как правило, определение усилия является автономным, т.е. не связанным с определением усилий в других стержнях. Для этого необходимо выполнение одного условия: конструкция фермы должна быть такой, чтобы существовала возможность рассечения фермы на две части по трем стержням, среди которых находится стержень, усилие в котором определяется.
Курсовая работа технология ферм
. Для определения внутренних усилий в стержнях фермы сначала надо найти реакции опор Ra и Rb . Для этого мысленно отбрасываем опоры А и В и мысленно заменяем их действие на ферму реакциями RA . и Rb . Ввиду симметрии фермы .
Для определения усилий в стержнях 8, 9 и 10 выполним сечение по этим стержням, и рассмотрим равновесие левой части фермы. Расчетная схема изображена на рис. 13. На левую часть фермы действуют известные силы и и реакции отброшенной части , и .
Рис. 13 – Схема для определения усилий в стержнях 8, 9 и 10
Чтобы определить усилие независимо от усилий и , составляем уравнение моментов сил относительно точки C , в которой пересекаются линии действия сил и :
Чтобы определить усилие независимо от усилий и , составляем уравнение моментов сил относительно точки D, в которой пересекаются линии действия сил и :
Для определения усилия составим уравнение моментов относительно точки В, в которой пересекаются линии действия сил и :
Из уравнения (11)
Из уравнения (12)
Из уравнения (13)
Для определения усилий в стержнях 4, 5 и 6 выполним сечение по этим стержням, и рассмотрим равновесие левой части фермы. Расчетная схема изображена на рис. 14. На левую часть фермы действуют известные силы и и реакции отброшенной части , и .
Рис .14 — Схема для определения усилий в стержнях 4, 5 и 6
Для определения усилий , и составим уравнения моментов относительно точек Риттера А, В и С соответственно:
Из уравнения (14)
Из уравнения (15)
Из уравнения (16)
В связи с конструктивными особенностями дальнейшие расчеты методом Риттера не представляются возможными. Результаты сведем в таблицу 5.
Из результатов расчетов следует, что стержни 4, 5, 8 сжаты. Результаты совпадают с методами вырезания узлов и построением диаграммы Максвелла-Креморы.
2 Расчет плоских составных конструкций
2.1 Исходные данные
Данные для расчета представлены в таблице 6, заданные реакции для расчета представлены в таблице 7.
2.2 Решение задачи по схеме 111
Конструкция (рис. 15) состоит из двух частей: горизонтальной балки АС и наклонной балки ВС. В точке А балка АС закреплена с помощью жесткой заделки, точка В наклонной балки соединена со стеной посредством стержневой опоры. Балки соединены шарнирным соединением в точке С. На конструкцию действует треугольная нагрузка максимальной интенсивности qmax и пара сил с моментом М. Определить реакции опор А, В и С, а также момент в заделке А.
Основные классы неорганических соединений и типы химических реакций
. гидроксид меди Сu(ОН)2. Важнейшее химическое свойство оснований - способность образовывать с кислотами соли. Например, при взаимодействии перечисленных оснований с соляной кислотой получаются хлористые соли соответствующих металлов - хлориды натрия или .
Рассмотрим равновесие всей конструкции как абсолютно твердого тела, освободив ее от связей в точках А и В. Расчетная схема представлена на рис. 16
- , — составляющие реакции заделки;
- МА – момент в заделке;
- реакция стержневой опоры;
- равнодействующая распределенной нагрузки, модуль которой
Составим уравнения равновесия для всей конструкции:
Рассмотрим равновесие балки СВ:
Решая систему уравнений (17)-(22), находим неизвестные.
Из уравнения (22)
Из уравнения (21)
Из уравнения (18)
Из уравнения (19)
2.3 Решение задачи по схеме 211
Конструкция (рис. 17) состоит из двух частей: вертикальной балки АС и наклонной балки ВС. В точке А балка АС закреплена с помощью жесткой заделки, точка В наклонной балки соединена со стеной посредством неподвижной шарнирной опоры. Балки соединены стержневой опорой в точке С. К балке ВС приложена равномерно распределенная нагрузка интенсивности q, а на балку АС действует сила F, направленная под углом β. Определить составляющие реакции опор А и В — и .
Рассмотрим равновесие всей конструкции как абсолютно твердого тела, освободив ее от связей в точках А и В. Расчетная схема представлена на рис. 18.
- , — составляющие реакции заделки;
- , — составляющие реакции опоры;
- равнодействующая распределенной нагрузки, модуль которой
Т. к. не требуется считать неизвестные и , будем работать с теми уравнениями, где отсутствуют эти величины.
Рассмотрим равновесие балки ВС
Из уравнения (23)
Рассмотрим равновесие всей конструкции, приняв ее монолитной:
Из уравнения (24), совместно с уравнением (23):
Рассмотрим равновесие балки АС:
Из уравнения (25)
Тогда из уравнения (23)
2.4 Решение задачи по схеме 311
Конструкция (рис. 19) состоит из трех частей: горизонтальной балки АС, наклонной балки CD и еще одной горизонтальной балки BD. В точке А балка АС закреплена с помощью жесткой заделки, точка В горизонтальной балки соединена со стеной посредством неподвижной шарнирной опоры. Наклонная балка с двух сторон соединена с горизонтальными щарнирной опорой в точках С и D. К балкам CD и BD приложена равномерно распределенная нагрузка интенсивности q, а на балку АС действует сила F, направленная под углом β. Определить составляющие реакции опор В и D — и .
Рассмотрим равновесие всей конструкции как абсолютно твердого тела, освободив ее от связей в точках А и В. Расчетная схема представлена на рис. 20.
Равнодействующая равномерно распределенной нагрузки приложена в середине участков CD и BD, а ее модуль соответственно определяется по формулам:
Расчет и проектирование сварной балки двутаврового сечения
. Расчет и конструирование балки Определяем расчётные нагрузки F р , кН, по формулам (1) где - нормативные нагрузки, кН; - коэффициент условий работы, кН; = 1,10. сварная балка . большой объем сварных конструкций производится на поточных линиях. 1. Конструкторский раздел 1.1 Описание конструкции балки В данном курсовом проекте рассчитывается и проектируется сварная балка двутаврового сечения. Балка ? .
Т. к. не требуется считать неизвестные , и , будем работать с теми уравнениями, где отсутствуют эти величины. Для этого рассмотрим отдельно равновесие балки BD (рис. 21).
Реакции и определять не нужно. Составляем такие уравнения, в которые эти величины не входят:
Из уравнения (26)
Из уравнения (27)
Примеры похожих учебных работ
Курсовая работа технология ферм
. буквами также части плоскости, ограниченные стержнями фермы; узлы фермы обозначаем римскими цифрами; стержни нумеруем арабскими . полная (суммарная) нагрузка, кгс/м2 ; b – расстояние между фермами (шаг ферм), м; d – расстояние между узлами, м; Р – .
Технология изготовления и конструирования ферм
. статически определимые стержни (в одном направлении, перпендикулярном линии опирания их на балки). 1. Стропильные фермы Железобетонные фермы применяют в качестве ригелей покрытий при пролетах 18 м и более .
Расчет и проектирование стропильной фермы
. Определение усилий в стержнях фермы Усилия в стержнях фермы найдем графическим методом По диаграмме Максвелла - Кремоны. Схемы стропильной фермы и распределения нагрузок приведены на рис. 5,1. Таблица 3 .
Изгиб прямолинейного стержня
. касательных напряжений по сечению. Касательные напряжения при изгибе максимальны на нейтральной оси и при . для стержней кольцевого сечения – τmax = 2(Q/A). Условие прочности стержней при изгибе по касательным напряжениям имеет вид τ max ≤ τadm , где .
Строительные фермы
. зависимости от системы кровельного покрытия. Желательно для исключения работы пояса на изгиб обеспечить передачу нагрузки от кровли на узлы фермы. Поэтому в покрытиях из крупноразмерных железобетонных или металлических .
Проект железобетонной двускатной балки
. VП = 1,070 м³; масса плиты mП = 2,65 т 1 1.2.3 Подкрановые балки Применение железобетонных подкрановых балок рационально при мостовых кранах грузоподъемностью до 300 кН. При шаге колонны .
Формулировки основных аксиомы статики и их следствий. Понятие сходящихся систем сил, произвольно-плоской и произвольно-пространственной систем сил, центра тяжести твердого тела. Способы определения координат центров тяжести тел и геометрических фигур.
| Рубрика | Физика и энергетика |
| Вид | реферат |
| Язык | русский |
| Дата добавления | 06.06.2014 |
| Размер файла | 836,3 K |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Все теоремы и уравнения статики выводятся из нескольких исходных положений, принимаемых без математических доказательств и называемых аксиомами или принципами статики. Аксиомы статики представляют собою результат обобщений многочисленных опытов и наблюдений над равновесием и движением тел, неоднократно подтвержденных практикой. Часть из этих аксиом является следствиями основных законов механики, с которыми мы познакомимся в динамике.
Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F1 = F2) и направлены вдоль одной прямой в противоположные стороны (рис. 10).
Аксиома 1 определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равновесии не может.
Аксиома 2. Действие данной системы, сил на абсолютно твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил.
Эта аксиома устанавливает, что две системы сил, отличающиеся на уравновешенную систему, эквивалентны друг другу.
Следствие из 1-й и 2-й аксиом. Действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела.
аксиома статика центр тяжести
В самом деле, пусть на твердое тело действует приложенная в точке А сила (рис.11). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы и , такие, что , . От этого действие силы на тело не изменится. Но силы и согласно аксиоме 1 также образуют уравновешенную систему, которая может быть отброшена. В результате на тело. Будет действовать только одна сила , равная , но приложенная в точке В.
Таким образом, вектор, изображающий силу , можно считать приложенным в любой точке на линии действия силы (такой вектор называется скользящим).
Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах.
Вектор , равный диагонали параллелограмма, построенного на векторах и (рис.12), называется геометрической суммой векторов и :
Конечно, Такое равенство будет соблюдаться только при условии, что эти силы направлены по одной прямой в одну сторону. Если же векторы сил окажутся перпендикулярными, то
Следовательно, аксиому 3 можно еще формулировать так: две силы, приложенные к телу в одной точке, имеют равнодействующую, равную геометрической (векторной) сумме этих сил и приложенную в той же точке.
Аксиома 4. При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие.
Закон о равенстве действия и противодействия является одним из основных законов механики. Из него следует, что если тело А действует на тело В с силой , то одновременно тело В действует на тело А с такой же по модулю и направленной вдоль той же прямой, но противоположную сторону силой (рис. 13). Однако силы и не образуют уравновешенной системы сил, так как они приложены к разным телам.
Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым).
Высказанное в этой аксиоме утверждение очевидно. Например, ясно, что равновесие цепи не нарушится, если ее звенья считать сваренными друг с другом и т. д.
Системма сходямщихся сил -- это такая система сил, действующих на абсолютно твёрдое тело, в которой линии действия всех сил пересекаются в одной точке.
Такая система сил является на плоскости статически определимой, если число неизвестных сил в ней не больше двух (а не трёх, как в других статически определимых системах)
В трёхмерном пространстве сходящаяся система сил является статически определимой, если число неизвестных сил в ней не превышает трёх.
Произвольная плоская система сил - это система сил, линии действия которых расположены в плоскости независимо.
Любая плоская произвольная система сил, действующих на абсолютно твердое тело, при приведении к произвольно избранному центру О, может быть заменена одной силой, равняющейся главному вектору системы и приложенной в центре приведения О, и одной парой с моментом, равняющемуся главному моменту системы относительно центра О.
Уравнения равновесия - это условия равновесия, в которые входят известные активные силы и неизвестные реакции связей, т.е. аналитические условия равновесия данной системы сил.
Задача называется статически определимой, если число неизвестных реакций связей равняется числу независимых уравнений равновесия.
Если для данной конструкции число всех реакций (неизвестных) будет больше количества уравнений, в которые входят реакции, то конструкция будет статически неопределимой.
В зависимости от взаимного движения тел трение между твердыми телами бывает трех видов:
Пространственная система сил. Система сил называется пространственной, если линии их действия расположены в пространстве произвольным образом. Для пространственных систем сил остаются справедливыми все те положения, которые были сформулированы для плоской системы сил.
Центр тяжести твердого тела
Центром тяжести твердого тела называется неизменно связанная с этим телом точка С, через которую проходит линия действия равнодействующей сил тяжести данного тела, при любом положении тела в пространстве.
Центр тяжести применяется при исследовании устойчивости положений равновесия тел и сплошных сред, находящихся под действием сил тяжести и в некоторых других случаях, а именно: в сопротивлении материалов и в строительной механике - при использовании правила Верещагина.
Существуют два способа определения центра тяжести тела: аналитический и экспериментальный. Аналитический способ определения центра тяжести непосредственно вытекает из понятия центра параллельных сил.
Координаты центра тяжести, как центра параллельных сил, определяются формулами:
где Р - вес всего тела; pk - вес частиц тела; xk, yk, zk - координаты частиц тела.
Для однородного тела вес всего тела и любой её части пропорционален объёму P=Vг, pk=vkг , где г - вес единицы объёма, V - объем тела. Подставляя выражения P, pk в формулы определения координат центра тяжести и, сокращая на общий множитель г, получим:
Точка С, координаты которой определяются полученными формулами, называется центром тяжести объема.
Если тело представляет собой тонкую однородную пластину, то центр тяжести определяется формулами:
где S - площадь всей пластины; sk - площадь её части; xk, yk - координаты центра тяжести частей пластины.
Точка С в данном случае носит название центра тяжести площади.
Числители выражений, определяющих координаты центра тяжести плоских фигур, называются статическими моментами площади относительно осей у и х:
Тогда центр тяжести площади можно определить по формулам:
Для тел, длина которых во много раз превышает размеры поперечного сечения, определяют центр тяжести линии. Координаты центра тяжести линии определяют формулами:
где L - длина линии; lk - длина ее частей; xk, yk, zk - координата центра тяжести частей линии.
Способы определения координат центров тяжести тел
Основываясь на полученных формулах, можно предложить практические способы определения центров тяжести тел.
1. Симметрия. Если тело имеет центр симметрии, то центр тяжести находится в центре симметрии.
Если тело имеет плоскость симметрии. Например, плоскость ХОУ, то центр тяжести лежит в этой плоскости.
2. Разбиение. Для тел, состоящих из простых по форме тел, используется способ разбиения. Тело разбивается на части, центр тяжести которых находится методом симметрии. Центр тяжести всего тела определяется по формулам центра тяжести объема (площади).
Пример. Определить центр тяжести пластины, изображенной на помещенном ниже рисунке. Пластину можно разбить на прямоугольники различным способом и определить координаты центра тяжести каждого прямоугольника и их площади.
Ответ: xc=17.0см; yc=18.0см.
Дополнение. Этот способ является частным случаем способа разбиения. Он используется, когда тело имеет вырезы, срезы и др., если координаты центра тяжести тела без выреза известны.
Пример. Определить центр тяжести круглой пластины, имеющей вырез радиусом r = 0,6 R
Круглая пластина имеет центр симметрии. Поместим начало координат в центре пластины. Площадь пластины без выреза
Площадь пластины с вырезом
Пластина с вырезом имеет ось симметрии О1x, следовательно, yc=0.
4. Интегрирование. Если тело нельзя разбить на конечное число частей, положение центров тяжести которых известны, тело разбивают на произвольные малые объемы , для которых формула с использованием метода разбиения принимает вид:
Далее переходят к пределу, устремляя элементарные объемы к нулю, т.е. стягивая объемы в точки. Суммы заменяют интегралами, распространенными на весь объем тела, тогда формулы определения координат центра тяжести объема принимают вид:
Формулы для определения координат центра тяжести площади:
Координаты центра тяжести площади необходимо определять при изучении равновесия пластинок, при вычислении интеграла Мора в строительной механике.
Пример. Определить центр тяжести дуги окружности радиуса R с центральным углом АОВ = 2б (рис. 6.5).
Дуга окружности симметрична оси Ох, следовательно, центр тяжести дуги лежит на оси Ох, yс = 0.
Согласно формуле для центра тяжести линии:
Экспериментальный способ. Центры тяжести неоднородных тел сложной конфигурации можно определять экспериментально: методом подвешивания и взвешивания. Первый способ состоит в том, что тело подвешивается на тросе за различные точки. Направление троса на котором подвешено тело, будет давать направление силы тяжести. Точка пересечения этих направлений определяет центр тяжести тела.
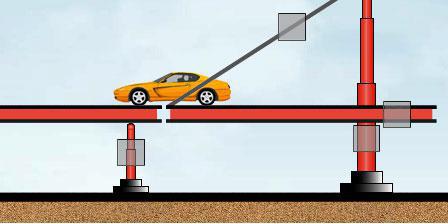
Метод взвешивания состоит в том, что сначала определяется вес тела, например автомобиля. Затем на весах определяется давление заднего моста автомобиля на опору. Составив уравнение равновесия относительно какой- либо точки, например оси передних колес, можно вычислить расстояние от этой оси до центра тяжести автомобиля.
Иногда при решении задач следует применять одновременно разные методы определения координат центра тяжести.
Центры тяжести некоторых простейших геометрических фигур
Для определения центров тяжести тел часто встречающейся формы (треугольника, дуги окружности, сектора, сегмента) удобно использовать справочные данные.
Координаты центра тяжести некоторых однородных тел
Дуга окружности: центр тяжести дуги однородной окружности находится на оси симметрии (координата уc=0).
где б - половина центрального угла; R - радиус окружности.
Однородный круговой сектор: центр тяжести расположен на оси симметрии (координата уc=0).
где б - половина центрального угла; R - радиус окружности.
Сегмент: центр тяжести расположен на оси симметрии (координата уc=0).
где б - половина центрального угла; R - радиус окружности.
Треугольник: центр тяжести однородного треугольника находится в точке пересечения его медиан.
где x1, y1, x2, y2, x3, y3 - координаты вершин треугольника
Конус: центр тяжести однородного кругового конуса лежит на его высоте и отстоит на расстояние 1/4 высоты от основания конуса.
Всякое тело под влиянием сил, действующих со стороны других тел, вообще говоря, испытывает ускорение; в частности, покоящееся тело приходит в движение. Однако в некоторых случаях тело, находящееся под действием нескольких сил, все же может оставаться в покое. Так, если на покоящееся тело действуют одновременно две силы, равные по величине и направленные по одной прямой в противоположные стороны, то тело не испытывает ускорений и может оставаться в покое. В других случаях условия покоя тела при действии на него сил оказываются более сложными. Изучение этих условий, т. е. условий равновесия тел (или, иначе, условий равновесия сил), и составляет задачу статики.
Таким образом, статика прежде всего позволяет определить условия равновесия всех разнообразнейших сооружений, которые мы создаем: зданий, мостов, арок, подъемных кранов и т. д. Но этим не исчерпывается практическое значение статики. Статика позволяет дать ответ и на некоторые вопросы, касающиеся движения тел.
Законы статики вытекают из общих законов динамики как частный случай, когда скорости твердых тел стремятся к нулю, но по историческим причинам и педагогическим соображениям статику часто излагают независимо от динамики, строя ее на следующих постулируемых законах и принципах:
- законе сложения сил,
- принципе равновесия и
- принципе действия и противодействия.
В случае твердых тел (точнее, идеально твердых тел, которые не деформируются под действием сил) вводится еще один принцип, основанный на определении твердого тела. Это принцип переносимости силы: состояние твердого тела не изменяется при перемещении точки приложения силы вдоль линии ее действия.
В основе статики лежит система аксиом - экспериментально установленных истин, из которых выводятся все остальные законы статики.
Готовые работы на аналогичную тему
Две силы, приложенные к абсолютно твердому телу, будут уравновешены (эквивалентны нулю) тогда и только тогда, когда они равны по модулю, действуют по одной прямой и направлены в противоположные стороны (рис.1).
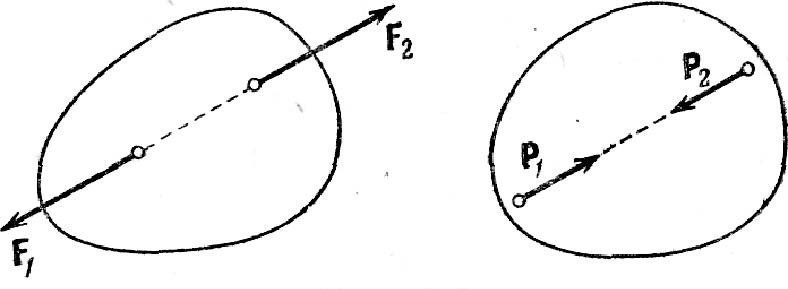
Примеры уравновешивания сил
Не нарушая состояния абсолютно твердого тела, к нему можно прикладывать или отбрасывать силы тогда и только тогда, когда они составляют уравновешенную систему, в частности, если эта система состоит из двух сил, равных по модулю, действующих по одной прямой и направленных в противоположные стороны.
Из аксиомы 2 вытекает следствие: не нарушая состояния тела, точку приложения силы можно переносить вдоль линии ее действия (рис.2).
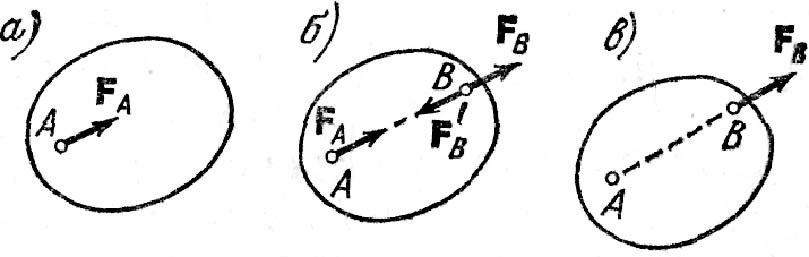
Точку приложения силы можно переносить вдоль линии её действия путём добавления системы уравновешивающих друг друга сил
Не меняя состояния тела, две силы, приложенные к одной его точке, можно заменить одной равнодействующей силой, приложенной в той же точке и равной их геометрической сумме (рис. 3).

Равнодействующая системы сил, приложенных к одной точке
Силы взаимодействия двух тел равны по модулю и направлены по одной прямой в противоположные стороны.
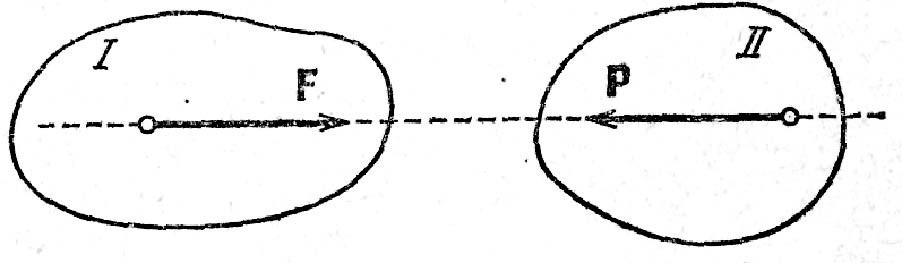
Если тело I действует на тело II с силой Р, а тело II действует на тело I с силой F (рис. 4), то эти силы равны по модулю (F = Р) и направлены по одной прямой в противоположные стороны, т. е. F = - Р.
Равновесие деформируемого тела не нарушится, если жестко связать его точки и считать тело абсолютно твердым.
Этой аксиомой пользуются в тех случаях, когда речь идет о равновесии тел, которые нельзя считать твердыми. Приложенные к таким телам внешние силы должны удовлетворять условиям равновесия твердого тела, однако для нетвердых тел эти условия являются лишь необходимыми, но не достаточными.
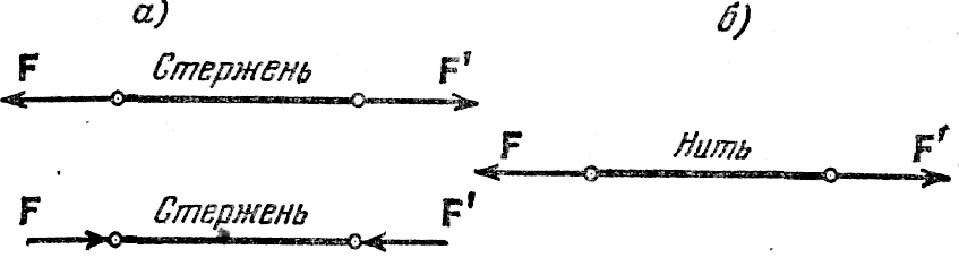
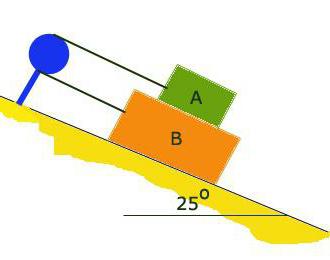
Силы, действующие на нить, были растягивающими (рис. 5), в то время как для стержня они могут быть и сжимающими (рис. а).
Стержень массой 9 кг и длиной 1 м лежит на двух опорах. Одна из них подпирает левый конец стержня, а другая находится на расстоянии 10 см от правого конца. С какой силой действует на стержень каждая из опор?
Требуется найти силы реакции опоры $N_1$ и $N_2$. Для решения задачи можем применить условие равновесия (правило моментов): $\Sigma $МО = 0.

$$m = 1 кг$$ $$L = 1 м$$ $$s = 0,1 м$$ $$N_1 - ?$$ $$N_2 - ?$$
Определим плечи сил относительно выбранной оси вращения - точки А: $ℓ_$ = 0, т.к. линия действия силы проходит через ось вращения; $ℓ_$ = AD;
Определим моменты сил: $МN_2$ = $N_2$•(L - s); $МN_1$ = 0; $Мmg$ = - $mg$•0,5L
Запишем правило моментов $\Sigma $МА = 0: 0 + $N_2$•(L - s) - 0,5mgL = 0, откуда $N_2$•(L - s) = 0,5mgL и $N_2$ = 0,5mgL / (L - s)
$N_2$ = 0,5 • 9 кг • 10 м/с2 • 1 м/ (1 м - 0,1 м) = 50 Н
Аналогично определяем плечи сил и моменты сил относительно точки D: $ℓ_$ = AD = L - s; $ℓ_$ = 0; $ℓ_$ = CD = 0,5L - s; $МN_1$ = - $N_1$•(L - s); М$N_2$ = 0.
Правило моментов относительно точки D: $mg$•(0,5L - s) - $N_1$•(L - s) + 0 = 0; Мmg = $mg$•(0,5L - s); $mg$•(0,5L - s) - $N_1$•(L - s) + 0 = 0
$N_1$ = mg•(0,5L - s) / (L - s) = 90 Н•0,4 м / 0,9 м = 40 Н
Ответ: $N_1$ = 40 Н; $N_2$ = 50 Н
Силу $N_1$ можно вычислить двумя способами:

I способ. Так как стержень в равновесии, то условие равновесия справедливо относительно любой оси вращения.
Выберем ось вращения в точке, определим плечи и моменты сил относительно точки D.
$N_1$ = $mg$•(0,5L - s) / (L - s)
II способ найти $N_1$.
Т. к. стержень неподвижен, то должно выполняться и другое условие равновесия $\sum<\overrightarrow
Спроецируем силы на вертикальную ось oY, получим -$mg$ + $N_1$ + $N_2$ = 0

Статика - это наука о методах количественной оценки силы взаимодействия между телами. Эти силы отвечают за поддержание равновесия, движение тел или изменение их формы. В повседневной жизни можно увидеть множество разнообразных примеров каждый день. Движения и изменения формы имеют решающее значение для функциональности как искусственных, так и природных объектов.

Понятие статики
Основы статики были заложены более 2200 лет назад, когда древнегреческий математик Архимед и другие ученые того времени занимались изучением усилительных свойств и изобретением простых механизмов, таких как рычаг и ось. Статика – это раздел механики, который имеет дело с силами, которые воздействуют на тела в состоянии покоя при условии равновесия.
Это раздел физики, который делает возможными аналитические и графические процедуры, необходимые для определения и описания этих неизвестных сил. Раздел "статика" (физика) играет важную роль во многих отраслях машиностроения, механической, гражданской, авиационной и биоинженерии, которые имеют дело с различными последствиями сил. Когда тело находится в состоянии покоя или движется с равномерной скоростью, то речь идет об этой области физики. Статика - это изучение тела в равновесии.
Методы и результаты данного раздела науки оказались особенно полезными при проектировании зданий, мостов и плотин, а также кранов и других подобных механических устройств. Чтобы иметь возможность рассчитать размеры таких конструкций и оборудования, архитекторы и инженеры должны сначала определить силы, которые действуют на их взаимосвязанные части.
Статика - это раздел физики, который изучает условия, при которых механические и другие системы остаются в определенном состоянии, которое не меняется со временем. Этот раздел физики опирается на пять основных аксиом:
1. Твердое тело находится в состоянии статического равновесия, если на него действуют две силы, имеющие одинаковую интенсивность, лежат на одной линии действия и направлены в противоположные стороны вдоль одной линии.
2. Твердое тело будет находиться в статическом состоянии до тех пор, пока на него не окажут воздействие внешние силы или система сил.
3. Равнодействующая двух сил, действующих в той же материальной точке, равна векторной сумме двух сил. Эта аксиома подчиняется принципу векторного суммирования.
4. Два взаимодействующих тела реагируют друг на друга с двумя силами, равными по интенсивности в противоположных направлениях вдоль одной линии действия. Эта аксиома также называется принципом действия и противодействия.
5. Если деформируемое тело находится в состоянии статического баланса, оно не нарушится, если физическое тело останется в твердом состоянии. Эту аксиому также называют принципом отвердевания.

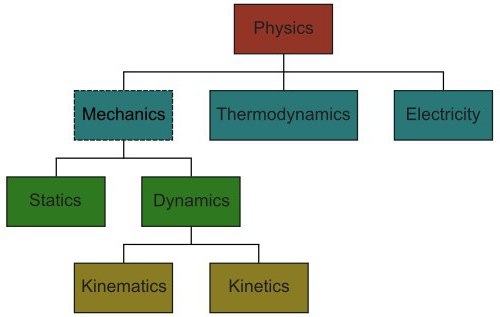
Механика и ее разделы
Физика в переводе с греческого (physikos – "естественный" и "физис" – "природа") дословно означает науку, которая занимается природой. Она охватывает все известные законы и свойства материи, а также силы, действующие на нее, среди которых гравитация, тепло, свет, магнетизм, электричество и другие силы, которые способны изменить основные характеристики предметов. Одним из разделов науки является механика, включающая такие важные подразделы, как статика и динамика, а также кинематика.
Механика – раздел физики, который занимается изучением сил, объектов или тел, находящихся в покое или в движении. Это один из крупнейших субъектов в области науки и техники. Задачи по статике включают в себя изучение состояния тел под воздействием различных сил. Кинематика – раздел физики (механики), который изучает перемещение объектов вне зависимости от сил, вызывающих движение.
Теоретическая механика: статика
Механика – это физическая наука, которая рассматривает поведение тел под действием сил. Выделяют 3 категории механики: абсолютно твердого тела, деформируемых тел и жидкости. Твердое тело – это тело, которое не деформируется под действием сил. Теоретическая механика (статика - часть механики абсолютно твердого тела) включает также и динамику, которая, в свою очередь, подразделяется на кинематику и кинетику.
Механика деформируемого тела занимается вопросами распределения сил внутри тела и вызываемых в связи с этим деформаций. Эти внутренние силы вызывают определенные напряжения в теле, которые в конечном итоге могут привести к изменению самого материала. Эти вопросы изучаются на курсах сопромата по сопротивлению материалов.
Механика жидкости – это раздел механики, которая занимается вопросами распределения сил внутри жидкостей или газов. Жидкости широко используются в инженерии. Они могут быть классифицированы как несжимаемые или сжимаемые. Областями применения являются гидравлика, аэрокосмическая отрасль и многие другие.
Понятие о динамике
Динамика имеет дело с силой и движением. Единственный способ изменить движение тела – это использовать силу. Наряду с силой динамика изучает другие физические понятия, среди которых следующие: энергия, импульс, коллизия, центр тяжести, крутящий момент и момент инерции.

Статика и динамика являются совершенно противоположными состояниями. Динамика - это учение о телах, которые не находятся в равновесии, при этом возникает ускорение. Кинетика занимается изучением сил, вызывающих движение, или сил, которые возникают в результате движения. В отличие от такого понятия, как статика, кинематика - учение о движении тела, в котором не учитывается тот факт, каким именно образом производится движение. Иногда ее называют "геометрией движения".
Кинематика
Кинематические принципы часто применяются для анализа определения позиции, скорости и ускорения в различных частях оборудования во время его эксплуатации. Кинематика рассматривает движение точки, тела и системы тел без рассмотрения причин движения. Движение описывается вектором величин, таких, как перемещение, скорость и ускорение наряду с указанием системы отсчета. Различные проблемы в кинематике решаются с помощью уравнения движения.

Механика – статика: фундаментальные величины
История механики насчитывает не одно столетие. Основные принципы статики были разработаны уже давным-давно. Всевозможные рычаги, наклонные плоскости и другие принципы были необходимы во времена ранних цивилизаций для построения, например, таких огромных конструкций, как пирамиды.
Фундаментальными величинами в механике являются длина, время, масса и сила. Первые три называются абсолютными, не зависящими друг от друга. Сила не является абсолютной величиной, поскольку она связана с массой и изменениями скорости.
Длина
Длина - это величина, которая используется для описания положения точки в пространстве относительно другой точки. Это расстояние называется стандартной единицей длины. Общепринятой стандартной единицей измерения длины является метр. Этот стандарт формировался и совершенствовался на протяжении многих лет. Изначально это была одна десятимиллионная часть земной поверхности квадранте, с помощью которой производить измерения было довольно сложно. 20 октября 1983 году метр был определен как длина пути, пройденного светом в вакууме за 1/299,792,458 секунды.
Время
Время – это определенный интервал между двумя событиями. Общепринятой стандартной единицей времени является секунда. Второй был первоначально определен как 1/86,4 среднего периода обращения Земли вокруг своей оси. В 1956 году определение секунды было усовершенствовано и составило 1/31,556 времени, необходимого для полного оборота, который совершает Земля вокруг Солнца.

Масса
Масса – это свойство материи. Ее можно рассматривать как количество вещества, содержащегося в теле. Эта категория определяет воздействие тяжести на тело и сопротивление изменениям в движении. Это сопротивление изменению движения называется инерцией, которая является результатом массы тела. Общепринятой единицей массы является килограмм.
Сила – это производная единица, но очень важный блок в изучении механики. Она часто определяется как действие одного тела на другое, а также может быть или не быть результатом прямого контакта между телами. Гравитационные и электромагнитные силы являются примерами результата такого воздействия. Существует два принципа воздействия, сил, которые стремятся изменить движения системы и которые имеют тенденцию к ее деформации. Основной единицей силы является Ньютон в системе СИ и фунт в английской системе.

Уравнения равновесия
Статика предполагает, что предметы, о которых идет речь, являются абсолютно твердыми. Сумма всех сил, действующих на тело в состоянии покоя, должна быть равна нулю, то есть участвующие силы уравновешивают друг друга и не должно быть никакой тенденции для сил, способных повернуть тело вокруг любой оси. Эти условия являются независимыми друг от друга, и их выражение в математической форме составляет так называемые уравнения равновесия.
Существует три уравнения равновесия, и поэтому только три неизвестные силы могут быть вычислены. Если неизвестных сил будет более трех, это означает, что компонентов в структуре или машине несколько больше, чем требуется для поддержания определенных нагрузок, или что существует больше ограничений, чем необходимо, чтобы удержать тело от перемещения.
Такие ненужные компоненты или ограничения называются избыточными (например, стол на четырех ножках имеет одну избыточную), и система сил является статически неопределенной. Число уравнений, доступных в статике, ограничено, так как любое твердое тело остается твердым при любых условиях, независимо от формы и размера.
Читайте также: