
Факторы влияющие на точность спутниковых измерений реферат
Обновлено: 05.07.2024
В современной геодезии всё чаще начинают использовать новейшие спутниковые и компьютерные технологии для определения координат местоположения, абсолютных высот в решениях главных геодезических задач и построении карт. Такие технологии могут вполне заменить нивелир или теодолит и избавить геодезиста от долгой полевой трудоёмкой работы, ведь данные всегда нужны в обновлениях, а с помощью теодолита и ручного построения геодезических сетей это не удастся сделать (будет затрачено слишком много времени).
Содержание работы
Введение стр.1
История создания GPS-системы стр. 1
Состав GPS-системы стр. 1
ГЛОНАСС стр. 3
Примеры использования GNSS в геодезии стр. 4
- Основные принципы определения координат с помощью GPS-системы стр.4
- Факторы снижения точности определения координат стр. 5
- Режим дифференциальной коррекции стр. 7
- Режимы измерения, измеряемые величины стр. 8
Кодовые псевдодальности стр. 9
Фазовые измерения стр. 10
Интегральный допплер стр. 10
Изоповерхности, геометрический фактор стр. 10
WAAS и EGNOS стр. 11
Этапы создания геодезической сети стр. 15
Применение GNSS в повседневной жизни стр. 16
Заключение стр. 20
Содержимое работы - 1 файл
Применение GNSS в геодезии.doc
Каждый спутник системы излучает несущие колебания с длиной волны около 20 сантиметров, манипулированные по фазе кодовыми последовательностями. Здесь скажем, что все спутники GPS работают на одних и тех же несущих частотах, но каждому спутнику присущ его индивидуальный код. Спутниковый приемник генерирует копии кода каждого спутника и идентифицирует спутники именно по форме кода. Сразу после включения приемника он начинает захват сигналов спутников. Другими словами, приемник выполняет корреляционную обработку сигнала спутника и генерируемых этим приемником копий кодов, перебирая эти копии. Отличие функции корреляции от нуля означает, что спутник идентифицирован, а его сигнал - захвачен.
2. Фазовые измерения
Здесь ρ(t) - мгновенное расстояние до спутника в момент t; φ(t) - мгновенное измеренное значение разности фаз; * δφ - начальная фаза колебаний спутника; δφr - начальная фаза колебаний приемника.
Таким образом, при кодовых измерениях играет роль несинхронность показаний часов спутника и приемника, а при фазовых измерениях играет роль несинфазность колебаний опорных генераторов спутника и приемника. Аппаратурно, то есть путем организации каких-то дополнительных каналов связи между приемником и спутником, эти параметры определить невозможно. В формуле (1) измеряемая величина разности фаз меняется со временем из-за изменения дальности до спутника. Вследствие эффекта Допплера со временем меняется значение частоты принимаемого сигнала.
3. Интегральный допплер
Допплеровские измерения в режиме интегрирования допплеровской частоты позволяют получать разность расстояний от определяемого пункта до двух исходных пунктов. В случае спутниковых измерений роль исходных пунктов выполняют спутники. Напомним, что в разностных наземных системах определяемый пункт получают как точку пересечения изолиний - гипербол. В случае спутниковых измерений, когда решается не плоская, а пространственная задача, речь идет не о изолиниях, но об изоповерхностях. В случае допплеровских измерений такой поверхностью является гиперболоид; местоположение пункта определяют как точку пересечения гиперболоидов. Их должно быть как минимум три, следовательно, одновременно необходимо наблюдать три пары спутников. Геометрия наблюдений в этом случае такова, что гиперболоиды пересекаются под довольно острыми (тупыми) углами. Это гораздо хуже, чем при дальномерных измерениях, когда изоповерхности - сферы могут пересекаться под углами, близкими к 90°. Тем не менее, гиперболическую засечку, раз она уже есть, используют при обработке результатов в качестве полезного дополнительного материала.
4. Изоповерхности, геометрический фактор
Пусть с использованием дальномерного устройства необходимо определить местоположение пункта относительно исходных пунктов. Местоположение вновь определяемого пункта невозможно определить с точностью, которая выше точности измерений. В лучшем случае ошибка определения местоположения равна ошибке измерений. Сказанное можно выразить в виде формулы, связывающей ошибку mопр определения местоположения и ошибку измерения mизм (2):
mопр=(DOP)mизм
Здесь DOP - Dilution Of Precision - падение ТОЧНОСТИ, размывание ТОЧНОСТИ из-за геометрии наблюдений, геометрический фактор. Применительно к спутниковым наблюдениям - это коэффициент, определяющий, во сколько раз ошибка определения больше ошибки измерения. DOP не может быть меньше единицы, но чем он меньше, тем лучше. Величина DOP зависит от того, под какими углами пересекаются изоповерхности, то есть от геометрии наблюдений.
Существует несколько видов DOP. DOP по плановому положению называют HDOP (Horisontal DOP). DOP по высоте (вертикали) называют VDOP (Vertical DOP). Сумма квадратов этих DOP дает квадрат PDOP, то есть DOP по положению - Position DOP. Опыт работы говорит, что при высокоточных измерения PDOP не должен превышать трех единиц. При рядовых работах, например при определении координат опознаков, он не должен превышать семи. К сожалению, пока не существует инструкций, регламентирующих предельные значения такого рода параметров, да и вообще других допусков на точность и продолжительность измерений. Сейчас все делается лишь на основе собственного опыта. DOP по определению поправки часов называют TDOP (Time DOP). Сумма квадратов PDOP и TDOP дает квадрат GDOP - геометрический DOP (Geometrical DOP). Он является наиболее общей характеристикой геометрических условий наблюдений.
PDOP имеет ясный геометрический смысл. Представим пункт наблюдений, из которого направлены на четыре наблюдаемых спутника векторы единичной длины. Если соединить концы векторов, то образуется трехгранная пирамида. Объем этой пирамиды является величиной, обратной PDOP. Ясно, что чем больше объем пирамиды, тем меньше PDOP, тем точнее определяется местоположение приемника. Например, хорошо, если наблюдается спутник вблизи зенита пункта и спутники, находящиеся невысоко над горизонтом и более-менее равномерно распределенные по азимуту. На самом деле, в области приема антенны приемника находятся много спутников, порой до девяти-десяти. Приемник вычисляет и выдает на дисплей PDOP для спутников, наиболее удачно в геометрическом смысле расположенных относительно приемника.
WAAS и EGNOS
Сервис широкозональных систем спутниковой дифференциальной навигации, таких как WAAS и EGNOS, в силу ряда причин пока малоизвестен геодезистам, маркшейдерам, землеустроителям и топографам, выполняющим работы с помощью спутниковых геодезических приемников. Рекомендации, изложенные в данной статье, основаны на практическом опыте использования сервиса при проведении полевых работ в 2003–2006 гг. на территории Ивановской, Владимирской и ряда других областей.
Использование этого сервиса при полевых топографо - геодезических работах позволяет значительно сократить затраты времени. При этом спутниковые измерения выполняются в режиме реального времени. Роль базовой станции, передающей дифференциальные поправки на подвижный приемник, исполняют геостационарные спутники, а координаты определяются в кинематическом режиме .Отпадает необходимость выполнять окончательную обработку результатов спутниковых наблюдений в камеральных условиях с целью получения пространственных координат геодезических пунктов. Координаты измеряемых точек вычисляются в приемнике во время сеанса наблюдений и по окончании измерений без проблем экспортируются из накопителя спутникового приемника в компьютер, для последующего использования.
Сервис WAAS (Wide Area Augmentation System) был разработан по заказу Федеральной службы авиации США и предназначен для обеспечения навигации и работы автоматизированных систем посадки в гражданской авиации. Он позволяет повысить точность определения пространственных координат, целостность и доступность основных сигнало в глобальной навигационной спутниковой системы (GNSS) NAVSTAR (GPS) на территории континентальной части США, побережья Канады и Мексики. Сервис WAAS включает два спутника, находящиеся на геостационарных орбитах. Поправки, вычисленные наземными станциями, направляются на эти спутники и передаются ими на частоте L1. Поправки могут приниматься спутниковыми приемниками, аналогично сигналу GPS.
В 1993 г. был разработан сервис EGNOS (European Geostationary Navigation Overlay Services), направленный на улучшение работы GNSS GPS на территории Европы. Этот сервис также имеет два спутника: AORE (Atlantic Ocean Region — East) и IOR (Indian Ocean Region). Они полностью повторяют работу спутников WAAS, только сигналы поправок передаются для территории Европы. Этот сервис поддерживают некоторые спутниковые геодезические приемники, например, Trimble R3 и GeoExplorer CE XT производства Trimble Navigation (США) и др.
Перед началом работ с использованием сервиса EGNOS необходимо ознакомиться с положением его спутников на небесной сфере. На рис. 7 показано положение спутников EGNOS для точки наблюдения в районе Санкт - Петербурга со следующими координатами на небесной сфере: широта 59059’ и долгота 29042’. Возвышение спутников над горизонтом для этой точки наблюдений для спутника AORE составляет 220, для спутника IOR — 170. Для точки наблюдения в районе Волоколамска с широтой 56002’ и долготой 35051’ возвышение над горизонтом для спутника AORE составляет 240, для спутника IOR — 220. Местоположение спутников с течением времени не меняется.
| Рис.7 Положение спутников AORE и IOR на небесной сфере для района Санкт - Петербурга |
С местоположением спутников EGNOS необходимо ознакомиться, для прогнозирования возможной потери сигнала спутника в процессе съемки из - за закрытия его искусственными или естественными препятствиями.
С помощью утилиты Planning рассчитывается значение коэффициента потери точности DOP, на основании которого выбирается благоприятный временной интервал спутниковых определений, когда можно одновременно наблюдать не менее четырех спутников GPS. При значении DOP больше шести не рекомендуется проводить измерения, так как могут быть получены некачественные (ошибочные) данные. На рис. 8 представлен график значений факторов DOP на 9 декабря 2006 г. для района Санкт - Петербурга, откуда видно, что измерения не рекомендуется проводить в 8 и 17 часов (DOP равен 8). Причем в 17 часов выполнить качественные спутниковые измерения будет невозможно .
| Рис.2 График прогнозируемых значений факторов снижения точности DOP для района Санкт - Петербурга |
Топографо - геодезические работы еще часто выполняются на основе систем координат, использующих эллипсоид Крассовского (СК–42, СК–63). Поэтому перед началом работ необходимо в программное обеспечение спутникового приемника ввести параметры координатных преобразований из системы WGS–84 в СК–42(СК–63). Преобразование координат из системы WGS–84 в координаты референцных систем, принятых в РФ, должно осуществляться последовательным преобразованием координат первоначально в систему ПЗ–90, а затем в координаты референцной системы.
Однако последовательные преобразования не могут быть реализованы в таких программах обработки спутниковых наблюдений, как, например, Trimble Digital Fieldbook или TerraSync. Опираясь на опыт выполнения работ в европейской части России, рекомендуем использовать следующие значения параметров координатных преобразований из WGS–84 в СК–42 (или СК–63):
— DX = +26,600 м;
DY = –134,800 м;
DZ = –77,300 м;
— RX = –0,17000”;
RY= –0,39000”;
RZ= –0,83000”;
— коэффициент масштабного перехода (ppm) –0,06.
Эти параметры координатных преобразований из WGS–84 в СК–42 (СК–63) не противоречат, а только подтверждают положения, изложенные в [2]. Необходимо добавить, что приведенные выше параметры координатных преобразований применимы и в программах обработки результатов спутниковых измерений, таких как Trimble Geomatics Office, GPS Pathfinder Office, Ashtech Solutions, и в программах для постобработки спутниковых определений.
Замена традиционных средств измерений на электронные привела к появлению новых методов и технологий геодезиче¬ских работ. Спутниковые радионавигацион¬ные системы (СРНС) и геодезических приемников принципиально изме¬нило методику построения опорных геодезических сетей. Термин "GPS технологии" (или ГЛОНАСС/GPS технологии) применяется для способов определения координат с применением спутниковых радионавигационных систем– американской системы GPS и российской ГЛОНАСС. Каждая из этих СРНС при полном развертывании состоит из 24 спутников, вращающихся на орбитах с высотой около 20000 км. Спутники непрерывно передают сигналы, содержащие информацию об их положении и точном времени, а также дальномерные коды, позволяющие измерить расстояния.
Содержание
Введение. 2
Глава 1. Геодезические работы с использованием спутниковых систем. 4
1.1. Спутниковые радионавигационные системы 4
1.2Пространственная геоцентрическая система координат 6
1.3Геодезические приёмники 8
1.4Планирование и проведение измерений 13
1.5Обработка результатов спутниковых измерений 22
Заключение. 29
Список литературы 31
Прикрепленные файлы: 1 файл
курсачччч.docx
Глава 1. Геодезические работы с использованием спутниковых систем. 4
1.1. Спутниковые радионавигационные системы 4
1.2Пространственная геоцентрическая система координат 6
1.3Геодезические приёмники 8
1.4Планирование и проведение измерений 13
1.5Обработка результатов спутниковых измерений 22
Список литературы 31
Введение.
Традиционные методы геодезических измерений и графического отображения полученной информации на бумажных носителях остались в прошлом. Современное геодезическое обеспечение инженерно-строительных изысканий, проектирования и строительства различных объектов, а также инвентаризации, кадастра и оценки объектов недвижимости базируется на использовании принципиально новых геодезических приборов и технологий, геодезических информационных систем пространственных баз данных. Все полевые измерения и съёмки выполняются сейчас электронными приборами с автоматической регистрацией результатов, автоматизированы и все последующие процессы геодезического производства.
Замена традиционных средств измерений на электронные привела к появлению новых методов и технологий геодезических работ. Спутниковые радионавигационные системы (СРНС) и геодезических приемников принципиально изменило методику построения опорных геодезических сетей. Термин "GPS технологии" (или ГЛОНАСС/GPS технологии) применяется для способов определения координат с применением спутниковых радионавигационных систем– американской системы GPS и российской ГЛОНАСС. Каждая из этих СРНС при полном развертывании состоит из 24 спутников, вращающихся на орбитах с высотой около 20000 км. Спутники непрерывно передают сигналы, содержащие информацию об их положении и точном времени, а также дальномерные коды, позволяющие измерить расстояния.
Определение координат пользователя СРНС производится с помощью специальных спутниковых приемников, измеряющих либо время прохождения сигнала от нескольких спутников до приемника, либо фазу сигнала на несущей частоте. В первом случае расстояния измеряются с метровым уровнем точности, во втором случае – с миллиметровым уровнем точности. При этом реализован однонаправленный метод измерения расстояний, поскольку и GPS, и ГЛОНАСС являются беззапросными спутниковыми системами, допускающими одновременное использование их многими пользователями.
Каждый приемник может производить измерения либо независимо от других приемников, либо синхронно с другими приемниками. В первом случае, достигается точность однократного определения координат по кодам порядка 1-15 м. Такой способ идеально подходит для навигации любых перемещающихся объектов, от пешеходов до ракет. Однако более высокую точность можно получать при одновременных наблюдениях спутников несколькими приемниками по фазовым измерениям. При таком способе наблюдений один из приемников обычно располагается в пункте с известными координатами. Тогда положение остальных приемников можно определить относительно первого приемника с точностью нескольких миллиметров. При этом возможны измерения на расстояниях от нескольких метров до тысяч километров. Кроме определения местоположения границ земельного участка также необходимы кадастровый учет и государственная регистрация.
Принципиальным достоинством спутниковых методов позиционирования является возможность определения координат в любое время суток и в любой точке. Отпадает необходимость наличия прямой видимости между исходными и определяемыми пунктами. Это позволяет сократить сроки выполнения геодезических работ , снизилось влияние многих погрешностей, в том числе зависящих от исполнителя.
Глава 1. Геодезические работы с использованием спутниковых систем.
1.1. Спутниковые радионавигационные системы
Системы спутниковых определений координат первоначально развивались для навигационных целей и обеспечивали точность, не превышающую нескольких метров. Однако современные геодезические приёмники, методы математической обработки позволяют определять плановые координаты с погрешностями 5. 10 мм, высотные — 15. 30 мм и меньше. Их точность удовлетворяет требованиям построения опорных геодезических и межевых сетей, обеспечения кадастровых, землеустроительных, изыскательских и других инженерно-геодезических работ. При этом не требуется обеспечивать взаимную видимость между пунктами, строить над ними высокие сигналы, проводить комплекс точных угловых и линейных измерений. Спутниковые измерения выполняются в любых погодных условиях в течение нескольких минут, что существенно упростило производство полевых работ. Однако для наблюдения навигационных спутников (НС) небесный свод над приёмником должен быть достаточно свободен от застройки и растительности.
Структура, способы функционирования и требуемые характеристики подсистем СРНС во многом зависят от заданного качества навигационного обеспечения и выбранной концепции навигационных измерений. Для достижения таких важнейших качеств, как непрерывность и высокая точность навигационных определений, в глобальной рабочей зоне в составе со временной СРНС типа ГЛОНАСС(глобальная навигационная спутниковая система Р.Ф) и GPS(США) функционируют три основные под системы космических аппаратов (ПКА), состоящая из навигационных спутников (НС):космическим сегментом; контроля и управления ;сегмент потребителей СРНС(аппаратура потребителя) . Разнообразие видов приемоиндикаторов СРНС обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Основной операцией, выполняемой в СРНС с помощью этих сегментов, является определение пространственных координат местоположения потребителей и времени, т. е. пространственно-временных координат (ПВК). Эту операцию осуществляют в соответствии с концепцией независимой навигации, предусматривающей вычисление искомых навигационных параметров непосредственно в аппаратуре потребителя. В рамках этой концепции в СРНС выбран позиционный способ определения местоположения потребителей на основе пассивных дальномерных измерений по сигналам нескольких навигационных искусственных спутников Земли с известны микоординатами .
Высокая точность определения местоположения потребителей обусловлена многими факторами, включая взаимное расположение спутников и пара метры их навигационных сигналов. Структура космического сегмента обеспечивает для потребителя постоянную видимость требуемого числа спутников.
Рис.1 Спутник ГЛОНАССА
1.2Пространственная геоцентрическая система координат
Если за начало координат принят центр общего земного эллипсоида (центр масс Земли), а ось Z совмещена с осью вращения Земли, то такую систему называют Геоцентрической. Она применяется при решении геодезических задач, связанных с обширными частями земной поверхности или со всей фигурой Земли (например, в космической геодезии).
В системе геоцентрических координат положение точки A на поверхности эллипсоида определяют геодезической долготой L и геоцентрической широтой Ф, равной углу между радиус-вектором с и плоскостью экватора
В геоцентрической системе пространственные прямоугольные и эллипсоидальные координаты связаны соотношениями:
X=pcosῳ cosL; Y=pcosῳsinL; Z=psinῳ , где р=R+h; R-средний радиус земли; h-высота пункта над поверхностью элиппсоида ;
ῳ-геоцентрическая высота; L- геодезическая долгота. При решении некоторых задач на поверхности эллипсоида вместо геодезической
широты B или геоцентрической широты удобно использовать приведенную широту U, оставляя в качестве второй координаты геодезическую долготу L :
Из центра меридианного эллипса EPE1P1 проведена окружность EP’E1P’1 радиусом , равным большой полуоси А. точка А´ получена пересечением окружности линией АА1, параллельной малой оси эллипса РР1, АС-нормаль к поверхности эллипсоида в точке А . Тогда приведенная широта U определяется как угол , составленный радиусом – вектора ОА´ с плоскостью экватора. Геодезическая , приведенная и геоцентрическая широты связаны между собой простыми соотношениями : tgB=tgU=tgῳ
1.3Геодезические приёмники
Для определения координат точек местности с точностью, удовлетворяющей геодезическим требованиям, применяются специальные геодезические приёмники. Такие приёмники осуществляют захват сигнала от навигационных спутников, измеряют по фазе несущей частоты псевдодальность, по ней и по дополнительно полученной информации вычисляются координаты.
В геодезии используются фазовые приёмники, так как в настоящее время только они обеспечивают миллиметровую и сантиметровую точность позицирования. Наряду с фазовыми существуют кодовые приёмники, работающие по Р- и С/А-кодам, они широко распространены в навигации, но в геодезии имеют ограниченное применение. Следует отметить, что современные геодезические приёмники измерения ведут по фазе и дополнительно по кодам сигнала, ускоряя тем самым процесс позицирования.
Приёмники подразделяют на двухсистемные, работающие по спутникам ГЛОНАСС/ GPS одновременно или раздельно, и односистемные, работающие только по НС одной системы. В настоящее время наиболее распространены в геодезии односистемные GPS -приёмники. Вместе с тем в РФ с 2003 года начат выпуск двухсистемного приемника ГЕО-161, имеющего ряд преимуществ, к двухсистемным относятся также приёмники типа Lеgасу-Е-2484 и другие. С развитием систем ГЛОНАСС, GPS, GALILEO многосистемные приёмники в геодезических работах станут более перспективными.
Кроме того, геодезические приёмники подразделяют на одно- и двухчастотные, одно- и многоканальные. В одночастных измерения псевдодальности выполняются по одной частоте сигнала, а в двухчастотных — на частотах L1 и L2 одновременно. Двухчастотные приёмники требуют меньше времени на инициализацию и позицирование, обеспечивают высокую точность. К двухчастотным приёмникам относятся Тrіmblе 4000851, Тrimblе 5700, Тrimble 5800, 2-МАХ и другие.
Одноканальные приемники захват сигналов осуществляют последовательно по каждому НС. Многоканальные одновременно отслеживают и принимают сигналы от созвездия спутников, включающего до 8— 12 НС. В настоящее время выпускаются, в основном, многоканальные приемники, которые имеют дополнительные каналы приема сигналов от геостационарных спутников.
а ) Сигнал НС б) Сигнал НС
Рис. 4 а) режим постобработки; 6) режим реального времени;
3 — генератор опорного сигнала;
5— блок первичной обработки;
7 - контроллер с ПО режима КТК;
8 — блок связи с базовой станцией
На рисунке 4 представлены две блок-схемы приёмников, которые различаются применяемым режимом обработки результатов измерений. Если приёмник работает в режиме постобработки, то результаты измерений заносятся в блок памяти приёмника, а по завершении наблюдений передаются в компьютер для постобработки. Для передачи в компьютер приёмник имеет специальные порты подключения и кабель. При полевых работах можно к приёмнику подключить контроллер, с клавиатуры которого вносится информация о пунктах, особенностях наблюдений, высоте антенны.
Если приёмник работает в режиме реального времени, то подключение контроллера обязательно. Кроме того, приёмник должен иметь блок связи, по которому передаётся необходимая для обработки информация с базового пункта на определяемый. Контроллер должен быть оснащён программным обеспечением обработки в режиме РТК. Для связи используют специальные радиомодемы (например, Тrimmark, Trimble) или каналы мобильной связи.
В настоящее время геодезические приёмники выпускаются разных конструкций. В ряде приборов антенный блок.
Определен от приемника , применяются легкие антенны , которые устанава-ются на раздвижной вехе и могут быть вынесены над закрывающими небосвод объектами. К таким приёмникам относятся Тrimble5700, Тhales 6500, РгоМаrк-2 и другие. В других приборах (Тrimble 4600STRATUS Sоkkіа) антенна и приёмник объединены в одном корпусе, куда вставляются также элементы питания. Такие приёмники имеют только панель управления, состоящую из клавиши включения и небольшого табло. Наиболее информативна панель управления приёмников Stratus, которая позволяет контролировать автоматически протекающий процесс измерений .
В геодезических приёмниках применяются специальные конструкции антенн с высокой стабильностью фазового центра, чувствительные к GPS сигналам. Для подавления многолучёвости от местных предметов антенны имеют отражающее устройство, применяются микрополосковые конструкции. Такие антенны с высокой стабильностью фазового центра и подавлением влияния многолучёвости могут обеспечивать миллиметровую точность определения координат.
В качестве источников питания используются компактные литиево-ионные аккумуляторы(Stratus) или элементы типа АА(Тrimble 4600). Геодезические приёмники устанавливаются над точкой на штатив) или на вехе с круглым уровнем . При установке на вехе применяется бипод, который делает положение вехи и приемника устойчивым .

Системы GPS слежения
Спутниковые системы мониторинга

Спутниковые системы
ГЛОНАСС
ВАЖНО. У российской системы устройств в космосе всего 24, а у американской – до 32, поэтому площадь покрытия мира составляет 70 %.
Общие принципы определения координат
ВАЖНО. Данных с одного аппарата недостаточно. Для максимальной точности необходимы как минимум 4 устройства, находящиеся в разных местах.
Пересечение сигнала 4 и более спутников позволяет с минимальной погрешностью определить, где находится человек. Некоторые программы навигации также учитывают расстояние до вышек сотовой связи, данные встроенного компаса и акселерометра и даже скорость движения того, кто запрашивает координаты. Но какие бы технологии ни использовались, есть много факторов, влияющих на работу позиционирования.

Орбиты спутников GPS и GLONASS
Точность позиционирования
При определении координат погрешность ГЛОНАСС составляет 2 – 6 метров, у GPS – 2 – 4 м. На работу систем влияет целый ряд факторов.
Факторы влияния
Эти факторы касаются только работы спутника, а еще есть те, которые связаны конкретно с человеком:
- Качество модуля GPS в электронном устройстве.
- Местонахождение человека в пространстве. Создаются искажения и отражения при пребывании рядом с сооружениями, внутри помещений.
- Драйвер в ОС в смартфоне.
Система дифференциальной коррекции
Поскольку на работу спутника влияют некоторые факторы, была придумана система коррекции – СДКМ. Из чего она состоит, показано в таблице.
| Компонент | Цель |
| Сеть станций сбора измерений. В России их около 56 | Сбор первичной информации с подвижного спутника и отправка ее в центр обработки |
| Центр обработки данных или ЦОД | В них фиксируется и исправляется погрешность (те самые 2–6 м), обеспечивается доставка информации пользователю |
| Комплекс доставки данных до потребителя, состоящий из неподвижных спутников и нескольких станций на земле | На Земле на специальных станциях данные обрабатываются и отправляются на особые невращающиеся спутники, которые и передают определенные координаты человеку |
Выше вся система показана в упрощенном виде для простоты понимания, на самом деле, она включает в себя десятки станций, в них работают тысячи специалистов. И все для того, чтобы увеличить точность навигационных систем до 10–20 см.
Совместно с GPS функционирует QZSS – японская система, благодаря которой снижается погрешность при передаче данных.
Как повысить точность
Некоторые области жизни, например, геодезия, не терпят ошибок в точности. Ряд мер может принять сам человек, чтобы снизить вероятность ошибки:
ВНИМАНИЕ. Мало что поможет, если находиться в момент определения координат в помещении, под землей или рядом с высотными зданиями. Сигнал от спутника будет не только искажен, но и отражен. Из-за этого точная геолокация будет невозможна.
Преимущества двойного геопозиционирования GPS/ГЛОНАСС
Если определять свое положение по 2 системам сразу, то есть несколько преимуществ такого решения:
Эра космоса наступила. И околоземное пространство используется не только для исследований, но и для помощи в навигации, проведения межевания и других нужд. Главное – знать о точности каждой из систем, как работает GPS и правильно ими пользоваться.
* Данная работа не является научным трудом, не является выпускной квалификационной работой и представляет собой результат обработки, структурирования и форматирования собранной информации, предназначенной для использования в качестве источника материала при самостоятельной подготовки учебных работ.
Во многих сферах нашей жизни мы можем столкнуться со спутниковой системой навигации – GPS (Global Position System). Хотя она и была разработана для решения военных задач, ее гражданское применение растет очень быстро. Эта система нашла широкое применение, как в обычной жизни, так и в решении достаточно специфичных задач, например, как дополнительная защита от угона автомашин. Мы можем встретить GPS приемники как на суши и море, так и в воздухе.
Для решения разных задач применяются различные типы приемников, но, как ни разнились сферы применения GPS, всех их объединяет одно - необходимость в точном определении координат. Можно отметить что ошибки, которые приводят к неточности в определении положения при решении разных задач, в большинстве своем, одни и те же. Но методы, которые применяются для их исправления, зачастую, имеют большие отличия. Это связано главным образом с тем, что мы имеем различные требования к точности и условия, при которых происходит позиционирование; также большую роль играет цена приемника.
В своей работе я постараюсь проанализировать большинство видов ошибок приводящих к неточности в определении координат, их величину, различные методы исправления и сферу применения этих методов, рассмотрю принципы работы GPS и ее основные характеристики, что необходимо для лучшего понимания поставленной задачи. Также будут приведены планы модернизации этой системы, так как это приведет к созданию новых методов исправления ошибок и усовершенствованию старых.
1. История создания GPS
С давних времён путешественники задавались вопросом: как определить своё местоположение на Земле? Средствами для ориентирования на местности для него служили камни, пометки на деревьях, горы, служащие началом отсчета. Определение ориентиров было несложной задачей на суше, однако, когда человек начал исследовать океанские просторы, где единственными видимыми объектами были Солнце, Луна и звезды, ориентирование стало делом жизни и смерти. Как и следовало ожидать, эти небесные объекты стали служить "ориентирами" и началась эра навигации по звездам. Однако погодные условия не всегда были на руку исследователям, поэтому сбиться с курса не представляло особого труда. С появлением компаса задача существенно упростилась. Путешественник уже в меньшей мере зависел от погоды.
Эра радио открыла новые возможности перед человеком. С появлением радиолокационных станций, когда стало возможным измерять параметры движения и относительное местоположение объекта по отражённому от его поверхности лучу радиолокатора, встал вопрос о возможности измерения параметров движения объекта по излучаемому сигналу. Учёные экспериментально подтвердила возможность определения параметров движения искусственного спутника Земли (ИСЗ) по результатам измерений доплеровского сдвига частоты сигнала, излучаемого этим спутником. Но, что самое главное, была установлена возможность решения обратной задачи — нахождения координат приёмника по измеренному доплеровскому сдвигу сигнала, излучаемого с ИСЗ, если параметры движения и координаты этого спутника известны.
Кроме того, в этих системах невозможен непрерывный режим работы. Ввиду того, что системы расположены на низких орбитах, время, в течение которого спутник находится в поле видимости потребителя, не превышает одного часа. Кроме того, время между прохождением различных спутников зоны видимости потребителя зависит от географической широты, на которой он находится, и может составить величину от 35 до 90 минут. Уменьшение этого интервала путём наращивания числа спутников невозможно, потому что все спутники излучают сигналы на одной и той же частоте.
Следовательно, спутниковые навигационные системы второго поколения обладают рядом существенных недостатков. В первую очередь — недостаточная точность определения координат динамичных объектов. К недостатку можно отнести также отсутствие непрерывности в измерениях.
Одной из основных проблем, возникающих при создании спутниковых систем, обеспечивающих навигационные определения по нескольким спутникам, является взаимная синхронизация сигналов (шкал времени) спутников с необходимой точностью. Рассогласование опорных генераторов спутников на 10 нс приводит к ошибке в определении координат потребителя 10–15 м . Второй проблемой, с которой столкнулись разработчики при создании высокоорбитальных спутниковых навигационных систем, стало высокоточное определение и прогнозирование параметров орбит ИСЗ. Аппаратура приёмника, измеряя задержки сигналов от разных спутников, вычисляет координаты потребителя.
Для этих целей в 1967 году ВМС США была разработана программа, по которой был осуществлён запуск спутника TIMATION-I, а в 1969 году — спутника TIMATION-II. На борту этих спутников использовались кварцевые генераторы. В то же время, ВВС США параллельно вели свою программу по использовании широкополосных сигналов, модулированных псевдошумовым кодом (PRN). Свойства такого кода позволяют использовать одну частоту сигнала для всех спутников, с кодовым разделением сигналов от различных спутников. Позднее, в 1973 году две программы были объединены в одну общую под названием “Navstar-GPS”. К 1996 году развёртывание системы было завершено /1/.
Основные источники ошибок спутниковых измерений и методы ослабления их влияния
Основные факторы, влияющие на точность спутниковых определений: 1) ошибки, связанные с неточностью знания исходных данных, из которых определяющая роль принадлежит погрешностям знания эфемерид спутников; 2) влияние внешней среды; 3) инструментальные источники ошибок; 4) геометрический фактор, который определяет влияние на точность измерений взаимного расположения наблюдаемых спутников и приемников. 5) переход между системами координат, т. е. ошибки связанные с переходом от системы, в которой функционируют соответствующая система (GPS или ГЛОНАСС) к интересующей потребителя координатной системе.
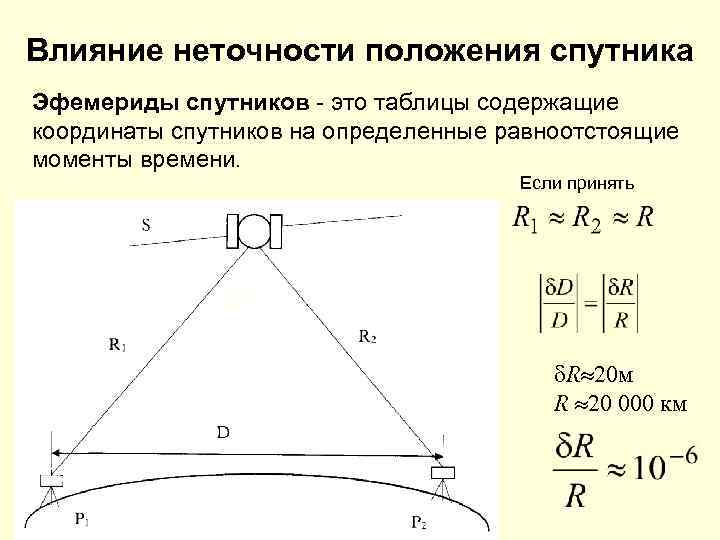
Влияние неточности положения спутника Эфемериды спутников - это таблицы содержащие координаты спутников на определенные равноотстоящие моменты времени. Если принять R 20 м R 20 000 км
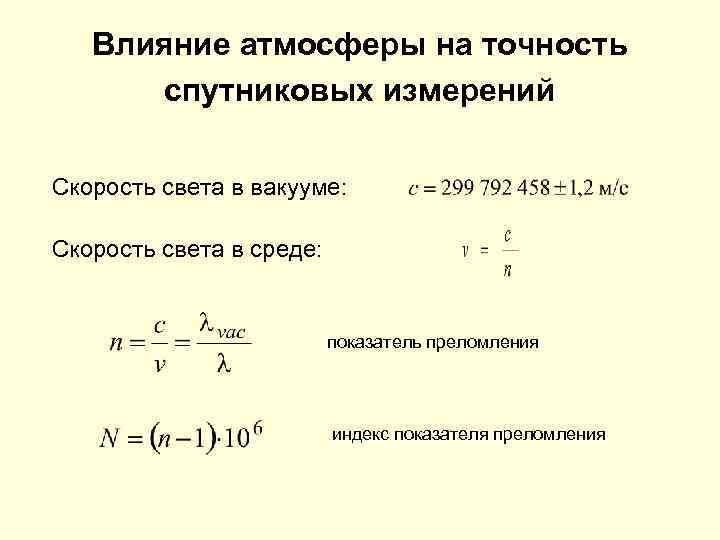
Влияние атмосферы на точность спутниковых измерений Скорость света в вакууме: Скорость света в среде: показатель преломления индекс показателя преломления
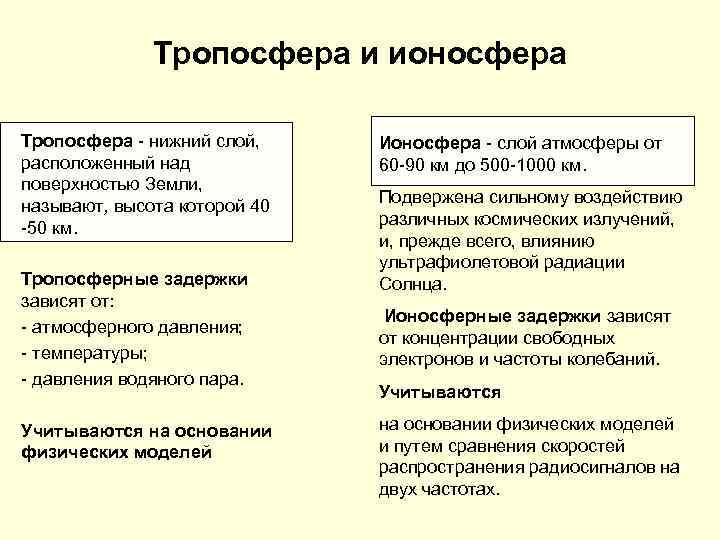
Тропосфера и ионосфера Тропосфера - нижний слой, Ионосфера - слой атмосферы от расположенный над 60 -90 км до 500 -1000 км. поверхностью Земли, называют, высота которой 40 Подвержена сильному воздействию -50 км. различных космических излучений, и, прежде всего, влиянию ультрафиолетовой радиации Тропосферные задержки Солнца. зависят от: Ионосферные задержки зависят - атмосферного давления; от концентрации свободных - температуры; электронов и частоты колебаний. - давления водяного пара. Учитываются на основании физических моделей и путем сравнения скоростей распространения радиосигналов на двух частотах.

Влияние тропосферной рефракции для средних условий (T=15°C) на измеряемые расстояния, м Угол 90° 20 15° 10° 5° возвышения Тропосферные задержки 2, 51 7, 29 9, 58 14, 04 25, 82 Влияние ионосферных задержек при измерении 1 -й частоты, и остаточные ошибки при измерении 2 -х частот 1 частота 2 частоты Максимальное 30 м 4, 5 см значение Среднее значение 3 м 0, 3 см
Многопутность
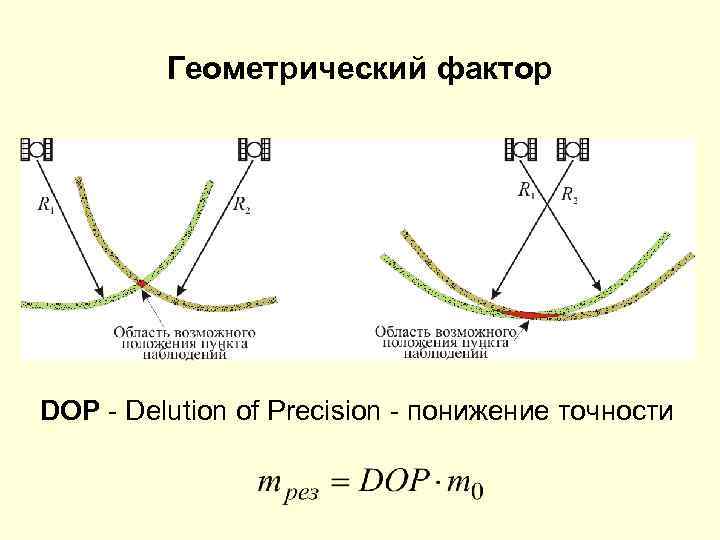
Геометрический фактор DOP - Delution of Precision - понижение точности
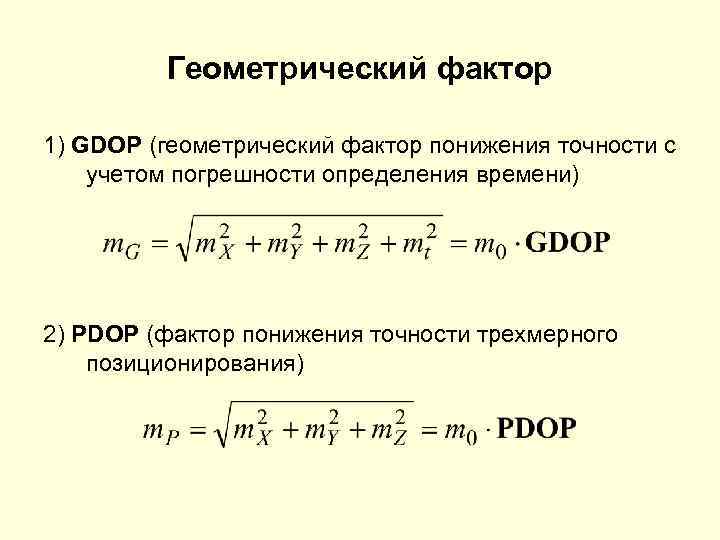
Геометрический фактор 1) GDOP (геометрический фактор понижения точности с учетом погрешности определения времени) 2) PDOP (фактор понижения точности трехмерного позиционирования)
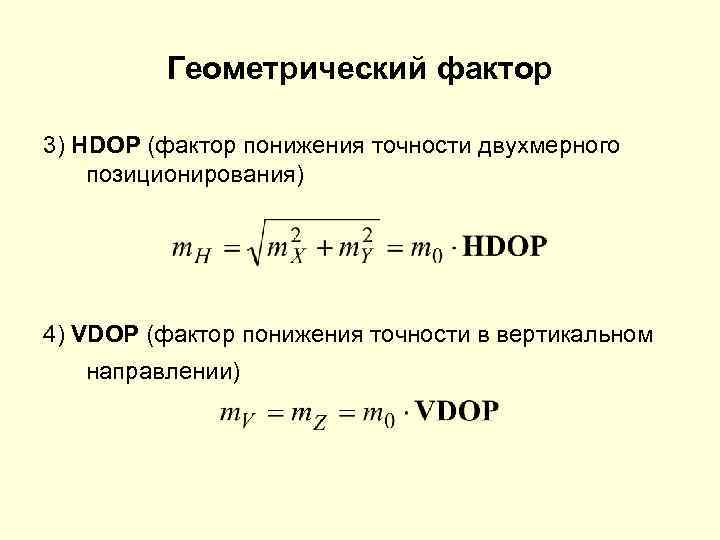
Геометрический фактор 3) HDOP (фактор понижения точности двухмерного позиционирования) 4) VDOP (фактор понижения точности в вертикальном направлении)
Геометрический фактор
Инструментальные источники ошибок • погрешность хода часов на спутнике и в приемнике; • особенности работы передающей и приемной антенн; • временные задержки в аппаратуре передатчика и приемника; • несовершенство работы отсчетных устройств, с помощью которых определяется время или фазовый сдвиг.
Читайте также: