
Основные понятия и законы динамики движения человека реферат
Обновлено: 30.06.2024
Современная физика изучает огромнейшее количество различных процессов в природе. Не все из них поддаются изучению и объяснению. Безусловно многое человеку еще не известно, а если известно то может быть не объяснено сейчас. Тем не менее наука идет вперед и общие (классические) концепции существования природы известны уже сейчас.
Процессы протекающие вокруг нас не всегда поддаются точному объяснению. Как раз на этом этапе перед человеком и встала проблема создания таких моделей и методов познания, которые бы смогли объяснить непознанное. Несомненно в решении этой нелегкой задачи главную роль сыграло не только физическое толкование и применение физики, а пришлось обращаться к математики, к прикладной математики и ряду других точных наук. Результат? Постепенное постижение истины.
В этой работе речь пойдет о динамических законах, на которых, как и на статистических законах, сегодня и держится современная картина мира. Такое деление законов еще раз подтверждает что непознаное, не точно исчисляемое и объясняемое постепенно становится явью с помощью новых концепций. Появление статистических методов в познании, а также развитие теории вероятностей вот новое оружие современного ученого.
Определение динамики
Динамика - греч. слово (dunamiz - сила), введено Лейбницом и служит наименованием учения о движении тел под влиянием сил.
Динамика – это раздел механики, в котором изучается движение тел под действием приложенных к нему сил. В основе динамике лежат три закона Ньютона. Первый закон Ньютона – закон инерции. Всякое тело стремиться сохранить состояние покоя или равномерного прямолинейного движения до тех пор, пока на него не действует сила. Состояние покоя или равномерного прямолинейного движения с точки зрения динамики не различаются (а=0). Масса m является количественной мерой инертности тел. Сила F мера взаимодействия тел. Любое изменение характера движения тела, любое ускорение есть результат действия на тело других тел. Воздействие одного тела на другое может происходить при непосредственном соприкосновении тел или посредством силовых полей. Различают поле тяготения, электрическое и магнитное поля. Рассмотрим основные силы.
Сила, вызванная деформацией тел и препятствующая изменению объема тела, называется силой упругости. Деформация называется упругой, если после снятия внешнего воздействия тело возвращается в исходное состояние. При небольших деформациях растяжения или сжатия х сила упругости прямо пропорциональна деформации и направлена в сторону противоположную ей. F упр = - kx , где k – коэффициент упругости, зависящий от свойств материала и геометрии деформируемого тела. Сила упругости препятствует деформации. Для характеристики упругих свойств вещества вводиться величина E , называемая модулем Юнга. Напряжение , возникающие в твердом теле, равно = F / S , где S площадь поперечного сечения твердого тела, на которое воздействует сила F . Относительная деформация x / l 0, где l 0 – длина тела до деформации пропорциональна напряжению, возникающему в твёрдом теле (закон Гука). (1/ E ) . Физический смысл модуля Юнга состоит в следующем: величина E численно равна напряжению, возникшему в твердом теле при относительной деформации, равной единице. Из физического смысла модуля Юнга следует, что E является большим по величине.
Сила трения. Трение, возникающие при относительном перемещении сухих поверхностей твердого тела, называется сухим трением. Различают три вида сухого трения: трение покоя, скольжения и качения. Если на тело действует сила F , но тело сохраняет состояние покоя (неподвижно относительно поверхности, на которой оно находиться), то это означает, что на тело одновременно действует сила, равная по величине и противоположная по направлению, - сила трения покоя. Сила трения покоя всегда равна по величине и противоположна по направлению внешней действующей силе: F тр.покоя=- F . Сила трения скольжения определяется из соотношения: F тр= kN , где k – коэффициент трения, зависящий от шероховатости и от физических свойств соприкасающихся поверхностей, N – сила реакции опоры, эта сила определяет насколько тело прижато к поверхности, по которой оно движется. Сила трения покоя изменяется по величине от 0 до максимального значения. Сила трения скольжения всегда направлена в сторону, противоположную скорости движения тела относительно поверхности, по которой оно движется. Сила трения качения мала по сравнению с силой трения скольжения. При больших скоростях сопротивление перекатыванию резко увеличивается и тогда следует рассматривать силу трения скольжения.
Все тела притягиваются друг к другу. Для материальных точек (или шаров) закон всемирного тяготения имеет вид F = Gm 1 m 2 / r 2 , где m 1 , m 2 –массы тел, r - расстояние между материальными точками или центрами шаров, G – гравитационная постоянная. Массы, входящие в этот закон, есть мера гравитационного взаимодействия тел. Опыт показывает, что гравитационная и инертная массы равны. Физический смысл G : гравитационная постоянная численно равна силе притяжения, действующей между двумя материальными точками или шарами массами 1 кг, расположенными на расстоянии 1 м друг от друга, G =6,67*10 -11 H *м 2 /кг 2 . Если тело массы m находиться над поверхностью земли на высоте h , то на него действует сила тяготения, равная F = GmM 3 /( R 3 + h )2, где M 3 – масса Земли, R 3 -радиус Земли. В близи земной поверхности на все тела действует сила, обусловленная притяжением, - сила тяжести. Сила тяжести F т определяется силой притяжения земли и тем, что Земля вращается вокруг собственной оси. В связи с малостью угловой скоростью вращения Земли ( =7,27*10 -3 с -1 ) сила тяжести мало отличается от силы тяготения. При h R з ускорение, создаваемое силой тяжести, является ускорением свободного падения: g = G / M 3 / R 3 2 =9,81 м/с 2 . Очевидно, что ускорение свободного падения для всех тел одинаково.
Второй закон Ньютона. Ускорение, с которым движется тело прямо пропорционально силе, действующей на тело, и обратно пропорционально его массе и совпадает по направлению с действующей силой: a = F / m . Если на тело действуют несколько сил, то под F понимают результирующую всех сил. Движение твердого тела зависит не только от приложенных сил, но и от точки их приложения. Можно показать, что ускорение центра тяжести (центра масс) не зависит от точки приложения сил и справедливо уравнение ma цт = F 1 + F 2 + F 3 +. где m – масса тела, a цт – ускорение его центра тяжести. Если тело движется поступательно, то это уравнение полностью описывает движение тела. Третий закон Ньютона. Всякому действий всегда есть равное и противоположно направленное противодействие. Так, если взаимодействуют два тела A и B с силами F 1 и F 2 , то эти силы равны по величине, противоположны по направлению, направлены вдоль одной прямой и приложены к разным телам. Первый закон Ньютона необходим для того, чтобы определить те системы отсчета, в которых справедлив второй закон Ньютона. Системы отсчета, в которых выполняется 1-й закон Ньютона, называются инерциальными, те системы отсчета, в которых 1-й закон не выполняется, - неинерциальными. В связи с важностью изложенного еще раз сформулируем первый закон Ньютона: существуют такие системы отсчета, называемые инерциальными, в которых тело сохраняет состояние покоя или равномерного прямолинейного движения, если на него не действуют силы или действие сил скомпенсировано. Очевидно, что если есть одна инерциальная система отсчета, то любая другая, движущаяся относительно ее равномерно и прямолинейно, является также инерциальной системой отсчета. Импульс тела р – физическая величина, равная произведению массы тела на его скорость: p = mv . Импульс силы – физическая величина, равная произведению силы на промежуток времени, в течении которого эта сила действует, F t . 2-й закон Ньютона может быть сформулирован следующим образом: Изменение импульса тела равно импульсу подействовавшей на него силы, т.е. p = F t . Если на тело действуют несколько сил, то в этом случае берется результирующий импульс всех сил, подействовавших на тело. В проекциях на оси координат x , y , z это уравнение может быть записано в виде p x = F x t , p y = F y t , p z = F z t . Из этого следует, что если, например, F y t =0 и F z t =0, то происходит изменение проекции импульса только на одно направление, и обратно, если изменяется проекция импульса только на одну из осей, то, следовательно, импульс силы, действующей на тело, имеет только одну проекцию, отличную от нуля. Совокупность n воздействующих тел называется системой тел. Введем понятие внешних и внутренних сил. Внешними силами называются силы, действующие на тела системы со стороны тел, не входящих в нее. Внутренними силами называются силы называются силы, возникающие в результате взаимодействия тел, входящих в систему. Рассмотрим систему из двух взаимодействующих тел 1 и 2. На тело 1 действует внешняя сила F внеш1 и внутренняя сила (со стороны второго тела) F внутр1. На второе тело действуют силы F внеш2 и F внутр2 . Изменение импульса тела за промежуток времени равно p 1 = F внутр1 t + F внеш1 t
изменение импульса второго тела: p 2 = F внутр2 t + F внеш2 t . Суммарный импульс системы равен p = p 1 + p 2 . Сложив левые и правые части уравнений, получим изменение суммарного импульса системы: p =( F внутр1 + F внутр2 ) t +( F внеш1 + F внеш2 ) t . По третьему закону Ньютона F внутр1 = - F внутр2, откуда p = F внеш t , где F внеш t – резонирующий импульс внешних сил, действующих на тела системы . Итак, это уравнение показывает, что импульс системы может измениться только под действием внешних сил. Закон сохранения импульса можно сформулировать следующим образом: Импульс системы сохраняется, если результирующий импульс внешних сил, действующих на тела, входящих в систему, равен нулю. Системы, в которых на тела действуют только внутренние силы, называются замкнутыми. Очевидно, что в замкнутых системах импульс системы сохраняется. Однако и в незамкнутых системах в некоторых случаях можно использовать закон сохранения импульса. Перечислим эти случаи.
Внешние силы действуют, но их результирующая равна 0.
Проекция внешних сил на какое-то направление равна 0, следовательно, проекция импульса на это направление сохраняется, хотя сам вектор импульса не остается постоянным.
Внешние силы много меньше внутренних сил ( F внеш F внутр ). Изменение импульса каждого из тел практически равно F внутр t .
Физические явления в механике, электромагнетизме и теории относительности в основном подчиняются, так называемым динамическим закономерностям. Динамические законы отражают однозначные причинно-следственные связи, подчиняющиеся детерминизму Лапласа.
Динамические законы – это законы Ньютона, уравнения Максвелла, уравнения теории относительности.
Классическая механика Ньютона.
Основу механики Ньютона составляют закон инерции Галилея, два закона открытые Ньютоном, и закон Всемирного тяготения, открытый также Исааком Ньютоном.
Согласно сформулированному Галилеем закону инерции, тело сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не выведет его из этого состояния.
Этот закон устанавливает связь между массой тела, силой и ускорением.
Устанавливает связь между силой действия и силой противодействия.
В качестве IV закона выступает закон всемирного тяготения.
Два любых тела притягиваются друг к другу с силой пропорциональной массе сил и обратно пропорциональной квадрату расстояния между центрами тел.
В заключении нужно сказать, что из выше сказанного и описанного все законы динамики применяются сейчас в современной физике, космологии и в ряде других наук, изучающих природу в целом.
Также нельзя утверждать что статистические законы более точные и более применимые в описании явлений вокруг нас по сравнению с динамическими закономерностями и принципами. Ни в коем случае, вед каждая из предложенных к рассмотрению совокупность законов рассматривает абсолютно не идентичные процессы, да и протекают они (процессы) совершенно по разному.
Как мы узнали на прошлой лекции, динамика рассматривает влияние взаимодействия между телами на их механическое движение. При этом надо различать:
• динамику поступательного движения, или динамику материальной точки, и
• динамику вращательного движения, или динамику твердого тела.
Силой называется некоторая физическая величина, выражающая взаимодействие между рассматриваемым телом и другими телами или полями. Поэтому все силы можно разделить на две основных категории: силы, проявляющиеся при непосредственном взаимодействии тел, и силы, которые действуют без непосредственного контакта. Ко второй категории относятся силы от полей: гравитационного, электромагнитного и других.
Ускорение тела пропорционально силе, действующей на тело: F ~ а. Тогда отношение величины силы, действующей на тело, к приобретенному телом ускорению, постоянно для данного тела и называется массой тела: масса = сила/ускорение.
Масса тела является неизменной характеристикой данного тела, не зависящей от его местоположения. Масса характеризует два свойства тела:
• Инерцию: тело изменяет состояние своего движения только под воздействием внешней
силы.
• Тяготение: между телами действуют силы гравитационного притяжения.
Не путать массу тела (мера инертности) с весом тела (силой с которой оно давит на опору). Простой пример -поведение тел в невесомости. Тогда тела не имеют веса (невесомость), но наличие массы не отменяет выполнения законов Ньютона.
Масса характеризует инертность тела при поступательном движении. При вращении инертность зависит не только от массы, но и оттого, как распределена эта масса относительно оси вращения. Чем больше расстояние до оси
 |
вращения, тем больше вклад в инертность тела. Количественной мерой инертности тела при вращательном движении служит момент инерции:
 |
 |
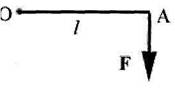
| где Rhh - радиус инерции - среднее расстояние от оси вращения (например, от оси сустава) до материальных точек тела. Сила, приложенная к твердому телу, которое может вращаться вокруг некоторой точки, создает момент силы. Момент силы М равен векторному произведению радиус-вектора г на силу F: |
Если на тело, которое может вращаться вокруг какой-либо точки, действуют одновременно несколько сил, то для сложения моментов этих сил следует воспользоваться правилом сложения моментов.
Другой физической величиной, связывающей движение тела с его инертностью, является импульс тела -произведение массы тела на его скорость p=mv. Для импульса справедлив закон сохранения, т.е. полный импульс замкнутой системы остается постоянным. Полный импульс такой системы представляет векторную сумму всех импульсов.
Для твердого тела вследствие вращения вокруг некоторой оси появляется момент количества движения (угловой момент, момент импульса) - произведение момента инерции тела на его угловую скорость: L = J w. Изменение углового момента (при неизменном моменте инерции тела) может произойти только вследствие изменения угловой скорости и всегда обусловлено действием момента силы.
Центром масс называется точка, где пересекаются линии действия всех сил, не вызывающих вращение тела. В поле тяготения центр масс совпадает с центром тяжести. Положение общего центра масс тела определяется тем, где находятся центры масс отдельных звеньев. Для человека это зависит от его позы, т.е. пространственного положения элементов тела.
В человеческом теле около 70 звеньев, но для биомеханического моделирования чаще всего достаточно 15-звенной модели человеческого тела (например, голова, бедро, стопа, кисть и т.д.). Зная, каковы массы и моменты инерции звеньев тела и где расположены их центры масс, можно решить многие задачи биомеханики, в том числе:
• определить импульс тела;
• определить момент количества движения, при этом надо учитывать, что величины моментов
относительно разных осей неодинаковы;
• оценить, легко или трудно управлять скоростью тела или отдельного звена;
• определить степень устойчивости тела и т.д.
Простой пример применения этой теории. Фигурист может заставить себя вращаться быстрее, обнимая себя руками, или медленнее, расставляя руки в стороны. Во втором случае масса тела остается постоянной, но увеличивается радиус инерции и, следовательно, момент инерции и общая инертность тела.
2. Раздел естественных наук, изучающий на основе моделей и методов механики механические свойства живых тканей, отдельных органов и систем, или организма в целом, а также происходящие в них механические явления.
Исторически для области науки, близкой к описанной, использовалось название ятромеханика (от греч. ιατρο — врач).
Биомеханические исследования охватывают различные уровни организации живой материи: биологические макромолекулы, клетки, ткани (биореология), органы, системы органов, а также целые организмы и их сообщества. Чаще всего, объектом исследования этой науки, является движение животных и человека, а также механические явления в тканях, органах и системах. Под механическим движением понимается движение всей биосистемы в целом, а также движение отдельных частей системы относительно друг друга — деформация системы. Все деформации в биосистемах, так или иначе, связаны с биологическими процессами, которые играют решающую роль в движениях животных и человека. Это сокращение мышцы, деформация сухожилия, кости, связок, фасций, движения в суставах.
Биомеханика человека — наука комплексная, она включает в себя самые разнообразные знания других наук, таких как: механика и математика, функциональная анатомия и физиология, возрастная анатомия и физиология, педагогика и теория физической культуры.
В последние годы число и уровень биомеханических исследований выросло чрезвычайно. Объясняется это, на наш взгляд, двумя обстоятельствами. Во-первых, совершенствованием исследовательских возможностей благодаря появлению ЭВМ новых поколений (большинство исследований по биомеханике основаны на применении ЭВМ). Во-вторых, возросшей заинтересованностью в биомеханических данных представителей многих смежных специальностей – специалистов по роботостроению и манипулятором, космической биологии и медицине, ортопедов и травматологов, нейрофизиологов и, конечно, работников спорта – тренеров, преподавателей, научных работников, врачей.
1 Общие понятия
Движения человека в значительной мере зависят от того, каково строение его тела, и каковы его свойства. Чрезвычайная сложность строения и многообразие свойств тела человека, с одной стороны, делают очень сложными сами движения и управление ими. Но, с другой стороны, они обусловливают необычайное богатство, разнообразие движений, до сих пор недоступное в целом ни одной самой совершенной машине.
Отвлекаясь от деталей анатомического строения - физиологических механизмов управления опорно-двигательным аппаратом, рассматривается упрощённая модель тела человека - биомеханическая система. Она обладает основными свойствами, существенными для выполнения опорно-двигательной функции.
Сточки зрения механики, опорно-двигательный аппарат человека представляет собой механизм, состоящий из сложной системы рычагов, приводимых в действие мышцами. Однако при изучении движений человека и причин, их вызывающих, было бы неправильно ограничиваться только представлениями механики. Необходимо иметь в виду биологическую природу "механизмов" человеческого тела. Анализ деятельности опорно-двигательного аппарата с биологической точки зрения позволяет вскрыть своеобразие устройства и принципа действий "живых механизмов".
2 Кинематическое описание положения тела человека
Описывать положение тела человека можно разными способами. Изложим один из наиболее удобных, разработанный В.Т. Назаровым (1974) и опирающийся на работы Г.В. Коренена (1964) по механике управляемого тела. Положение тела человека в пространстве описывается в этом случае это местом, ориентацией и позой.
Место тела характеризует, в какой части пространства находится в данный момент человек. Чтобы определить место тела, достаточно указать три координаты какой-либо точки тела в неподвижной системе координат. В качестве такой точки обычно удобно выбирать общий центр масс тела, связывая с ним начало другой, подвижной системы координат, оси которой ориентированы так же, как и оси неподвижной системы.
Ориентация тела характеризует его поворот относительно неподвижной системы координат. Поза тела характеризует взаимное расположение звеньев тела относительно друг друга.
Вспомним, как определяются основные плоскости и оси человеческого тела (рис. 1).
Основные плоскости тела ориентируются в системе трех взамино перпендикулярных осей: вертикальной и двух горизонтальных – поперечной и глубинной.
Вертикальная плоскость, проходящая через переднюю срединную и позвоночную линии, а также всякая плоскость, параллельная ей, называются сагиттальными. Они разделяют тело на правую и левую части.
Вертикальная плоскость, проходящая перпендикулярно к сагиттальной, а также всякая плоскость, параллельная ей, называются фронтальными. Они разделяют тело на переднюю и заднюю части.
Горизонтальные плоскости проходят перпендикулярно по отношению к этим двум плоскостям и называются трансверсальными (поперечными). Они разделяют тело на верхнюю и нижнюю части.

К сожалению, основные анатомические плоскости и оси малопригодны для описания многих движений человека. Проблема здесь состоит в том, что с телом надо каким-то образом связать системы координат так, чтобы изменение ориентации этой системы отражало изменение ориентации тела.
3 Кинематика движений в суставах
В анатомии для описания поз и движений в суставах используют термины: сгибание – разгибание, отведение – приведение, пронация – супинация и другие производные от названных. Эта терминология описательная. Она не основана на изучении особенностей движения в отдельных суставах поверхностей при сгибании в тазобедренном и коленном суставах совершенно различны и что особенно важно при биомеханическом анализе движений – не задает систему независимых углов Эйлера, определяющих положение в суставе. Поэтому при последовательном выполнении нескольких движение финальное положение конечности зависит от порядка их выполнения и может оказаться измененным, хотя соответствующее движение не выполнялось.
В основе системы человека лежит утверждение о том, что в суставах тела человека могут выполняться движения только двух типов – кручение (spining)и вращение (swinging).
Моделирование суставов идеальному шарнирами, предполагающее, что любое движение в суставе – это сферическое движение относительно неподвижного центра, упрощает реальную ситуацию. В действительности положение мгновенных осей вращения может меняться. Важность этого обстоятельства и, следовательно, возможность пренебрегать им зависит от изучаемых вопросов. В частности, смещение осей вращения не изменят существенно геометрию масс, но оказывает сильное влияние на плечи сил отдельных мышц.
Таким образом, биомеханическая система - это упрощенная копия, модель тела человека, на которой можно изучать закономерности движений.
4 Биомеханика человека — составная часть прикладных наук, изучающих движение человека
Движения частей тела человека представляют собою перемещения в пространстве и времени, которые выполняются во многих суставах одновременно и последовательно. Движения в суставах по своей форме и характеру очень разнообразны, они зависят от действия множества приложенных сил. Все движения закономерно объединены в целостные организованные действия, которыми человек управляет при помощи мышц. Учитывая сложность движений человека, в биомеханике исследуют и механическую, и биологическую их стороны, причем обязательно в тесной взаимосвязи.
Поскольку человек выполняет всегда осмысленные действия, его интересует, как можно достичь цели, насколько хорошо и легко это получается в данных условиях. Для того чтобы результат движения был лучше, и достичь его было бы легче, человек сознательно учитывает и использует условия, в которых осуществляется движение. Кроме того, он учится более совершенно выполнять движения. Биомеханика человека учитывает эти его способности, чем существенно отличается от биомеханики животных.
Таким образом, биомеханика опорно-двигательного аппарата человека изучает, какой способ и какие условия выполнения действий лучше и как овладеть ими. Общая задача изучения движений состоит в оценке эффективности приложения сил для достижения поставленной цели. Всякое изучение движений, в конечном счете, направлено на то, чтобы помочь лучше выполнять их. Прежде, чем приступить к разработке лучших способов действий, необходимо оценить уже существующие. Отсюда вытекает общая задача биомеханики, сводящаяся к оценке эффективности способов выполнения изучаемого движения. Биомеханика исследует, каким образом полученная механическая энергия движения и напряжения может приобрести рабочее применение. Рабочий эффект измеряется тем, как используется затраченная энергия. Для этого определяют, какие силы совершают полезную работу, каковы они по происхождению, когда и где приложены. То же самое должно быть известно о силах, которые производят вредную работу, снижающую эффективность полезных сил. Такое изучение дает возможность сделать выводы о том, как повысить эффективность действия. При решении общей задачи биомеханики возникают многочисленные частные задачи, не только предусматривающие непосредственную оценку эффективности, но и вытекающие из общей задачи и ей подчиненные.
Метод биомеханики — системный анализ и системный синтез движений на основе количественных характеристик, в частности кибернетическое моделирование движений. Биомеханика, как наука экспериментальная, эмпирическая, опирается на опытное изучение движений. При помощи приборов регистрируются количественные характеристики, например траектории скорости, ускорения и другие, позволяющие различать движения, сравнивать их между собой. Рассматривая характеристики, мысленно расчленяют систему движений на составные части — устанавливают ее состав. В этом — суть системного анализа.
Система движений как целое — не просто сумма ее составляющих частей. Части системы объединены многочисленными взаимосвязями, придающими ей новые, не содержащиеся в ее частях качества (системные свойства). Необходимо представлять это объединение, устанавливать способ взаимосвязи частей в системе — ее структуру. В этом — суть системного синтеза. Системный анализ и системный синтез неразрывно связаны друг с другом, они взаимно дополняются в системно-структурном исследовании.
При изучении движений в процессе развития системного анализа и синтеза в последние годы все шире применяется метод кибернетического моделирования — построение управляемых моделей (электронных, математических, физических и др.) движений и моделей тела человека.
5 Методы исследования в биомеханике опорно-двигательного аппарата
В настоящее время биомеханика опорно-двигательного аппарата обладает значительным арсеналом методов исследования локомоторной функции, как в статике, так и в динамике, причем изучается не только внешняя картина движения, но и механизмы управления, жизнеобеспечение организма, что дает возможность выявить целый комплекс параметров, характеризующих опорно-двигательный образ. В это понятие включаются не только внешние (механические) проявления движения и реакций окружающей среды, но и условия организации управления движениями, согласованная деятельность всех органов и систем организма. Получаемая в результате биомеханических исследований информация служит основой для определения нормы, позволяет количественно определить степень нарушения локомоторной функции при различных патологических состояниях. Биомеханические исследования достаточно широко используются не только в клинической медицине (функциональная диагностика, ортопедия, травматология, протезирование), но и в спорте, и при разработке различных антропоморфных механизмов (роботы, манипуляторы), и при решении других прикладных задач. Методическая база биомеханических исследований постоянно совершенствуется, используя новейшие достижения науки.
Методы исследования, получившие наибольшее распространение в настоящее время, в клинической биомеханике могут быть классифицированы следующим образом:
I. Соматометричские: антропометрия, фотограмметрия, рентгенография.
II. Кинезиологические: оптические, потенциометрия, электроподография, тензометрия, ихнография.
III. Клинико-физиологические: калориметрия, электромиография, электроэнцефалография и другие методы функциональной диагностики.
Таким образом, биомеханика опорно-двигательного аппарата человека изучает, какой способ и какие условия выполнения действий лучше и как овладеть ими. Общая задача изучения движений состоит в оценке эффективности приложения сил для достижения поставленной цели. Всякое изучение движений, в конечном счете, направлено на то, чтобы помочь лучше выполнять их. Ежедневно мы сталкиваемся с многочисленными ситуациями, когда необходимо придать телу правильную позу, а суставам и мышцам соответствующее положение, в котором они могли бы наилучшим образом растягиваться и выполнять необходимую работу. Некоторые привычки, например положение во время сна или телефонного разговора, заслуживают особого внимания и изучения как возможные источники появления и усугубления головной боли и боли в шее у отдельных пациентов при наличии у них миофасциальных триггерных точек в мышцах головы и шеи.
1. Биомеханика двигательного аппарата человека/Зациорский В.М., Аруин А.С., Селуяиов В.Н. – М.: Физкультура и спорт, 1981. – 143 с., ил. – (Наука - спорту).
3. Клиническая биомеханика/Под ред. В. И. Филатова. — Л.: Медицина, 1980.— 200 с.
5. Н. А. Бернштейн. Физиология движений и активность. М.: Наука, 1990. С. 373—392.
Динамика – это раздел теоретической механики, в котором изучают механическое движение материальной точки, абсолютно твердого материального тела и системы материальных точек под действием приложенных к ним сил.
Материальной точкой называют тело, имеющее массу, размерами которого в конкретных практических задачах можно пренебречь.
Абсолютно твердым материальным телом называют совокупность материальных точек, заполняющих определенный объем в пространстве, причем расстояние между двумя любыми точками считают неизменным.
Системой материальных точек называют совокупность материальных точек, положения и движения которых взаимосвязаны. Масса – это физическая константа объекта (материальной точки или тела), которая является мерой его инертных и гравитационных свойств, причем инертная и гравитационная массы с достаточной для практики точностью совпадают.
Векторную меру механического взаимодействия тел называют силой. Массу измеряют в килограммах [кг], а силу – в Ньютонах
[Н], при этом сила в 1 Н сообщает материальной точке массой в 1 кг ускорение, равное 1 м/с
Первый закон Ньютона ( закон инерции ) – В инерциальной системе отсчета изолированная точка сохраняет состояние покоя или равномерного прямолинейного движения. Под изолированной понимают точку, на которую не действуют никакие силы со стороны других материальных объектов.
Второй закон Ньютона ( основной закон динамики ) – В инерциальной системе отсчета связь между массой точки m , силой P, дей-
ствующей на точку, и ускорением a, сообщаемым точке этой силой, определяется зависимостью ma=P.
Третий закон Ньютона ( закон равенства действия и противодействия ) – Силы, с которыми взаимодействуют две материальные
точки или два материальных тела равны по величине, противоположны по направлению и имеют общую линию действия.
Четвертый закон ( принцип независимости действия сил ) – ускорение, приобретаемое материальной точкой при действии на нее
системы сил, равно геометрической сумме ускорений, сообщаемых точке каждой силой в отдельности. Иными словами, ускорение точки будет таким, как если бы его вызвала равнодействующая этой системы сил.
Читайте также: