
Индуктивные измерительные преобразователи реферат
Обновлено: 28.06.2024
Термин "электромагнитные преобразователи" объединяет четыре типа преобразователей: индуктивные, трансформаторные, магнитоупругие и индукционные. Для всех этих преобразователей характерно использование зависимости характеристик магнитной цепи (магнитного сопротивления Им, магнитной проницаемости ц, магнитного потока Ф и др.) от величины механического воздействия на элементы этой цепи. Индуктивные преобразователи.
Содержимое работы - 1 файл
Индуктивные преобразователи.docx
Термин "электромагнитные преобразователи" объединяет четыре типа преобразователей: индуктивные, трансформаторные, магнитоупругие и индукционные. Для всех этих преобразователей характерно использование зависимости характеристик магнитной цепи (магнитного сопротивления Им, магнитной проницаемости ц, магнитного потока Ф и др.) от величины механического воздействия на элементы этой цепи. Индуктивные преобразователи.
Индуктивный преобразователь представляет собой дроссель с изменяющимся воздушным зазором или изменяющейся площадью поперечного сечения. В качестве выходного параметра в нем выступает изменение индуктивности L (или кажущегося сопротивления Z) обмотки, одетой на сердечник, при изменении величины зазора б или площади F.
При большем зазоре зависимость становится весьма нелинейной. Поэтому при измерении перемещений до 5-8 мм используют преобразователи с переменной площадью, имеющие большую линейность. Весьма распространены также индуктивные преобразователи соленоидного типа с разомкнутой магнитной цепью. В этих преобразователях изменение индуктивности обмотки вызывается перемещением в катушке ферромагнитного сердечника.
Преимуществом соленоидных преобразователей является возможность измерения больших (до 50-60 мм) перемещений. Существенным недостатком описанных трех преобразователей является наличие на выходе значительного "нулевого" сигнала. Для компенсации начального сигнала применяются мостовые или дифференциальные схемы, в которых обмотки включаются встречно. Мостовые и дифференциальные схемы имеют более широкий линейный участок статической характеристики, большую чувствительность и меньшую погрешность.
Недостатком индуктивных и трансформаторных преобразователей является трудность регулировки и компенсации начального напряжения на выходе преобразователя. Кроме того, для уменьшения помех оба типа преобразователей нуждаются в тщательной экранировке, что увеличивает размеры и вес преобразователей. Погрешности преобразователей вызываются в основном нестабильностью напряжения и частоты источников питания, а также влиянием изменения температуры.
При этом следует иметь в виду, что симметричность обеих половин преобразователя уменьшает погрешность, возникающую за счет внешних воздействий. Достоинствами преобразователей рассмотренных типов являются достаточная мощность без усилительных устройств, высокая чувствительность, сравнительная простота конструкции и эксплуатации, а также невысокая стоимость. Электрическая схема включения преобразователя в простейшем случае состоит из последовательно включенных резистора R и дросселя-преобразователя, параллельно которому включен индикатор.
Питание схемы при измерении статических или медленно изменяющихся сил осуществляется обычно от сети переменного тока частотой 50 гц. Иногда для повышения чувствительности преобразователя питание производят током повышенной частоты (до 10 кгц). В последнем -случае для уменьшения потерь сердечник делается не сплошным, а набирается из тонких, изолированных друг от друга и тщательно склеенных между собой пластин.
Недостатком такой простой схемы является наличие большого начального напряжения Uo, что сужает динамический диапазон и разрешающую способность измерителя. Поэтому вместо этой схемы обычно применяют дифференциальную с компенсацией начального напряжения. В этой схеме используются две цепи, в которые включены по возможности идентичные элементы: измерительный дроссель ДпР и компенсационный дроссель.
При одинаковых параметрах элементов схема будет сбалансирована и ток в измерительной цепи станет равным нулю. По мере пагружения внешней силой преобразователя его сопротивление уменьшается и на выходе схемы появится ток, пропорциональный нагрузке. В магнитоупругих преобразователях трансформаторного типа в качестве переменной выходной величины, являющейся функцией приложенной силы, используется взаимная индуктивность.
Поэтому такие преобразователи являются по существу трансформаторами с переменным коэффициентом трансформации. Конструктивно магнитоупругие трансформаторы выполняются в виде магнитопроводов различной конфигурации и с различным числом обмоток. В средней части магнитопровода этого преобразователя, набранного из пластин электротехнической стали, имеются четыре отверстия для размещения обмоток.
Отверстия сверлятся таким образом, чтобы плоскости обмоток пересекались под прямым углом и е осями преобразователя составляли угол 45 градусов. Такое расположение обмоток приводит к тому, что при отсутствии внешних механических нагрузок напряжение на выходе преобразователя должно быть равно нулю. Однако из-за неоднородности магнитных свойств магнитопровода и технологических неточностей при изготовлении на выходе всегда будет наблюдаться некоторое напряжение, которое компенсируют магнитным шунтом или дополнительной обмоткой.
Первичная обмотка преобразователей питается от источника переменного тока, частота которого выбирается из условий применения преобразователя: при измерении статических и медленно изменяющихся процессов обычно используется промышленная частота. При измерении быстроизменяющихся воздействий преобразователь может питаться постоянным током. Другим источником погрешности является гистерезис. Погрешность этого вида при статических нагрузках достигает 4%, уменьшаясь при динамических нагрузках до 1%.
Для уменьшения гистерезисной погрешности сердечник следует изготовлять из ферромагнитных материалов с узкой петлей магнитного гистерезисного цикла и высоким пределом упругости. В индукционных преобразователях для преобразования механических перемещений в электрический сигнал используется известное явление электромагнитной индукции-наведение э. д. с. в электрическом контуре, в котором меняется величина магнитного потока. Величина индуцированной в катушке э. д. с. определяется зависимостью где е мгновенное значение э. д. с; w число витков катушки; Ф величина магнитного потока.
Из приведенного соотношения видно, что наводимая э. д. с. зависит не от абсолютного значения величины магнитного потока, а от скорости его изменения внутри контура. Поэтому индукционные преобразователи могут применяться непосредственно только для измерения скорости перемещений. Для измерения перемещений или ускорений в контур необходимо ввести соответственно интегрирующую или дифференцирующую схему.
Индуктивные преобразователи
Типы индуктивных преобразователей. На рис. 7.2, а изображен наиболее распространенный преобразователь с малым воздушным зазором , длина которого изменяется под действием измеряемой величины Р (сосредоточенной силы, давления, линейного перемещения). Вследствие изменения зазора изменяется магнитное сопротивление магнитной цепи, а значит и индуктивность катушки, надетой на сердечник и включенной в цепь переменного тока. Изменение индуктивного сопротивления катушки ведет к соответствующему изменению ее полного сопротивления Z. Таким образом, возникает функциональная зависимость между измеряемой механической величиной Р и электрическим сопротивлением Z преобразователя: и .
Преобразователь с изменяющейся в соответствии со значением измеряемой величины площадью воздушного зазора приведен на рис. 7.2, б. Преобразователи такого типа можно применять при измерении перемещений порядка 5…20 мм.
Следующим типом индуктивных преобразователей является преобразователь с разомкнутой магнитной цепью, изображенный на рис. 7.2, в. Он представляет собой катушку 1, внутри которой помещен стальной сердечник 2. Перемещение сердечника, следовательно, и изменение индуктивности катушки является функцией измеряемой величины Р.
Этот тип преобразователя применим для измерения значительных перемещений сердечника.
Преобразователь, показанный на рис. 7.2, г, основан на изменении магнитного сопротивления вследствие размагничивающего действия вторичных токов.
В преобразователе (рис. 7.2, г) экранирующее действие обусловлено вторичными токами в профилированном электропроводном диске 1 из меди или алюминия.
Введение в воздушный зазор диска эквивалентно введению в магнитную цепь реактивного магнитного сопротивления Хм. Таким образом, введение Хм вызывает изменение общего магнитного сопротивления, пропорционального профилю диска, и следовательно, углу поворота. Изменяя профиль диска, можно получить любой вид зависимости индуктивности от угла поворота диска.
Преобразователи этого типа используются для измерения угловых перемещений до 180…360 о .
Основные соотношения для индуктивных преобразователей. Если записать выражение для электрического сопротивления катушки индуктивного преобразователя в виде
то нетрудно установить, что Z связано с длиной воздушного зазора гиперболической зависимостью (рис. 7.3), вследствие чего при начальном зазоре линейный участок характеристики практически ограничен значением , равным .
Увеличить линейный участок характеристики можно путем использования дифференциальных преобразователей (рис. 7.4), обе катушки которых включены обычно в два соседних плеча моста. При Р = 0 якорь 1 (рис. 7.4) расположен симметрично относительно обоих сердечников, и магнитные сопротивления для потоков, создаваемых обеими катушками, одинаковы. Изменения магнитных сопротивлений, происходящие под воздействием измеряемой величины Р, имеют противоположные знаки.
Как известно, ток Iук в измерительной диагонали моста может быть с известным приближением выражен как
где k – постоянный множитель, имеющий размерность ; Z1 и Z2 – сопротивления катушек преобразователя.
Так как при начальном значении измеряемой неэлектрической величины мост уравновешен
(Z1 = Z2) и при использовании симметричного моста Z3 = Z4, то под действием измеряемой величины ток изменяется согласно выражению
Функции ; и изображены на рис. 7.5, из которого видно, что линейный участок характеристики преобразователя значительно расширился по сравнению с линейным участком характеристики одинарного преобразователя, что позволяет увеличить рабочее перемещение якоря до .
В практике нашли применение почти исключительно дифференциальные индуктивные преобразователи.
Объясняется это не только большей линейностью характеристики, но главным образом меньшей погрешностью этих преобразователей. Одним из основных достоинств индуктивных преобразователей является возможность получения большой мощности преобразователя (до 1…5 В×А), что позволяет пользоваться сравнительно малочувствительным указателем на выходе измерительной цепи, а при необходимости – регистрировать измеряемою величину (возможно включение на выходе цепи самописца или вибратора осциллографа без предварительного усиления). В малогабаритных преобразователях, однако, часто приходиться прибегать к включению усилителя между измерительной цепью и указателем или регистратором.
3
ВВЕДЕНИЕ
Термин "электромагнитные преобразователи" объединяет четыре типа преобразователей: индуктивные, трансформаторные, магнитоупругие и индукционные. Для всех этих преобразователей характерно использование зависимости характеристик магнитной цепи (магнитного сопротивления, магнитной проницаемости, магнитного потока и др.) от величины механического воздействия на элементы этой цепи.
Индуктивный преобразователь представляет собой дроссель с изменяющимся воздушным зазором или изменяющейся площадью поперечного сечения. В качестве выходного параметра в нем выступает изменение индуктивности L (или кажущегося сопротивления Z) обмотки, одетой на сердечник, при изменении величины зазора б или площади F.
Преимуществом соленоидных преобразователей является возможность измерения больших (до 50-60 мм) перемещений. Существенным недостатком описанных трех преобразователей является наличие на выходе значительного "нулевого" сигнала. Для компенсации начального сигнала применяются мостовые или дифференциальные схемы, в которых обмотки включаются встречно. Мостовые и дифференциальные схемы имеют более широкий линейный участок статической характеристики, большую чувствительность и меньшую погрешность.
Недостатком индуктивных и трансформаторных преобразователей является трудность регулировки и компенсации начального напряжения на выходе преобразователя. Кроме того, для уменьшения помех оба типа преобразователей нуждаются в тщательной экранировке, что увеличивает размеры и вес преобразователей. Погрешности преобразователей вызываются в основном нестабильностью напряжения и частоты источников питания, а также влиянием изменения температуры.
4
ИНДУКТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ
Принципиальные схемы индуктивных преобразователей показаны на рис. 6 Индуктивный преобразователь (см. рис. 6, а — схема для измерения малых перемещений) представляет собой электромагнит 1 с воздушным зазором, величина
(длина)
5 которого изменяется в функции от измеряемой механической величины F . Особенно широко применяются дифференциальные преобразователи
(см. рис. 6, б), в которых одновременно и притом с разными знаками изменяются два зазора двух электромагнитов, что увеличивает чувствительность и улучшает другие характеристики преобразователя.
При изменении зазора
8 изменяется магнитное сопротивление R
M
магнитопровода электромагнита, связанное с его размерами известной зависимостью: где l
i
, s
i
, μ
i
— длина, площадь поперечного сечения и магнитная проницаемость j -го участка стальной части магнитной цепи; \х
0
— магнитная проницаемость воздуха; δ и s — длина и площадь поперечного сечения воздушного зазора.
Изменение магнитного сопротивления R
м
оценивается по величине полного сопротивления Z катушки 2 (см. рис. 6, а), так как при перемещении якоря 3 изменяются как активное, так и реактивное сопротивления катушки.
Первое изменяется в результате изменения потерь на гистерезис и вихревые токи, а второе — из-за изменения индуктивности катушки.
Индуктивность катушки связана с магнитным сопротивлением R
м
следующей зависимостью: L =Ф ω / l = Iω / R
m
I * ω / I = ω
2
/ R
m
, где l
i
, s
i
, μ
i
— длина, площадь поперечного сечения и магнитная проницаемость j -го участка стальной части магнитной цепи; \х
0
— магнитная проницаемость воздуха; δ и s — длина и площадь поперечного сечения воздушного зазора.
5
Изменение магнитного сопротивления R
м
оценивается по величине полного сопротивления Z катушки 2 (см. рис. 6, а), так как при перемещении якоря 3 изменяются как активное, так и реактивное сопротивления катушки.
Первое изменяется в результате изменения потерь на гистерезис и вихревые токи, а второе — из-за изменения индуктивности катушки.
Индуктивность катушки связана с магнитным сопротивлением R
м
следующей зависимостью: L =Ф ω / l = Iω / R
m
I * ω / I = ω
2
/ R
m
, где Ф — магнитный поток; ω — число витков катушки; I— ток в катушке.
Сопротивление R
Fe
, эквивалентное потерям P
Fe
, можно записать следующей формулой: R
Fe
= P
Fe
/ I
2
Однако потери P
Fe в первом приближении пропорциональны квадрату потока Ф, поэтому: R
Fe
= K Ф
2
/ I
2
= K ω
2
/ R
m
, где К — коэффициент, зависящий от конструкции преобразователя. При изменении воздушного зазора 8 меняются как активное, так и реактивное сопротивления катушки, а следовательно, и полное ее сопротивление Z.
Таким образом, в индуктивных преобразователях имеет место последовательное преобразование
F→∆δ→R
M
→
Z.
Преобразователи описанных типов применяются при сравнительно небольших перемещениях якоря относительно сердечника. Для измерения больших перемещений якоря используются дифференциальные индуктивные преобразователи с разомкнутой магнитной цепью (см. рис. 6, в), в которых якорь 3
перемещается внутри катушек 2, изменяя их полные сопротивления.
Приборы с индуктивными преобразователями могут быть использованы для измерения, как перемещения, так и любых механических величин, функционально связанных с перемещением якоря, например сил, давлений, крутящих моментов и т.д.
6
ИНДУКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ
Он представляет собой преобразователь, в котором измеряемая неэлектрическая (механическая) величина преобразуется в индуктированную
ЭДС. Согласно закону электромагнитной индукции индуктированная электродвижущая сила Е определяется скоростью изменения магнитного потока Ф, сцепленного с катушкой из w витков:
Индукционные преобразователи непосредственно могут применяться только в приборах для измерения скорости линейных или угловых перемещений.
На практике индукционные преобразователи применяются в приборах для измерения скорости вращения (в тахометрах), а также в приборах для измерения параметров вибраций, т.е. для измерений переменных во времени линейных и угловых перемещений и ускорений (в виброметрах и акселерометрах).
Индукционные преобразователи для тахометров представляют собой небольшие генераторы постоянного или переменного тока, вал которых механически связан с валом испытуемого двигателя. Чаще всего применяют генераторы переменного тока. Электродвижущая сила генератора Е, как известно, выражается уравнением: где с - конструктивная постоянная, определяемая числом витков
7 и числом пар параллельных ветвей; Ф - поток возбуждения, создаваемый обычно постоянными магнитами; р - число пар полюсов; n - число оборотов в минуту (скорость вращения).
Величина pn /60 = f является частотой переменной ЭДС, индуктируемой в генераторе.
Таким образом, критерием измеряемой скорости вращения может служить либо ЭДС генератора Е, либо частота f . Принцип устройства индукционных преобразователей приборов для измерения параметров вибраций и ускорений показан на рис. 7.
На рис. 7, а представлен принцип устройства индукционных преобразователей приборов для измерения линейных вибраций.
Цилиндрическая катушка 1, связанная с объектом измерения посредством вала 2 и расположенная в кольцевом зазоре магнитопровода 3, совершает линейные перемещения (колебания) в направлении, указанном стрелками.
Цилиндрические постоянные магниты 4 намагничены вдоль образующей и создают в зазоре радиальное поле. При своем перемещении витки катушки под прямым углом пересекают линии магнитного поля и в них индуктируются
ЭДС.
Если линейное перемещение ∆х является некоторой функцией времени
∆х = = f ( t ), то мгновенное значение ЭДС E=ωBl a
, где число витков катушки; В — индукция в зазоре; l
а
- активная длина витка.
Точно так же индуктируется ЭДС в цилиндрической катушке 1 (см. рис.
7, б), помещенной на ферромагнитный сердечник 5, когда он вместе с катушкой совершает угловые перемещения в направлении, указанном стрелкой.
8
Схема устройства простейшего тахометра с индукционным преобразователем.
На валу укреплен стальной зуб М . При вращении вала этот зуб проходит мимо зазора неподвижно установленной магнитной системы с постоянным магнитом, уменьшая сопротивление зазора так, как показано на кривой R
М
При этом в катушке, надетой на магнит, наводятся импульсы ЭДС, форма которых показана на кривой е . Частота импульсов, выраженная в герцах, всегда будет в точности равна скорости вращения вала, выраженной в числе оборотов в секунду.
Рис. 6 Принципиальные схемы индуктивных преобразователей:
9
а - для измерения малых перемещений; 6 — дифференциальный преобразователь; в — для измерения больших перемещений; 1 — электромагниты; 2 — катушки; 3 — якорь
Рис. 7 Принцип устройства индукционных преобразователей приборов для измерения параметров вибраций и ускорений: а - Для измерения линейных вибраций; б - для измерения угловых вибраций;
1 - цилиндрическая катушка; 2- вал, связывающий катушку с объектом измерения; 3 - зазор магнитопровода; 4- постоянные магниты;
5 - ферромагнитный сердечник
Индукционный преобразователь для измерения параметров вибрации применяется для измерений: амплитуды колебаний, скорости и ускорения перемещения колеблющегося тела.
10
Индукционный преобразователь схематически изображен на рис. 4 и представляет собой цилиндрическую катушку 1, внутри которой на плоских пружинах подвешен постоянный магнит 3.
Вся конструкция помещена в корпус, жестко скрепленный с объектом измерения. При колебании корпус с катушкой перемещается относительно неподвижного в пространстве магнита, при этом витки катушки пересекают магнитные силовые линии, и в катушке наводится электродвижущая сила e
k
, пропорциональная скорости колебания объекта измерения.
Приборы, с помощью которых измеряется скорость колебаний, называются волосиметрами.
Чтобы с помощью индукционного преобразователя измерить амплитуду колебаний, необходимо от скорости колебаний перейти к амплитуде перемещения путем интегрирования выражения для e
k
. Физическое интегрирование e
k
осуществляется с помощью специальной интегрирующей электрической цепи, составленной из емкости и сопротивления (рис. 5).
Для этой схемы уравнение мгновенных значений ЭДС будет иметь вид:
12
ЗАКЛЮЧЕНИЕ
В практике нашли применение почти исключительно дифференциальные индуктивные преобразователи.
Объясняется это не только большей линейностью характеристики, но главным образом меньшей погрешностью этих преобразователей. Одним из основных достоинств индуктивных преобразователей является возможность получения большой мощности преобразователя (до 1…5 В×А), что позволяет пользоваться сравнительно малочувствительным указателем на выходе измерительной цепи, а при необходимости – регистрировать измеряемою величину (возможно включение на выходе цепи самописца или вибратора осциллографа без предварительного усиления). В малогабаритных преобразователях, однако, часто приходиться прибегать к включению усилителя между измерительной цепью и указателем или регистратором.
Действие индуктивных ИП основано на зависимости индуктивности или взаимной индуктивности обмоток преобразователя от положения отдельных элементов магнитопровода, на котором они расположены и перемещение которых определяется чувствительным элементом, воспринимающим измеряемую величину. Такие преобразователи используются для измерения механических перемещений, давлений, усилий, моментов, расходов и других величин, преобразуемых в механические перемещения.
Рисунок 2.12 – Индуктивный измерительный преобразователь. Пунктиром показан путь магнитного потока.
Величина магнитного потока в последовательной цепи зависит от магнитного сопротивления элементов этой цепи. Слой воздуха между ферромагнитной пластиной и ферромагнитным сердечником также является частью цепи. Величина зазора изменяется с перемещением пластины относительно магнитопровода. Следовательно, изменяется магнитный поток в цепи, а с ним и индуктивность катушки на сердечнике. Таким образом, величину перемещения можно определить по изменению индуктивности катушки.
Общее магнитное сопротивление А последовательной цепи равно сумме магнитных сопротивлений сердечника, пластины и воздушных зазоров. Если зазор равен нулю (d = 0), а магнитное сопротивление сердечника и пластины в сумме равно A0, то общее магнитное сопротивление цепи можно найти по формуле
m0 – магнитная проницаемость вакуума;
S – площадь поперечного сечения зазора.
Учитывая, что индуктивность катушки L = N2 / A, и обозначив отношение через k = const, получим функцию преобразования индуктивного ИП:
L0 – индуктивность катушки в случае, когда величина зазора d равна нулю. Как видно из уравнения, функция преобразования нелинейна.
Индуктивные ИП можно также конструировать как дифференциальные. Здесь, так же, как и с случае емкостных ИП, имеется три возможности построения: с переменной величиной зазора магнитопровода, с переменной площадью зазора магнитопровода и с переменной магнитной проницаемостью зазора. Все эти меры позволяют увеличить чувствительность преобразователя.
Действие взаимоиндуктивных (трансформаторных) ИП основано на изменении взаимной индуктивности катушек под действием механических перемещений. При этом может перемещаться как сердечник или его часть, так и одна из катушек индуктивности.
Взаимоиндуктивный ИП, предназначенный для измерения линейных перемещений, состоит из двух обмоток с разным количеством витков. Одна обмотка питается от источника переменного тока, и ЭДС, наведенная во второй обмотке, является функцией зазора d.
Для измерения угловых перемещений вторую обмотку выполняют в виде цилиндра, который может вращаться в кольцевом зазоре, образованном магнитопроводом и магнитным сердечником. Такой ИП позволяет измерять большие угловые перемещения.
Если вам нужна помощь в написании работы, то рекомендуем обратиться к профессионалам. Более 70 000 авторов готовы помочь вам прямо сейчас. Бесплатные корректировки и доработки. Узнайте стоимость своей работы.
Источником погрешностей индуктивных и взаимоиндуктивных ИП будет температурная зависимость активной составляющей сопротивления.
Принцип действия и конструкция. Индукционным преобразователем называется преобразователь, принцип действия которого основан на законе электромагнитной индукции. Преобразователь имеет катушку. При воздействии входной величины на преобразователь изменяется Потокосцепление катушки с внешним по отношению к катушке магнитным нолем. При этом в катушке наводится ЭДС
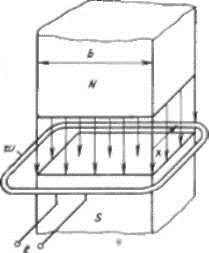
где w — число витков катушки; Ф — проходящий через нее поток; Q — площадь, через которую проходит этот поток; В — индукция магнитного поля.
ЭДС в катушке может наводиться при изменении во времени любой из перечисленных величин w, В, Q.
В качестве примера рассмотрим преобразователь, который представляет собой магнитную систему с постоянным магнитом, в воздушном зазоре которой перемещается катушка (рис. 15). При движении катушки с изменением х изменяется площадь катушки, находящейся в магнитном поле, Q = bх. Это приводит к изменению потокосцепления ψ = wBbx, и в катушке наводится ЭДС
e=-dФ/dt=-wBb(dx/dt) (29)
Индукционные преобразователи служат для преобразования линейной dx/dt или угловой da/dt скорости перемещения катушки относительно магнитного поля в ЭДС. Они являются генераторными преобразователями и преобразуют механическую энергию в электрическую.
Различают ряд типов преобразователей:
- Преобразователи скорости вибрации
- Тахометрические преобразователи
- Импульсные преобразователи
Погрешность индукционных преобразователей. ЭДС индукционных преобразователей пропорциональна скорости перемещения катушки лишь при условии, что индукция В постоянна на протяжении всего пути ее перемещения. Непостоянство индукции вызывает возникновение погрешности.
Погрешность индукционных преобразователей также во многом зависит от тока, который потребляет вторичный преобразователь. Проходя по измерительной обмотке индукционного преобразователя, этот ток создает магнитное поле, которое согласно правилу Ленца направлено встречно направлению основного поля и производит размагничивающее действие. Вследствие этого суммарная индукция уменьшается, уменьшается и ЭДС преобразователя. Это явление, имеющее место в электрических машинах и, в частности, в тахометрических преобразователях называется реакцией якоря. Вследствие реакции якоря уменьшается чувствительность тахометрического преобразователя и его функция преобразования становится нелинейной, что приводит к погрешности. Для уменьшения погрешности следует уменьшить ток преобразователя. Имеются также конструктивные методы уменьшения этой погрешности.
Принцип действия и конструкция.Работа магнитоупругого преобразователя основана на магнитоупругом эффекте. Как известно, ферромагнитные вещества имеют области самопроизвольного намагничивания (домены). В не намагниченном состоянии вещества домены ориентированы хаотично и магнитные моменты отдельных доменов компенсируют друг друга. При помещении ферромагнитного тела в магнитное поле домены ориентируются в его направления. В слабом поле ориентация частичная; в сильном поле при магнитном насыщении материала ориентируются все домены. Ориентация доменов вызывает увеличение магнитной индукции, характерное для ферромагнитных материалов.
Если на намагничен!п>1й образец ферромагнитного тела воздействовать внешней механической силой, то тело деформируется, домены изменят свою ориентацию и индукция в материале изменяется. Явление имеет упругий характер. Если силу снять, то индукция примет прежнее значение. Поскольку абсолютная магнитная проницаемость вещества
то при заданной напряженности поля Hизменение индукции В эквивалентно изменению магнитной проницаемости.
Изменение индукции или магнитной проницаемости в ферромагнитных телах при действии на них силы называется магнитоупругим эффектом.
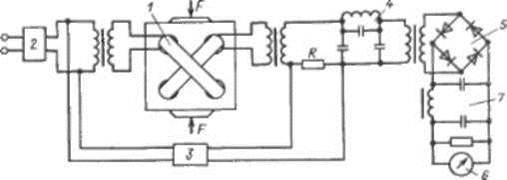
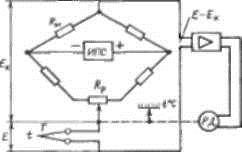
Схемы включения. Магнитоупругие индукционные преобразователи включаются в мостовые измерительные цепи. В плечо,смежное с измерительным преобразователем, включается такой же преобразователь для компенсации аддитивных погрешностей. Он обычно не нагружается — прибор строится по дифференциальной схеме первого типа. Питание моста производится от феррорезонансного стабилизатора.
Схема включения трансформаторного магнитоанизотропного преобразователя приведена на рис 16. Первичная обмотка 1 питается от феррорезонансного стабилизатора 2. На выходе у ненагруженного преобразователя имеется некоторое остаточное напряжение. Для его компенсации в цепь включен резистор R, на который подается напряжение через фазосдвигающую цепочку 3, Напряжение питания преобразователя выбирается так, чтобы режим его работы был близок к режиму насыщения магнитной цепи. При этом на выходе преобразователя имеется напряжение верхних гармоник значительной величины. Для зашиты от гармоник схема содержит фильтр верхних частот 4. Напряжение выпрямляется двухполупериодным выпрямителем 5 и подается на магнитоэлектрический измерительный механизм 6. Фильтр нижних частот 7 служит для сглаживания пульсаций выпрямленного напряжения. При измерении быстропеременных процессов в качестве измерительного механизма включается гальванометр свeтолучевого осциллографа.
Магнитоупругие трансформаторные преобразователи могут работать также с автоматическими потенциометрами переменного тока.
Погрешность магнитоупругих преобразователей. Функция преобразования магнитоупругих преобразователей, как правило, нелинейна. Имеется ряд методов уменьшения нелинейности. Нелинейность уменьшается при сокращении диапазона измерения измеряемой силы; если наряду с измеряемой силой преобразователь нагружается некоторой дополнительной постоянной силой; при соответствующем выборе магнитного режима преобразователя; при применении магнитоанизотропных материалов, имеющих различную магнитную проницаемость в различных направлениях. Такие материалы получают в результате определенной технологической обработки — ковки, протяжки, прокатки и т. д. Применение этих мер позволяет уменьшить погрешность, происходящую вследствие нелинейности, до 1,5 —2 %.
Функция преобразования при увеличении нагрузки магнитоупругих преобразователей отличается от функции преобразования при уменьшении нагрузки. Это отличие имеет гистерезисный характер и обусловлено магнитным и механическим гистерезисом. При статических измерениях гистерезис преобразователя больше, чем при динамических. Для уменьшения погрешности, вызванной гистерезисом, рекомендуется изготавливать преобразователи из материалов, имеющих возможно больший предел упругости и возможно меньшую петлю магнитного гистерезиса. Максимальные механические напряжения в магнито упругом материале должны быть в 6-1 раз меньше его предела упругости. Погрешность, обусловленная гистерезисом, уменьшается после тренировки преобразователя. Тренировка производится 5—10-кратным нагружением силой, соответствующей пределу изменения преобразователя. Гистерезис может возникнуть также в результате сип трения, если, например, магнитопровод не сплошной, а составной. Приведенную погрешность, вызванную гистерезисом, можно снизить до 0,5-1 %.
При изменении температуры изменяются магнитная проницаемость магнитопровода и электрическое сопротивление обмоток. При резко выраженном поверхностном эффекте изменение температуры оказывает меньшее влияние, чем при слабо выраженном. Для уменьшения температурной погрешности используются дифференциальные схемы и специальные схемы температурной компенсации.
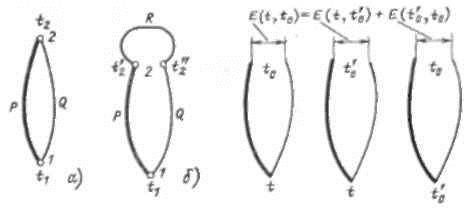
Принцип действия и конструкция. Термоэлектрический преобразователь представляет собой термопару, состоящую из двух разнородных проводников Р и Q, соединенных между собой в двух точках, как схематически показано на рис. 17. На границе раздела двух различных металлов имеется контактная разность потенциалов EpQ (t), зависящая от рода металлов и от температуры контакта. В цепи, показанной на рис. 17, а, контактные разности потенциалов образуются в точках I и 2. Если t1 = t2то они равны между собой и, будучи противоположно направленными, взаимно уравновешиваются. Если же t1и t2 не равны в цепи развивается результирующая ЭДС
называемая термоэлектродвижущей силой (термоЭДС). Места контактов называются спаями термопары.
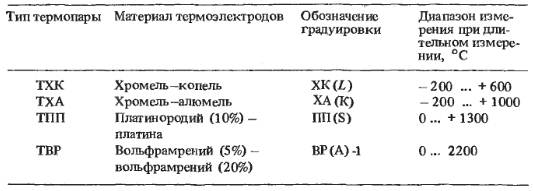
Термоэлектрические преобразователи используются для измерительного преобразования температуры в ЭДС. В таблице приведены наиболее широко используемые термопары (ГОСТ 6616-84) и их основные характеристики (ГОСТ 3044-84).
Градуировочные характеристики и допустимые погрешности этих термопар также приведены в ГОСТ 3044-84.
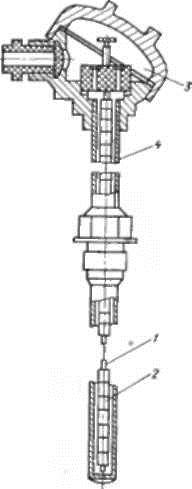
Термоэлектрический датчик обычно называется термопарой. Устройство промышленной термопары показано на рис.19. Термоэлектроды изолируются друг от друга керамическими бусами 2 или керамической трубкой; одним своим концом они свариваются, другим -подсоединяются к зажимам в головке 3, служащей для подключения внешних проводов. Термоэлектроды помешаются в защитный чехол 4 (трубку, закрытую с одной стороны). Чехол делается из жаропрочной стали, а при измерении очень больших температур - из керамики или кварца.
Место соединения термоэлектродов называется горячим или рабочим спаем.
Схемы включения. Рабочий конец термопары погружается в среду, температуру которой требуется измерить. Свободные концы подключаются к вторичному прибору. Если температура свободных концов постоянна, то подключение может быть сделано медным проводом, а если не постоянна, то оно выполняется специальными удлинительными (компенсационными) Проводами. В качестве последних используются два провода из различных материалов. Провода подбираются так, чтобы при температуре свободных спаев и в паре между собой они имели такие же термоэлектрические свойства, как и рабочая термопара. При подсоединении к термопаре компенсационные провода удлиняют ее и дают возможность отвести холодный спай образованной составной термопары в такое место, где температура остается постоянной.
В качестве вторичных преобразователей используются либо магнитоэлектрические милливольтметры, либо потенциометры постоянного тока.
Погрешность термоэлектрического термометра. Одним из источников погрешности термоэлектрического термометра является несоответствие температуры свободных концов термопары температуре, при которой была произведена градуировка.
Номинальная функция преобразования термопар со стандартной градуировкой задается градуировочной таблицей. Она определяет зависимость ЭДС E(t,t0) термопары от измеряемой температуры t при температуре свободных спаев to = 0 °С. Если в условиях измерения температура свободных спаев t'0 не равна температуре Го. то ЭДС термопары E отличается от ЭДС Et t0), которая нужна для определения температуры по стандартной градуировке.
Вследствие неравенства температур t0 Ф t'0 показание пирометрического милливольтметра не равно действительной температуре. Поправка к его показаниям приближенно может быть определена соотношением
где к — коэффициент, зависящий от измеряемой температуры и от вида термопары.
Для хромель-копелевой термопары он лежит в пределах 0,8—1; для хромель-алюминиевой - в пределах 0,98—1,11; для платинородий-платиновой — в пределах 0,82—1,11. При малом значении Δt= t'0 - t0 в ряде случаев можно принять к = 1. Это позволяет вводить поправку в показания пирометрического милливольтметра с помощью корректора нуля. При отключенной термопаре стрелку прибора с помощью корректора ставят на отметку, соответствующую г0. При включении термопары и измерении температуры показания пирометра будут больше не корректированных на значение Δt. Такое введение поправки целесообразно, когда значение t'0 сохраняется постоянным.
Преобразователи, преобразующие естественную входную величину в виде перемещения в изменение индуктивности, называются индуктивными.
Индуктивный преобразователь представляет собой дроссель с изменяющимся воздушным зазором (рис..6. а.) или изменяющейся площадью поперечного сечения (рис.6. б)

Рис. 6. Конструкция и схемы включения индуктивных пореобразователей.
Выходной параметр индуктивного преобразователя – изменение индуктивности L обмотки, надетой на сердечник, при изменении зазора δ или площади S.
Для измерения больших перемещений применяют индуктивные преобразователи соленоидного типа ( рис.6. в.). Изменение индуктивности в этих преобразователях вызывается перемещением в катушке ферромагнитного сердечника. Соленоидные преобразователи могут применяться для измерения перемещений 100 – 1000 мм.Особенность индуктивных преобразователей в том, что чувствительность их к внешним факторам не зависит от чувствительности к измеряемой величине, поэтому увеличение чувствительности к измеряемой величине приводит к уменьшению погрешности преобразователя.Индуктивные преобразователи применяют для измерения перемещений, толщены покрытий, в микромерах. Изготавливают также индуктивные динаметры и манометры, в которых усилие и давление преобразуется в перемещение при помощи упругих элементов, т.е. промежуточных преобразователей.При эксплуатации индуктивных преобразователей следует учитывать электромеханическую силу, действующую на подвижный сердечник. Поэтому их можно использовать только для измерения достаточно больших сил.Динамические характеристики индуктивных преобразователей определяются в основном параметрами подвижной механической системы, которая чаще всего является колебательной.
Преобразователи, преобразующие перемещение в изменение взаимоиндуктивности, называются трансформаторными.
На рис.7. а и б показаны трасформаторные преобразователи с подвижным сердечником.

Рис.7. Конструкции и схемы включения трансформаторных преобразователей
Достоинства трансформаторных преобразователей : достаточная мощность сигнала без усилительных устройств, сравнительная простота для измерения усилий и давлений. Трансформаторные преобразователи применяют в сочетании с упругими элементами (мембранами, пружинами).Недостатки индуктивных и трансформаторных преобразователей - в большой инерционности, необходимости регулировки и компенсации начального напряжения на выходе преобразователя. Кроме того, для уменьшения помех оба преобразователя нуждаются в тщательной экранировке, что увеличивает размеры и массу преобразователя. Погрешности трансформаторных преобразователей вызываются в основном нестабильностью напряжения и частоты источника питания, а также влиянием изменения температуры.При измерении динамических процессов частота источника питания должна быть значительно выше частоты измеряемого процесса. При измерении медленно меняющихся процессов преобразователь подключают к источнику питания промышленной частоты.
Преобразователи, основанные на изменении магнитной проницаемости ферромагнитного сердечника под воздействием механической деформации, называют магнитоупругими.Магнитоупругий преобразователь представляет собой ферромагнитный сердечник с одной или двумя обмотками, к которому прикладываются механические усилия. Усилие создает в сердечнике механическое напряжение, которое приводит к изменению магнитной проницаемости μ и, следовательно, к изменению магнитного сопротивления, что обуславливает изменение электрического сопротивления Z катушки. Таким образом, в магнитоупругом преобразователе имеется следующая цепь преобразований:F → σ → μ → R → Z или e. Магнитоупругий эффект объясняется дополнительным магнитным взаимодействием атомом вследствие искажения атомной решетки кристалла от воздействия механических усилий. В общем случае зависимость магнитной проницаемости от механических напряжений имеет довольно нелинейный характер. Однако, выбирая оптимальные режимы работы, можно получить относительно линейную зависимость.
Существует большое разнообразие конструктивных форм магнитоупругих преобразователей. Их можно разбить на две основные группы: преобразователи дроссельного и трансформаторного типов.В преобразователях дроссельного типа изменение магнитной проницаемости сердечника приводит к изменению полного электрического сопротивления катушки дросселя.В преобразователях трансформаторного типа в качестве выходной величины используется взаимная индуктивность. Такие пореобразователи – по существу трансформаторные с переменным коэффициентом трансформации. Конструкции основных типов магнитоупругих преобразователей показаны на рис. 8.


Рис.8. Конструкции магнитоупругих преобразователей.
Сердечник преобразователя при измерении сосредоточенных сил может претерпевать деформацию сжатия (растяжения) (рис. 8. а, б, и в ) или изгиба (рис.8.д.). На рис.8.г. изображен тензометрический магнитоупругий преобразователь, магнитная цепь которого выполнена из тонкого листа пермаллоя, наклеенного на исследуемую деталь.
В преобразователях, приведенных на рис.8. а-д, используется эффект изменение магнитной проницаемости сердечника в одном направлении. В настоящее время широкое применение получили магнитоупругие преобразователи, в которых используется изменение магнитной проницаемости одновременно в двух взаимно перпендикулярных направлениях, т.е. магнитная анизотропия сердечника. На рис.8. е показана конструкция магнитноанизотропного преобразователя со скрещенными обмотками. Первичная и вторичная обмотки расположены в сплошном магнитопроводе под прямым углом друг к другу. В ненагруженном состоянии преобразователя силовые линии первичной обмотки не пересекают вторичную обмотку, в результате чего ЭДС вторичной обмотки равно нулю. При действии усилия вследствие изменения магнитной проницаемости материала магнитное поле вытягивается в направлении большей проницаемости, сжимается в направлении меньшей проницаемости и, сцепляясь со вторичной обмоткой, индуцирует в ней ЭДС, пропорциональную приложенному усилию.
Магнитострикционный эффект – четный эффект, т.е. знак деформации сердечника не меняется при перемене направления поля на обратное. Частота изменения деформаций или колебаний сердечника в 2 раза больше частоты переменного тока, протекающего через обмотку преобразователя. На магнитострикционном эффекте основана работа магнитострикционных ультразвуковых преобразователей или излучателей.
Основные достоинства магнитоупругих преобразователей: высокие мощность и уровень выходного сигнала, надежность, простота конструкции. Однко магнитоупругие преобразователи обладают довольно большими погрешностями. Основные источники погрешностей: температурная погрешность и магнитоупругий гистерезис. При быстроизменяющихся усилий следует учитывать также инерционность магнитоупругих преобразователей.
Преобразователи, в которых используется яление электромагнитной индукции, т.е. наведение ЭДС в электрическом контуре при изменении магнитного потока, называются индукционными.По принципу действия индукционные преобразователи подразделяются на две группы.В преобразователях первой группы магнитное сопротивление постоянного магнитного потока остается неизменным, а индуцированная ЭДС наводится из-за линейных или угловых перемещений сердечника катушки в зазоре ( рис. 9.).

U I II
К1
UII = U I II - U II II

U1
Н2
U II II
К2
 |
 |
От ЧЭ Рис. 9. Индукционный преобразователь.
В некоторых конструкциях перемещается катушка. Конструктивно преобразователь представляет собой катушку, имеющую три обмотки.
Первичная обмотка равномерно распределена по всей длине. Две вторичные обмотки выполнены в виде отдельных секций с одинаковым числом витков. Внутри каркаса размещен сердечник, связанный со штоком чувствительного элемента., где:- ЭДС верхней вторичной обмотки;- ЭДС нижней вторичной обмотки;К – коэффициент продолжительности;- частота переменного напряжения, подаваемого на первичную обмотку;- напряжение первичной обмотки;М – взаимоиндуктивность первичной и вторичных обмоток.Так как вторичные обмотки включены встречно, то суммарное напряжение на выходе преобразователя в среднем положении сердечникаравно нулю:.При изменении давления сердечник перемещается, например, вверх. Вследствие этого взаимоиндуктивность катушек изменяется на . ЭДС во вторичных обмотках будут иметь: На выходе преобразователя будет действовать напряжение
При перемещении сердечника вниз на выходе преобразователя действует напряжение Изменение взаимоиндуктивности пропорционально изменению положения сердечника :.
Таким образом, величина действующего напряжения Uii определяется перемещением сердечника и пропорциональна этому перемещению.
В преобразователях второй группы магнит и катушка неподвижны. А индуцированная ЭДС наводится путем изменения магнитного потока вследствие колебания магнитного сопротивления магнитной цепи, создаваемых чаще всего изменением воздушного зазора этой цепи

Рис. 10. Конструкции индукционных преобразователей.
При вращении ротора происходит изменение сопротивления магнитной цепи с частотой, определяемой скорость вращения и числом зубцов. Индукционные преобразователи, предназначенные для измерения скорости вращения, называют тахогенераторами. Тахогенераторы – это электрические машины, работающие в генераторном режиме и служащие для преобразования скорости вращения в пропорциональный электрический сигнал.
Читайте также: