
Мехатронные системы в медицине реферат
Обновлено: 02.07.2024
ВВЕДЕНИЕ 3
1. Понятие мехатроники. Определение мехатронного
устройства. 5
1.1 Признаки и состав мехатронных систем 8
2. Примеры мехатронных систем в военной технике для
систем вооружения 9
2.1 Робот-разведчик Минатома РФ 11
2.2 Специальные мобильные роботы "Вездеход ТМ-3" и "Варан" 13
2.3 Мехатронный робот-станок "РОСТ 300" 15
3. Перспективы дальнейшего применения мехатронных систем
в рассматриваемой области 18
ЗАКЛЮЧЕНИЕ 25
ЛИТЕРАТУРА 27
Использование Интернет-технологий в мехатронике и робототехнике открывает новые перспективы в развитии распределенных систем управления и сбора данных. Задачи дистанционного мониторинга экспериментов и контроля удаленных технических систем с помощью Интернета могут быть выполнены с минимальными затратами практически в любой точке мира за счет широкого распространения и доступности глобальной сети.
Дистанционное управление мехатронными объектами с использованием Интернета подразумевает не только сбор данных при помощи информационно-измерительной аппаратуры, но и подачу управляющих воздействий на исполнительные элементы различных типов. Эта задача для систем вооружения является, пожалуй, наиболее перспективной, но вместе с тем сложной для практической реализации. Анализ современных тенденций, а также ряда реально осуществленных проектов показывает, что Интернет является достаточно эффективным и удобным средством организации дистанционного управления техническими объектами, преимуществами которого являются:
- возможность организовать дистанционное управление реальными объектами и экспериментами практически из любой точки мира;
- снижение затрат на создание специализированных каналов связи;
- возможность организации доступа широкого круга специалистов экспертов, территориально удаленных друг от друга, к уникальному оборудованию в режиме реального времени.
Перспективные области применения Интернет-робототехники прежде всего для систем вооружения включают:
- дистанционное управление в условиях агрессивной окружающей среды (мобильные роботы);
- астрономия (создание роботизированных автономных телескопов);
- дистанционное образование (создание вир?
Нет нужной работы в каталоге?

Сделайте индивидуальный заказ на нашем сервисе. Там эксперты помогают с учебой без посредников Разместите задание – сайт бесплатно отправит его исполнителя, и они предложат цены.
Цены ниже, чем в агентствах и у конкурентов
Вы работаете с экспертами напрямую. Поэтому стоимость работ приятно вас удивит
Бесплатные доработки и консультации
Исполнитель внесет нужные правки в работу по вашему требованию без доплат. Корректировки в максимально короткие сроки
Если работа вас не устроит – мы вернем 100% суммы заказа
Техподдержка 7 дней в неделю
Наши менеджеры всегда на связи и оперативно решат любую проблему
Строгий отбор экспертов

Требуются доработки?
Они включены в стоимость работы ![]()


Работы выполняют эксперты в своём деле. Они ценят свою репутацию, поэтому результат выполненной работы гарантирован
В статье рассмотрены вопросы изучения динамики биомехатронного устройства для реабилитации больных с нарушениями двигательной функции нижних конечностей. Предложена схема устройства для механотерапии, проведено математическое моделирование динамического поведения аппарата, обеспечивающего повышение эффективности программ по реабилитации. В работе использованы методы теоретической и прикладной механики, математического моделирования и управления. В ходе исследования был теоретически обоснован принцип движения реабилитационных устройств, основанный на биомеханических возможностях человека, соответствующий фазам движения конечности. В результате анализа динамической модели мехатронной системы выявлена нелинейная зависимость сил, действующих на нижнюю конечность. Рассматриваемое устройство может быть использовано для реабилитации пациентов в кинезиологии и физиотерапии, так как особенности конструкии устройства позволяют нагружать нижнюю конечность посредством упражнений, стимулирующих мышечную активность, улучшая функции и предотвращая неблагоприятные эффекты от вынужденной длительной гиподинамии.

1. Головин В.Ф., Архипов М.А., Журавлев В.В. Биомехатроника в медицинской робототехнике // Мехатроника, автоматизация, управление. – 2012. – № 12. – С. 45–48.
2. Кичайкина Н.Б. Биомеханика физических упражнений / Н.Б. Кичайкина, И.М. Козлов, А.В. Самсонова: учебно-методическое пособие. – СПб, 2008.– 164 с.
3. Понедельченко М.С. Разработка и проектирование конструкции шагающего робота // Управляемые вибрационные технологии и машины: сборник научных статей Х научно-технической конференции Вибрация-2012. – Ч. 2. – С. 134–144.
5. Yatsun S. Development bioengineering mechatronic module for exoskeleton human leg / S. Yatsun, A. Rukavitsyn // Nauka i Studia, 2013. – NR 17 (85), Przemyśl (Польша). P. 39–46.
Увеличение продолжительности жизни, урбанизация, изменение характера питания, загрязнение воды и атмосферы – эти и многие другие факторы привели к глубоким изменениям в состоянии популяции. На рубеже второго и третьего тысячелетий инсульт стал одной из основных проблем здравоохранения. Каждый год в мире эта патология поражает около 16 млн человек, из них 5,7 млн умирают, и столько же становятся инвалидами. В Российской Федерации (40–50 %) 1-е место в структуре патологии занимает инсульт, являющийся причиной инвалидности. К сожалению, только 20 % лиц, перенесших инсульт, возвращаются к труду. При этом потери государства от одного больного, получившего инвалидность, составляют порядка 1247000 рублей в год.
Это обусловливает важность проблемы профилактики данного заболевания и реабилитации больных, перенесших инсульт. Наиболее частым последствием, приводящим к инвалидности, является нарушение двигательных функций. По данным регистра мозгового инсульта НИИ неврологии РАМН, к концу острого периода двигательные нарушения наблюдаются у 81,2 % из 100 выживших больных [2].
В последнее время в результате развития вычислительной техники и мехатроники значительно увеличилось число биомехатронных тренажёров для лечебных и реабилитационных целей [1]. Медицинские потребности в таком оборудовании велики. Они связаны с увеличением среднего возраста населения в России и с ростом числа случаев инсульта. Другим источником потребностей в реабилитационных устройствах являются случаи спортивных, автомобильных или военных травм спинного мозга.
Для использования ранних программ реабилитации людей с нарушениями двигательных функций нижних конечностей целесообразно применять современные механотерапевтические устройства, разрабатываемые на основе последних инновационных достижений в области медицины, биоинженерии, мехатроники, компьютерной техники, механики, математики и других фундаментальных дисциплин [5].
Цель: проведение математического моделирования динамического поведения биоинженерного мехатронного устройства, обеспечивающего повышение эффективности реабилитационных программ у больных с нарушениями функций опорно-двигательного аппарата.
Материалы и методы исследования
Поставленные задачи решаются с применением методов теоретической и прикладной механики, теории робототехнических систем, математического моделирования и систем управления.
Результаты исследования и их обсуждение
Исследуемое нами устройство для механотерапии нижних конечностей человека с интегрированным в него мехатронным модулем, представляет собой систему, состоящую из шарнирно закреплённых подвижных звеньев, комбинированного привода линейного перемещения с датчиком угла поворота, датчика нагрузки на опорную пяту и концевых предохранительных выключателей. Управление приводами осуществляется посредством микропроцессорного блока [4].
На рис. 1 представлен коленный мехатронный модуль, включающий в себя жесткое основание 1, которое при помощи гибких эластичных ремней (2) крепится к бедру человека. К нижней части основания (1) присоединена с образованием вращательной кинематической пары поворотная пластина (3), которая с помощью гибких эластичных ремней (2) крепится к голени человека. В верхней части основания (1) присоединен привод поступательного движения (4), выходной вал которого соединен с поворотной пластиной (3) при помощи сферического шарнира. В нижней части бедра, в районе медиальной широкой мышцы, крепится датчик биологического сигнала, соединенный с системой компьютерного управления.
Работа устройства осуществляется следующим образом. Для принудительного совершения движения в коленном суставе из системы компьютерного управления поступает сигнал в виде питающего напряжения, подаваемого на привод поступательного движения (4). Величина напряжения пропорциональна величине требуемого выходного усилия коленного модуля. При этом выходной вал привода (4) совершает поступательное перемещение в необходимом направлении, приводя в движение поворотную пластину (3), которая также совершает угловое перемещение вместе с голенью. Затем, в соответствии с программой управления, выходной вал привода (4) движется в обратном направлении, и поворотная пластина вместе с голенью возвращается в исходное положение. Затем цикл повторяется.
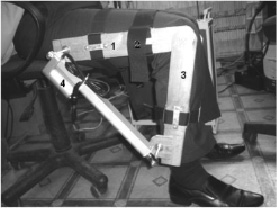
Рис. 1. Коленный мехатронный модуль в составе реабилитационного устройства для механотерапии

Рис. 2. График изменения межзвенного угла
Модуль позволяет осуществлять принудительное сгибание-разгибание нижней конечности в коленном суставе, обеспечивая постоянный контроль естественных движений. В ходе исследования была проведена оценка конструктивных решений мехатронного модуля с целью оптимизации по весовым, энергетическим, эргономическим и другим эксплуатационно-техническим показателям, обеспечивающим выполнение заданных требований. Были выявлены значения показателей, полученные в ходе исследования, и осуществлен прогноз их изменения в процессе эксплуатации.
На рис. 2 представлен график изменения межзвенного угла α, полученный при математическом моделировании 1 и в экспериментах 2.
Во время экспериментов, представленных на рис. 2, максимальная скорость перемещения нижней точки поворотной пластины составляет примерно 25 мм/c, что несколько меньше (12 %), чем при математическом моделировании этого процесса. Уменьшив продолжительность фазы двойной опоры, можно увеличить скорость перемещения исполнительного звена мехатронного модуля.
В процессе передвижения учитывалась деформируемость звеньев (костей), из которых состоит опорно-двигательный аппарат. Максимальные ускорения звеньев снижаются почти на порядок, так как при ходьбе происходит рекуперация энергии. Кинетическая энергия движения при постановке ноги не полностью диссипатирует, а частично переходит в потенциальную энергию упруго деформирующихся звеньев, которая, в свою очередь, при смене опорной ноги частично преобразуется в кинетическую энергию при отталкивании.
Особенности конструкции устройства позволяют нагружать нижнюю конечность посредством упражнений, стимулирующих мышечную активность, улучшая функции и предотвращая неблагоприятные эффекты от вынужденной длительной гиподинамии. Программное обеспечение контролирует пациента и оптимизирует прогресс физиотерапии. Предусмотрен широкий набор физических упражнений с различными уровнями сложности для оптимизации индивидуальной нагрузки. Разновариантные комплексы упражнений позволяют существенно расширить доступный объем движений. Разработанное программное обеспечение регистрирует движения нижней конечности, позволяя врачу в реальном времени контролировать состояние пациента и процесс механотерапии.
Разработанный мехатронный коленный модуль может применяться отдельно для восстановления функции тугоподвижных суставов. При этом используется методика статического прогрессивного вытяжения. В основе методики лежит механическое растяжение тугоподвижного сустава и его последующая релаксация, чередуемые каждые 5–8 минут в течение 30–40 минут. В отличие от динамического вытяжения с помощью других методик данный модуль позволяет получать эффективные результаты. Методика проста в использовании: пациент имеет возможность самостоятельно регулировать нагрузку, ориентируясь на свои ощущения. Разработанный биоинженерный мехатронный модуль может использоваться в суставах с ограниченным уровнем подвижности в тех случаях, когда невозможно пассивное движение – в том числе при болезненных движениях в суставах.
Приводы мехатронных модулей разработанного реабилитационного устройства обладают стабильной угловой скоростью, которая предотвращает адгезии и контрактуры. Особенности конструкции устройства минимизируют переднее большеберцовое смещение и обеспечивают минимальную нагрузку на коленный сустав, осуществляя его синхронную разработку, а также поддерживает регулировку движений голеностопного сустава для полного пассивного восстановления подвижности нижней конечности.
Меры безопасности включают контроль всех операций блоком управления, который изменяет направление движения при выключении и включении, а также изменяет нагрузку при сопротивлении пациента движениям аппарата или когда движение устройства по каким-либо причинам затруднено. Данное устройство реализует принудительное движение.
Выводы
Таким образом, в ходе исследования был теоретически обоснован принцип движения реабилитационных устройств, основанный на биомеханических возможностях человека и соответствующий фазам движения конечности. В результате проведенного анализа динамической модели мехатронной системы выявлена нелинейная зависимость сил, действующих на нижнюю конечность человека, и установлены законы управляющего напряжения, позволяющие уменьшить ускорение и снижать уровень негативного влияния на состояние пациента. Отклонение экспериментальных данных от значений, полученных в ходе математического моделирования, связано с погрешностью измерений и составляет в среднем 8–10 %.
Работа выполнена в рамках Гранта РНФ № 14-39-00008.
Рецензенты:
Сферы применения мехатронных систем
Описание: Сферы применения мехатронных систем. К основным преимуществам мехатронных устройств по сравнению традиционными средствами автоматизации следует отнести: относительно низкую стоимость благодаря высокой степени интеграции унификации и стандартизации всех элементов и интерфейсов; высокое качество реализации сложных и точных движений вследствие применения методов интеллектуального управления; высокую надежность долговечность и помехозащищенность; конструктивную компактность модулей вплоть до миниатюризации и микромашинах улучшенные.
Дата добавления: 2015-01-30
Размер файла: 7.91 KB
Работу скачали: 45 чел.
Поделитесь работой в социальных сетях
Если эта работа Вам не подошла внизу страницы есть список похожих работ. Так же Вы можете воспользоваться кнопкой поиск
Лекция 4. Сферы применения мехатронных систем.
К основным преимуществам мехатронных устройств по сравнению традиционными средствами автоматизации следует отнести:
относительно низкую стоимость благодаря высокой степени интеграции, унификации и стандартизации всех элементов и интерфейсов;
высокое качество реализации сложных и точных движений вследствие применения методов интеллектуального управления;
высокую надежность, долговечность и помехозащищенность;
конструктивную компактность модулей (вплоть до миниатюризации и микромашинах),
улучшенные массогабаритные и динамические характеристики машин вследствие упрощения кинематических цепей;
- возможность комплексирования функциональных модулей в сложные мехатронные системы и комплексы под конкретные задачи заказчика.
Объемы мирового производства мехатронных устройств ежегодно увеличиваются, охватывая все новые сферы. Сегодня мехатронные модули и системы находят широкое применение в следующих областях:
станкостроение и оборудование для автоматизации технологических
процессов;
робототехника (промышленная и специальная);
авиационная, космическая и военная техника;
автомобилестроение (например, антиблокировочные системы тормозов,
системы стабилизации движения автомобиля и автоматической парковки);
нетрадиционные транспортные средства (электровелосипеды, грузовые
тележки, электророллеры, инвалидные коляски);
офисная техника (например, копировальные и факсимильные аппараты);
элементы вычислительной техники (например, принтеры, плоттеры,
дисководы);
медицинское оборудование (реабилитационное, клиническое, сервисное);
бытовая техника (стиральные, швейные, посудомоечные и другие
машины);
микромашины (для медицины, биотехнологии, средств связи и
телекоммуникации);
контрольно-измерительные устройства и машины;
фото- и видеотехника;
тренажеры для подготовки пилотов и операторов;
- шоу-индустрия (системы звукового и светового оформления).
Безусловно, этот список может быть расширен.
Стремительное развитие мехатроники в 90-х годах как нового научно-технического направления обусловлено тремя основным факторами:
новые тенденции мирового индустриального развития;
развитие фундаментальных основ и методологии мехатроники (базовые
научные идеи, принципиально новые технические и технологические
решения);
активность специалистов в научно-исследовательской и образовательной
сферах.
Современный этап развития автоматизированного машиностроения в нашей стране происходит в новых экономических реалиях, когда стоит вопрос о технологической состоятельности страны и конкурентоспособности выпускаемой продукции.
Можно выделить следующие тенденции изменения в ключевых требованиях мирового рынка в рассматриваемой области:
необходимость выпуска и сервиса оборудования в соответствии с
международной системой стандартов качества, сформулированных в
стандарте ISO 9000 ;
интернационализация рынка научно-технической продукции и, как
следствие, необходимость активного внедрения в практику форм и методов
международного инжиниринга и трансфера технологий;
повышение роли малых и средних производственных предприятий в
экономике благодаря их способности к быстрому и гибкому реагированию
на изменяющиеся требования рынка;
- бурное развитие компьютерных систем и технологий, средств телекоммуникации (в странах ЕЭС в 2000 году 60% роста Совокупного
Национального Продукта произошло именно за счет этих отраслей);
прямым следствием этой общей тенденции является интеллектуализация
систем управления механическим движением и технологическими
функциями современных машин.
В качестве основного классификационного признака в мехатронике представляется целесообразным принять уровень интеграции составляющих элементов. В соответствии с этим признаком можно разделять мехатронные системы по уровням или по поколениям, если рассматривать их появление на рынке наукоемкой продукции исторически мехатронные модули первого уровня представляют собой объединение только двух исходных элементов. Типичным примером модуля первого поколения может служить "мотор-редуктор", где механический редуктор и управляемый двигатель выпускаются как единый функциональный элемент. Мехатронные системы на основе этих модулей нашли широкое применение при создании различных средств комплексной автоматизации производства (конвейеров, транспортеров, поворотных столов, вспомогательных манипуляторов).
Мехатронные модули второго уровня появились в 80-х годах в связи с развитием новых электронных технологий, которые позволили создать миниатюрные датчики и электронные блоки для обработки их сигналов. Объединение приводных модулей с указанными элементами привела к появлению мехатронных модулей движения, состав которых полностью соответствует введенному выше определению, когда достигнута интеграция трех устройств различной физической природы: механических, электротехнических и электронных. На базе мехатронных модулей данного класса созданы управляемые энергетические машины (турбины и генераторы), станки и промышленные роботы с числовым программным управлением.
Развитие третьего поколения мехатронных систем обусловлено появлением на рынке сравнительно недорогих микропроцессоров и контроллеров на их базе и направлено на интеллектуализацию всех процессов, протекающих в мехатронной системе, в первую очередь процесса управления функциональными движениями машин и агрегатов. Одновременно идет разработка новых принципов и технологии изготовления высокоточных и компактных механических узлов, а также новых типов электродвигателей (в первую очередь высокомоментных бесколлекторных и линейных), датчиков обратной связи и информации. Синтез новых прецизионных, информационных и измерительных наукоемких технологий дает основу для проектирования и производства интеллектуальных мехатронных модулей и систем.
В дальнейшем мехатронные машины и системы будут объединяться и мехатронные комплексы на базе единых интеграционных платформ. Цель создания таких комплексов - добиться сочетания высокой производительности и одновременно гибкости технико-технологической среды за счет возможности ее реконфигурации, что позволит обеспечить, конкурентоспособность и высокое качество выпускаемой продукции.
Современные предприятия, приступающие к разработке и выпуску мехатронных изделий, должны решить в этом плане следующие основные задачи:
- структурная интеграция подразделений механического, электронного и информационного профилей (которые, как правило функционировали автономно и разобщенно) в единые проектные и производственные коллективы;
- подготовка "мехатронно-ориентированных" инженеров и менеджеров, способных к системной интеграции и руководству работой узкопрофильных специалистов различной квалификации;
- интеграция информационных технологий из различных научно-технических областей (механика, электроника, компьютерное управление) в единый инструментарий для компьютерной поддержки мехатронных задач;
- стандартизация и унификация всех используемых элементов и процессов при проектировании и производстве МС.
Решение перечисленных проблем зачастую требует преодоления сложившихся на предприятии традиций в управлении и амбиций менеджеров среднего звена, привыкших решать только свои узкопрофильные задачи. Именно поэтому средние и малые предприятия которые могут легко и гибко варьировать свою структуру, оказываются более подготовленными к переходу на производство мехатронной продукции.

Гусь-Хрустальный, 2020
Содержание
1. ОСНОВНЫЕ ПОНЯТИЯ О МЕХАТРОННИКЕ
2. СФЕРЫ ПРИМЕНЕНИЯ МЕХАТРОНИКИ И РОБОТОТЕХНИКИ
2.1 Строительная робототехника
2.2 Промышленная робототехника
2.3 Бытовая робототехника
2.4 Медицинская робототехника
2.5 Авиационная робототехника
2.6 Военная робототехника
2.7 Космическая робототехника
2.8 Подводная робототехника
Сегодня мехатронные модули и системы находят широкое применение в следующих областях: станкостроение и оборудование для автоматизации технологических процессов; робототехника (промышленная и специальная); авиационная, космическая и военная техника; автомобилестроение (например, антиблокировочные системы тормозов, системы стабилизации движения автомобиля и автоматической парковки); нетрадиционные транспортные средства (электровелосипеды, грузовые тележки, электророллеры, инвалидные коляски); офисная техника (например, копировальные и факсимильные аппараты); элементы вычислительной техники (например, принтеры, плоттеры, дисководы); медицинское оборудование (реабилитационное, клиническое, сервисное); бытовая техника (стиральные, швейные, посудомоечные и другие машины); микромашины ( для медицины, биотехнологии, средств связи и телекоммуникации); контрольно-измерительные устройства и машины; фото- и видеотехника; тренажеры для подготовки пилотов и операторов; шоу-индустрия (системы звукового и светового оформления). Безусловно, этот список может быть расширен.
Актуальность: В XXI веке мехатроника и робототехника используется во всех видах промышленности, строительства, быта, авиации, особенно в экстремальных сферах деятельности человечества таких, как военная, космическая и подводная.
Цель: рассмотрение видов и типов мехатронных и робототехнических систем, а также сферы их использования в современном мире.
Объект: мехатронные и робототехнические системы.
Предмет: мехатроника и робототехника в современной жизни.
Для достижения выбранной цели поставлены следующие задачи:
1. Дать основные понятия о мехатронике
2. Рассмотреть сферы применения мехатроники и робототехники
3. Охарактеризовать способы применения мехатроники и робототехники в различных сферах
Методологической базой для написания работы послужили общенаучные методы исследования: обобщения, анализа и синтеза, систематизации, а также изучение научной и учебной литературы, технических справочников, самоучителей, материалы различных Интернет-ресурсов.
1. ОСНОВНЫЕ ПОНЯТИЯ О МЕХАТРОННИКЕ
Мехатроника — область науки и техники, основанная на синергетическом объединении узлов точной механики с электронными, электротехническими и компьютерными компонентами, обеспечивающими проектирование и производство качественно новых механизмов, машин и систем с интеллектуальным управлением их функциональными движениями.
Мехатроника опирается на такие дисциплины:
Выделяют строительную, промышленную, бытовую, медицинскую, авиационную и экстремальную (военную, космическую, подводную) мехатронику.
В мехатронике соединяются механика, система управления и искусственный интеллект, поэтому она является важнейшим направлением научно-технического прогресса. Мехатронику требуются знания вышеперечисленных дисциплин, в результате мехатроник, в отличие от узкого специалиста, обладает широким кругозором и системным мышлением.
Робот – устройство, управляемое с помощью электронной платы или компьютера, который можно запрограммировать на выполнение определенных операций. Он является электромеханическим, гидравлическим, пневматическим устройством или их сочетанием, в зависимости от сферы применения, предназначенный для замены человека или облегчения его труда.
Управление мехатроными системами делится на:
· телеуправление – то есть с участием человека;
Существует три класса устройств мехатронике, это сборные устройства, манипуляторы и уже готовые работы.
Системы управления устройств строятся на том же техническом базисе, что и все другие автоматические устройства. В отличие от автоматов робот не просто следует заранее вложенному в него алгоритму, а способен воспринимать внешние сигналы и в соответствии с ними адаптировать свои действия в изменяющейся ситуации. Важно понимать, что на данный момент ещё нет универсальных роботов, которых можно было бы использовать для любой задачи. Инженеры-изобретатели разрабатывают и программируют роботов отдельно для каждой конкретной задачи.
По уровню применения робототехника подразделяется на:
2. СФЕРЫ ПРИМЕНЕНИЯ МЕХАТРОНИКИ И РОБОТОТЕХНИКИ
2.1 Строительная робототехника
Строительная робототехника, как это понятно из её названия, связана со сферой строительства. То есть работа идёт над разработкой роботов, которых можно будет использовать как при строительстве различных объектов, так и, что интересно, при их разрушении. Трудоёмкость обоих этих процессов высока, да и технологичность каждой операции процесса строительства должна быть на должном уровне. Поэтому использование роботов в этой сфере поможет соблюдать установленные технические стандарты и требования, а также может помочь максимально исключить ошибки, допускаемые из-за человеческого фактора.
2.2 Промышленная робототехника
Промышленные роботы уже активно используются на заводах и фабриках, при производстве игрушек, чайников, мотоциклов, конфет, а также в производстве действительно сложных изделий, например, автомобилей. Роботы могут без помощи человека варить металл, штамповать, собирать по частям готовые продукты, всё это происходит благодаря особым конструкциям и программам, которые определяют функционал каждого робота. Говоря иными, а именно научными словами, такие устройства предназначены для автоматизации производства — изготовления чего-либо без помощи человека.
2.3 Бытовая робототехника
Роботы для использования в домохозяйствах, включая персональных роботов, как правило, узкоспециализированные - каждый под какой-то один вид деятельности. В перспективе можно ожидать появления многофункциональных, универсальных роботов, способных выполнять различные виды деятельности. Жаргонное название - "домашники". Отличаются многообразием видов, в зависимости от назначения. Они могут быть: помощниками для пожилых людей, дворецкими, кухонными работниками, охранниками и так далее.
В данное время всё усиливается спрос на умные дома, они позволяют быстро реконфигурировать одно и то же помещение в соответствие с текущими задачами в режиме реального времени. Электроприводы, повинующиеся заложенной программе или нажатию кнопок в приложении, выдвигают из недр робо-комплекса кроватили или столы, настраивают конфигурацию шкафов и полок. А в роботизированном доме даже перегородки между комнатами могут передвигаться так, как нужно сейчас хозяину. Как в ручном режиме, так и автоматически, например, в таком доме занавески раздвинутся как раз тогда, когда хозяин встает, одновременно включится, например, кофеварка.
2.4 Медицинская робототехника
Главной целью развития медицинской робототехники является высокая точность и повышение эффективности лечения, уменьшение рисков нанесения вреда здоровью человека. В настоящее время роботы играют колоссальную роль в развитии современной медицины. Они способствуют точной работе при операциях, помогают провести диагностику и поставить правильный диагноз. Заменяют отсутствующие конечности и органы, восстанавливают и улучшают физические возможности человека, снижают время на госпитализацию, обеспечивают удобство, быстроту реагирования и комфорт, экономят финансовые затраты на обслуживание. Вот некоторые роботы, применяемые в медицине: роботы хирурги, роботизированные протезы, нанороботы и многие другие медицинские роботы.
2.5 Авиационная робототехника
Авиация в плане роботизации не отстаёт от других сфер деятельности человека.
В нынешнее время очень популярным являются беспилотные летательные аппараты (БПЛА). БПЛА - беспилотный летательный аппарат военного назначения, разновидность военного робота. В задачу этих автономных систем, созданных для полёта, входит выполнение миссий, потенциально опасных для человека.
Также в авиации широко используются промышленные роботы, задействованные в производстве, обслуживании и ремонте самолётов.
2.6 Военная робототехника
К группе военных роботов относят всевозможные беспилотные разведчики, машины для минирования и разминирования местности. Был разработан даже настоящий робот-медик. Называется этот робот Bloodhound, а предназначен он для оказания помощи раненым, к которым невозможно приблизиться врачам из-за сильного огня со стороны противника. Bloodhound оснащён видеокамерами, радиостанцией с микрофоном и динамиками, а также стетоскопом. Все эти элементы робота позволяют медикам дистанционно управлять им, проводить первичный осмотр раненого и даже беседовать с ним. После постановки диагноза Bloodhound может остановить кровотечение (например, наложить повязку на рану) и сделать назначенный укол, который позволит раненому дождаться эвакуации. Благодаря таким роботам можно спасти огромное количество человеческих жизней.
В 2004 российские инженеры создали робота, способного обнаруживать и обезвреживать взрывные устройства. Такой робот способен проникать и доставлять в труднодоступные зоны средства наблюдения и разведки, а также осматривать подозрительные объекты и в случае необходимости осуществлять их транспортировку до места назначения или разминирование. Робот может работать индивидуально или в группе таких же машин.
2.7 Космическая робототехника
Космороботы – это роботы, приспособленные работать в космическом пространстве. Преимущество космических роботов перед человеком заключается в том, что они могут работать в крайне неблагоприятных условиях и обходиться без каких-либо ресурсов, так как в большинстве случаев они работают на солнечных батареях. Также гораздо легче будет пережить потерю такого робота, чем гибель астронавта. Обычно, задача косморобота заключается в проведении какой-нибудь научной деятельности. Вообще-то, тоже самое может сделать и обычный робот, работающий на земной поверхности, но к космороботу есть несколько основных требований, которым он должен соответствовать.
· функционировать в сложных условиях враждебной среды;
· весить как можно меньше;
· потреблять мало энергии и иметь долгий срок службы;
· работать в автоматическом режиме;
· обладать чрезвычайной надежностью;
Для того, чтобы соответствовать всем этим требованиям, учёные создают все новые и новые устройства, механизмы, приводы, микроконтроллеры, обладающие высокой прочностью и использующим как можно меньше энергии. Эксперты подсчитали, что отправление на Марс человека будет стоить примерно 200-300 миллиардов долларов, при том, что это будет безвозвратное отправление. Еще придется потратить несколько месяцев на психологическую адаптацию участников экспедиции. А отправка корабля, на борту которого будет робот, обойдется примерно в 5-10 миллиардов долларов. Так что роботы в космосе обходятся намного дешевле, чем люди.
2.8 Подводная робототехника
В современной жизни человек уже использует роботов во всех сферах своей деятельности. В большинстве своём роботы являются не заменимыми помощниками, но всё чаще они используются там, где человек справлялся без особого труда. Благодаря своему интеллекту человек развил науку, и смог создать робототехнику, но из-за своей лени он всё чаще стремится заменить свой труд роботами. Но и этого человеку мало, теперь человек пытается создать, для своих роботов, искусственный интеллект. С искусственным интеллектом роботы смогут самостоятельно оценивать происходящее вокруг них и принимать решения по действиям, которые им необходимо произвести. Человеку не надо уже будет тратить силы и время на подачу необходимых команд и алгоритмов.
Актуальность: В XXI веке мехатроника и робототехника используется во всех видах промышленности, строительства, быта, авиации, особенно в экстремальных сферах деятельности человечества таких, как военная, космическая и подводная.
Цель данной работы: рассмотрение видов и типов мехатронных и робототехнических систем, а также сферы их использования в современном мире.
Объектом работы являются мехатронные и робототехнические системы.
Предметом данной работы является мехатроника и робототехника в современной жизни.
Для достижения выбранной цели выполнены следующие задачи:
1. Дать основные понятия о мехатронике
2. Рассмотреть сферы применения мехатроники и робототехники
3. Охарактеризовать способы применения мехатроники и робототехники в различных сферах
Методологической базой для написания работы послужили общенаучные методы исследования: обобщения, анализа и синтеза, систематизации, а также изучение научной и учебной литературы, технических справочников, самоучителей, материалы различных Интернет-ресурсов.
Читайте также: