
Энергия деформирования тела реферат
Обновлено: 05.07.2024
Для характеристики различных форм движения материи вводятся соответствующие виды энергии, например: механическая, внутренняя, энергия электростатических, внутриядерных взаимодействий и др.
Энергия подчиняется закону сохранения, который является одним из важнейших законов природы.
Механическая энергия Е характеризует движение и взаимодействие тел и является функцией скоростей и взаимного расположения тел. Она равна сумме кинетической и потенциальной энергий.
Кинетическая энергия
Рассмотрим случай, когда на тело массой m действует постоянная сила \(~\vec F\) (она может быть равнодействующей нескольких сил) и векторы силы \(~\vec F\) и перемещения \(~\vec s\) направлены вдоль одной прямой в одну сторону. В этом случае работу силы можно определить как A = F∙s. Модуль силы по второму закону Ньютона равен F = m∙a, а модуль перемещения s при равноускоренном прямолинейном движении связан с модулями начальной υ1 и конечной υ2 скорости и ускорения а выражением \(~s = \frac<\upsilon^2_2 - \upsilon^2_1>\) .
Отсюда для работы получаем
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела.
Кинетическая энергия обозначается буквой Ek.
Тогда равенство (1) можно записать в таком виде:
Теорема о кинетической энергии
работа равнодействующей сил, приложенных к телу, равна изменению кинетической энергии тела.
Так как изменение кинетической энергии равно работе силы (3), кинетическая энергия тела выражается в тех же единицах, что и работа, т. е. в джоулях.
Если начальная скорость движения тела массой m равна нулю и тело увеличивает свою скорость до значения υ, то работа силы равна конечному значению кинетической энергии тела:
Физический смысл кинетической энергии
кинетическая энергия тела, движущегося со скоростью υ, показывает, какую работу должна совершить сила, действующая на покоящееся тело, чтобы сообщить ему эту скорость.
Потенциальная энергия
Потенциальная энергия – это энергия взаимодействия тел.
Потенциальная энергия поднятого над Землей тела – это энергия взаимодействия тела и Земли гравитационными силами. Потенциальная энергия упруго деформированного тела – это энергия взаимодействия отдельных частей тела между собой силами упругости.
Потенциальными называются силы, работа которых зависит только от начального и конечного положения движущейся материальной точки или тела и не зависит от формы траектории.
При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие.
Силы, работа которых зависит от формы траектории, называются непотенциальными. При перемещении материальной точки или тела по замкнутой траектории работа непотенциальной силы не равна нулю.
Потенциальная энергия взаимодействия тела с Землей
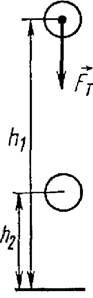
Найдем работу, совершаемую силой тяжести Fт при перемещении тела массой m вертикально вниз с высоты h1 над поверхностью Земли до высоты h2 (рис. 1). Если разность h1 – h2 пренебрежимо мала по сравнению с расстоянием до центра Земли, то силу тяжести Fт во время движения тела можно считать постоянной и равной mg.
Так как перемещение совпадает по направлению с вектором силы тяжести, работа силы тяжести равна
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
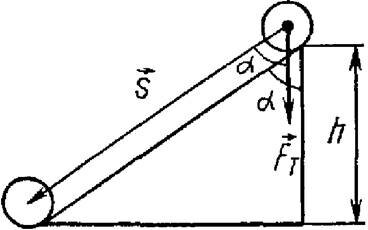
Рассмотрим теперь движение тела по наклонной плоскости. При перемещении тела вниз по наклонной плоскости (рис. 2) сила тяжести Fт = m∙g совершает работу
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
где h – высота наклонной плоскости, s – модуль перемещения, равный длине наклонной плоскости.
Движение тела из точки В в точку С по любой траектории (рис. 3) можно мысленно представить состоящим из перемещений по участкам наклонных плоскостей с различными высотами h’, h’’ и т. д. Работа А силы тяжести на всем пути из В в С равна сумме работ на отдельных участках пути:
\(~A = m \cdot g \cdot h' + m \cdot g \cdot h'' + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h' + h'' + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
где h1 и h2 – высоты от поверхности Земли, на которых расположены соответственно точки В и С.
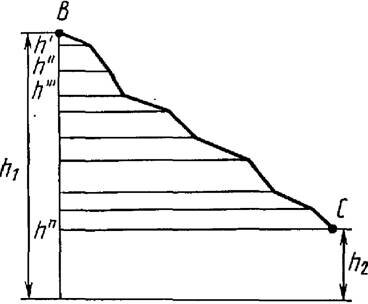
Равенство (7) показывает, что работа силы тяжести не зависит от траектории движения тела и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях.
При движении вниз работа силы тяжести положительна, при движении вверх – отрицательна. Работа силы тяжести на замкнутой траектории равна нулю.
Равенство (7) можно представить в таком виде:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Физическую величину, равную произведению массы тела на модуль ускорения свободного падения и на высоту, на которую поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли.
Работа силы тяжести при перемещении тела массой m из точки, расположенной на высоте h2, в точку, расположенную на высоте h1 от поверхности Земли, по любой траектории равна изменению потенциальной энергии взаимодействия тела и Земли, взятому с противоположным знаком.
Потенциальная энергия обозначается буквой Еp.
Значение потенциальной энергии тела, поднятого над Землей, зависит от выбора нулевого уровня, т. е. высоты, на которой потенциальная энергия принимается равной нулю. Обычно принимают, что потенциальная энергия тела на поверхности Земли равна нулю.
При таком выборе нулевого уровня потенциальная энергия Еp тела, находящегося на высоте h над поверхностью Земли, равна произведению массы m тела на модуль ускорения свободного падения g и расстояние h его от поверхности Земли:
\(~E_p = m \cdot g \cdot h\) . (10)
Физический смысл потенциальной энергии взаимодействия тела с Землей
потенциальная энергия тела, на которое действует сила тяжести, равна работе, совершаемой силой тяжести при перемещении тела на нулевой уровень.
В отличие от кинетической энергии поступательного движения, которая может иметь лишь положительные значения, потенциальная энергия тела может быть как положительной, так и отрицательной. Тело массой m, находящееся на высоте h, где h \(~E_p = -m \cdot g \cdot h\) .
Потенциальная энергия гравитационного взаимодействия
Потенциальная энергия гравитационного взаимодействия системы двух материальных точек с массами m и М, находящихся на расстоянии r одна от другой, равна
где G – гравитационная постоянная, а нуль отсчета потенциальной энергии (Еp = 0) принят при r = ∞.
Потенциальная энергия гравитационного взаимодействия тела массой m с Землей, где h – высота тела над поверхностью Земли, Me – масса Земли, Re – радиус Земли, а нуль отсчета потенциальной энергии выбран при h = 0.
При том же условии выбора нуля отсчета потенциальная энергия гравитационного взаимодействия тела массой m с Землей для малых высот h (h « Re) равна
\(~E_p = m \cdot g \cdot h\) ,
где \(~g = G \cdot \frac\) – модуль ускорения свободного падения вблизи поверхности Земли.
Потенциальная энергия упруго деформированного тела
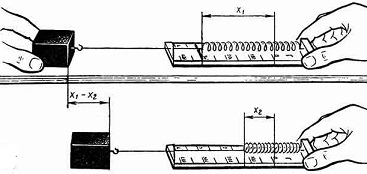
Вычислим работу, совершаемую силой упругости при изменении деформации (удлинения) пружины от некоторого начального значения x1 до конечного значения x2 (рис. 4, б, в).
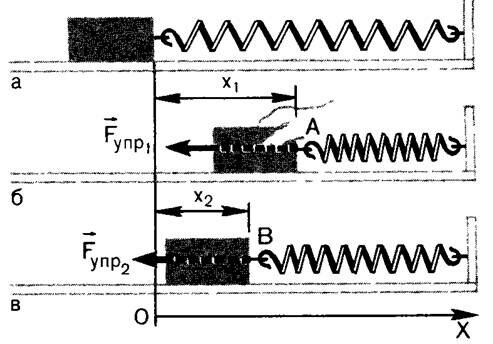
Сила упругости изменяется в процессе деформации пружины. Для нахождения работы силы упругости можно взять среднее значение модуля силы (т.к. сила упругости линейно зависит от x) и умножить на модуль перемещения:
\(~A = F_ \cdot (x_1 - x_2)\) , (13)
Физическая величина, равная половине произведения жесткости тела на квадрат его деформации, называется потенциальной энергией упруго деформированного тела:
Из формул (14) и (15) следует, что работа силы упругости равна изменению потенциальной энергии упруго деформированного тела, взятому с противоположным знаком:
Если x2 = 0 и x1 = х, то, как видно из формул (14) и (15),
Физический смысл потенциальной энергии деформированного тела
потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Закон сохранения энергии в механических процессах
Потенциальная энергия характеризует взаимодействующие тела, а кинетическая энергия – движущиеся тела. И потенциальная, и кинетическая энергия изменяются только в результате такого взаимодействия тел, при котором действующие на тела силы совершают работу, отличную от нуля. Рассмотрим вопрос об изменениях энергии при взаимодействиях тел, образующих замкнутую систему.
Замкнутая система – это система, на которую не действуют внешние силы или действие этих сил скомпенсировано. Если несколько тел взаимодействуют между собой только силами тяготения и силами упругости и никакие внешние силы на них не действуют, то при любых взаимодействиях тел работа сил упругости или сил тяготения равна изменению потенциальной энергии тел, взятому с противоположным знаком:
По теореме о кинетической энергии, работа тех же сил равна изменению кинетической энергии:
Из сравнения равенств (17) и (18) видно, что изменение кинетической энергии тел в замкнутой системе равно по абсолютному значению изменению потенциальной энергии системы тел и противоположно ему по знаку:
Закон сохранения энергии в механических процессах:
сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой силами тяготения и си-лами упругости, остается постоянной.
Сумма кинетической и потенциальной энергии тел называется полной механической энергией.
Основное содержание закона сохранения энергии заключается не только в установлении факта сохранения полной механической энергии, но и в установлении возможности взаимных превращений кинетической и потенциальной энергии тел в равной количественной мере при взаимодействии тел.
Приведем простейший опыт. Подбросим вверх стальной шарик. Сообщив начальную скорость υнач, мы придадим ему кинетическую энергию, из-за чего он начнет подниматься вверх. Действие силы тяжести приводит к уменьшению скорости шарика, а значит, и его кинетической энергии. Но шарик поднимается выше и выше и приобретает все больше и больше потенциальной энергии (Еp = m∙g∙h). Таким образом, кинетическая энергия не исчезает бесследно, а происходит ее превращение в потенциальную энергию.
В момент достижения верхней точки траектории (υ = 0) шарик полностью лишается кинетической энергии (Еk = 0), но при этом его потенциальная энергия становится максимальной. Дальше шарик меняет направление движения и с увеличивающейся скоростью движется вниз. Теперь происходит обратное превращение потенциальной энергии в кинетическую.
Закон сохранения энергии раскрывает физический смысл понятия работы:
работа сил тяготения и сил упругости, с одной стороны, равна увеличению кинетической энергии, а с другой стороны, – уменьшению потенциальной энергии тел. Следовательно, работа равна энергии, превратившейся из одного вида в другой.
Закон об изменении механической энергии
Если система взаимодействующих тел не замкнута, то ее механическая энергия не сохраняется. Изменение механической энергии такой системы равно работе внешних сил:
\(~A_ = \Delta E = E - E_0\) . (20)
где Е и Е0 – полные механические энергии системы в конечном и начальном состояниях соответственно.
Примером такой системы может служить система, в которой наряду с потенциальными силами действуют непотенциальные силы. К непотенциальным силам относятся силы трения. В большинстве случаев, когда угол между силой трения Ftr и элементарным перемещением Δr тела составляет π радиан, работа силы трения отрицательна и равна
где s12 – путь тела между точками 1 и 2.
Силы трения при движении системы уменьшают ее кинетическую энергию. В результате этого механическая энергия замкнутой неконсервативной системы всегда уменьшается, переходя в энергию немеханических форм движения.
Например, автомобиль, двигавшийся по горизонтальному участку дороги, после выключения двигателя проходит некоторый путь и под действием сил трения останавливается. Кинетическая энергия поступательного движения автомобиля стала равной нулю, а потенциальная энергия не увеличилась. Во время торможения автомобиля произошло нагревание тормозных колодок, шин автомобиля и асфальта. Следовательно, в результате действия сил трения кинетическая энергия автомобиля не исчезла, а превратилась во внутреннюю энергию теплового движения молекул.
Закон сохранения и превращения энергии
при любых физических взаимодействиях энергия превращается из одной формы в другую.
Иногда угол между силой трения Ftr и элементарным перемещением Δr равен нулю и работа силы трения положительна:
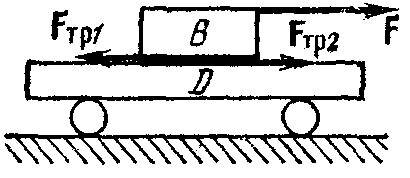
Пример 1. Пусть, внешняя сила F действует на брусок В, который может скользить по тележке D (рис. 5). Если тележка перемещается вправо, то работа силы трения скольжения Ftr2, действующей на тележку со стороны бруска, положительна:
Пример 2. При качении колеса его сила трения качения направлена вдоль движения, так как точка соприкосновения колеса с горизонтальной поверхностью двигается в направлении, противоположном направлению движения колеса, и работа силы трения положительна (рис. 6):
Потенциальная энергия имеется у системы взаимодействующих тел. Но отдельное деформированное тело также обладает такого типа энергией. В таком случае потенциальная энергия зависит от взаимного расположения частей тела.
Энергия упругой деформации
Если груз, подвешенный на проволоке, растягивает подвес и опускается, значит, сила тяжести совершает работу. За счет такой работы увеличивается энергия деформированного тела, которое перешло из ненапряженного состояния в напряженное. Получается, что при деформации внутренняя энергия тела увеличивается. Рост внутренней энергии тела заключается в увеличении потенциальной энергии, которая связана со взаимным расположением молекул тела. Если мы имеем дело с упругой деформацией, то после снятия нагрузки, дополнительная энергия исчезает, и за ее счет силы упругости совершают работу. В ходе упругой деформации температура твердых тел существенно не увеличивается. В этом состоит их значительное отличие от газов, которые при сжатии нагреваются. При пластической деформации твердые тела могут значительно увеличивать свою температуру. В повышении температуры, следовательно, кинетической энергии молекул, отражается рост внутренней энергии тела при пластической деформации. При этом увеличение внутренней энергии происходит также за счет работы сил, вызывающих деформацию.
Для того чтобы растянуть или сжать пружину следует выполнить работу ( ) равную:
![\[A=\frac<kx^2></p>
<p> \qquad (1)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-11514819fa82d76ff97331e60b14a8f4_l3.jpg)
где – величина характеризующая изменение длины пружины (удлинение пружины); – коэффициент упругости пружины. Данная работа идут на изменение потенциальной энергии пружины ( ):
![\[E_p=\frac<kx^2></p>
<p>\ \qquad (2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-65cf33a6daa9dea450000ac84638c513_l3.jpg)
При записи выражения (2) считаем, что потенциальная энергия пружины без деформации равна нулю.
Потенциальная энергия упруго деформированного стержня
Потенциальная энергия упруго деформированного стержня при его продольной деформации равна:
![\[E_p=\frac<E<\varepsilon ></p>
<p>^2>V\ \qquad (2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-3e1b1df7e2996d79eccc8f2c654c7093_l3.jpg)
где – модуль Юнга; – относительное удлинение; – объем стержня. Для однородного стержня при равномерной его деформации плотность энергии упругой деформации можно найти как:
![\[e_p=\frac<dE_p></p>
<p>=\frac^2> \qquad (3)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-2e0648c23c4e131247aab228ac316a19_l3.jpg)
Если деформация стержня является неравномерной, то при использовании формулы (3) для поиска энергии в точке стержня в эту формулу подставляют значение для рассматриваемой точки.
Плотность энергии упругой деформации при сдвиге находят, используя выражение:
![\[e_p=\frac<G<\gamma ></p>
<p>^2> \qquad (4)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-d88266c101df15b9b32e98896c84513c_l3.jpg)
где – модуль сдвига; – относительный сдвиг.
Примеры решения задач
| Задание | Камень, имеющий массу при выстреле из рогатки начал полет со скоростью . Каков коэффициент упругости резинового шнура рогатки, если при выстреле шнур получил удлинение ? Считайте, что изменением сечения шнура можно пренебречь. |
| Решение | В момент выстрела потенциальная энергия растянутого шнура ( ) переходит в кинетическую энергию камня ( ). По закону сохранения энергии можно записать: |
Потенциальную энергию упругой деформации резинового шнура найдем как:
![\[E_p=\frac<\beta <\left(\Delta l\right)></p>
<p>^2> \qquad (1.2)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-dab7688e520ea89e477ac3bfaad3f4c0_l3.jpg)
где – коэффициент упругости резины,
кинетическая энергия камня:
![\[E_k=\frac<mv^2></p>
<p> \qquad (1.3)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-5464450d7ddf9679e966eeb3a99d7bcc_l3.jpg)
![\[\frac<\beta <\left(\Delta l\right)></p>
<p>^2>=\frac \qquad (1.4)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-3adb468c534cc2ad538c891c6a69181a_l3.jpg)
Выразим коэффициент жесткости резины из (1.4):
![\[\beta =\frac<mv^2></p>
<p><<\left(\Delta l\right)>^2>\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-5d87d5bee727d3ea47861c4af4d7a76f_l3.jpg)
| Задание | Пружину, имеющую жесткость , сжимает сила, величина которой равна . Какова работа ( ) приложенной силы при дополнительном сжатии этой же пружины еще на ? |
| Решение | Сделаем рисунок. |

Работа силы по сжатию пружины равна изменению ее потенциальной энергии:
![\[A=E_<p2></p>
<p>-E_ \qquad (2.1)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-09bb9cceb7e7a9dbaf71efbaa8ac0c2b_l3.jpg)
Будем считать потенциальную энергию не сжатой пружины равной нулю, тогда:
![\[E_<p1></p>
<p>=\frac^2>;\ E_=\frac^2> \qquad \left(2.2\right) \]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-f03ddadae42bc8aa3931e6205456b7d0_l3.jpg)
Используя закон Гука:
![\[\left|F\right|=\left|F_<upr></p>
<p>\right|=k\Delta l\ \qquad (2.3)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-e98a1f6c171f3aa4b666662a60e9863a_l3.jpg)
выразим коэффициент жесткости пружины как:
![\[k=\frac<F></p>
<p> \qquad (2.4)\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-c3531726ce156903f0466e04634da15b_l3.jpg)
Используя выражения (2.2) найдем работу силы при дополнительном сжатии пружины:
![\[A=\frac<k\ <\left(\Delta l+\Delta x\right)></p>
<p>^2>-\frac^2>=\frac\left[<\left(\Delta l\right)>^2+2\Delta l\Delta x+<\left(\Delta x\right)>^2-<\left(\Delta l\right)>^2\right]=\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-09936094ff5e46bf8d599fb2d15e0254_l3.jpg)
![\[=\frac<k></p>
<p>\left(2\Delta l\Delta x+<\left(\Delta x\right)>^2\right)=\frac^2>\]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-437746549d783939f17dafa23cfbdb3f_l3.jpg)

Деформация тела
Код классификатора ОГЭ 1.12.
Деформация тела. Упругие и неупругие деформации. Закон упругой деформации (закон Гука).
Под нагрузкой материалы деформируются. Это связано с тем, что нагрузка вызывает перемещение частиц тела относительно друг друга. Деформация сопровождается изменением величин межатомных сил, мерой которого является механическое напряжение.
Определение деформации
Деформация тела – изменение формы или объёма тела под действием внешних сил.
Изменение длины тела Δl = l – l0, где l0 – начальная длина недеформированного тела, l – длина деформированного тела, принято называть величиной деформации.
Величина деформации – это скалярная физическая величина, которая может быть и положительной (тело растягивается), и отрицательной (тело сжимается).
Сила упругости направлена против смещения частей тела при деформации, возникает в деформируемом теле, но приложена к тому объекту, действием которого вызвана деформация.
Виды и типы деформации
Деформации разделяются на два типа :
- обратимые или упругие – исчезают после окончания действия приложенных сил;
- необратимые или неупругие (пластические, ползучести) – остаются после окончания действия приложенных сил.
Пластические деформации – это необратимые деформации, вызванные изменением напряжений. Пластичностью называется способность
вещества получать большие остаточные деформации без разрушения .
Деформации ползучести – это деформации, возникающие под действием длительного воздействия на тело постоянного напряжения.
Ползучесть и пластичность внешне схожи, но механизм ползучести имеет преимущественно диффузионную природу, а пластичность связана
с быстрым скольжением вдоль атомных плоскостей. При температурах, близких к температуре плавления, различие между этими видами деформации исчезает.
Наиболее простые виды деформации: 1) растяжение / сжатие, 2) сдвиг, 3) изгиб, 4) кручение. Практически любую деформацию можно представить одновременным наложением нескольких из указанных видов простой деформации, которые, в конечном счете, могут быть сведены к двум первым видам.

Упругие и неупругие деформации
Упругая деформация – деформация, при которой после прекращения действия силы размеры и форма тела полностью восстанавливаются. Деформация перестает быть упругой, если внешняя сила становится больше определенной величины, которая носит название предела упругости. При таком виде деформации происходит возврат частиц из новых положений равновесия в кристаллической решетке в старые. Тело полностью восстанавливает свои размеры и форму после снятия нагрузки.
Неупругая деформация — деформация, при которой происходит необратимая перестройка кристаллической решетки.
Упругие деформации весьма малы, и их измерение требует высокой точности. Измерение деформаций называется тензометрией.
Закон упругой деформации (закон Гука)
Закон Гука : Для тонкого растяжимого стержня модуль силы упругости прямо пропорционален величине деформации: Fупр = k |Δl| , где
k — коэффициент пропорциональности (коэффициент упругости), называемый жёсткостью;
Δl — абсолютное удлинение (сжатие) стержня.
Единица измерения жёсткости в системе СИ: Н/м. Коэффициент упругости зависит от материала, формы и размеров деформируемого тела. Можно выделить зависимость от размеров стержня (площади поперечного сечения — S и длины — L ) явно, записав коэффициент упругости как k = ES/L.
Величина E называется модулем Юнга. Если ввести относительное удлинение ε = Δl/l и нормальное напряжение в поперечном сечении σ = F/S, то закон закон Гука для относительных величин запишется как σ = Eε . В такой форме он справедлив для любых малых объёмов материала. Также при расчёте прямых стержней применяют запись закона Гука в относительной форме Δ l = Fl/ES .
Величины деформаций, для которых справедлив закон Гука, определяются экспериментально для каждого деформируемого тела.
Внимание! Линейная зависимость между модулем силы упругости и удлинением пружины (закон Гука) лежит в основе способа измерения силы с помощью динамометра.
При этом модуль измеряемой силы равен силе упругости пружины, которая, в свою очередь, рассчитывается по величине деформации. Для правильного измерения силы, растягивающей пружину динамометра, необходимо, чтобы во время измерения динамометр находился в покое или двигался прямолинейно и равномерно! Только в этом случае модуль измеряемой силы и модуль силы упругости равны друг другу.
Закон Гука — описывает поведение деформируемого твердого тела в зоне упругости. Закон Гука выполняется только при малых деформациях. При превышении предела пропорциональности связь между силой и деформацией становится нелинейной. Для многих сред закон Гука неприменим даже при малых деформациях.
Частные случаи силы упругости:
- Сила реакции опоры N: возникает при деформации опоры, приложена к телу, деформирующему опору, и направлена перпендикулярно поверхности опоры.
- Сила натяжения (нити, сцепки) Т: возникает в нити, приложена к телу, действие которого вызывает деформацию нити, и направлена вдоль нити в сторону, противоположную деформации.
Часто сталкиваюсь с тем, что дети не верят в то, что могут учиться и научиться, считают, что учиться очень трудно.
Потенциальная энергия упруго деформированного тела
Потенциальная энергия упруго деформированного тела — физическая величина, равная половине произведения жесткости тела на квадрат его деформации.

Потенциальная энергия упруго деформированного тела зависит от взаимного положения частей тела относительно друг друга, например витков пружины. Работа, которую может совершить растянутая пружина при перемещении ее конца, зависит только от начального и конечного растяжений пружины.
Найдем работу, которую может совершить растянутая пружина, возвращаясь к не растянутому состоянию, то есть найдем потенциальную энергию растянутой пружины.

Потенциальная энергия упруго деформированного тела равна работе, которую совершает сила упругости при переходе тела в состояние, в котором деформация равна нулю.
Из этой формулы видно, что, растягивая с одной и той же силой разные пружины, мы сообщим им различный запас потенциальной энергии: чем жестче пружина, то есть чем больше коэффициент упругости, тем меньше потенциальная энергия; и наоборот: чем мягче пружина, тем больше энергия, которую она запасет при данной силе, растянувшей ее. Это можно уяснить себе наглядно, если учесть, что при одинаковых действующих силах растяжение мягкой пружины больше, чем жесткой, а потому больше и произведение силы на путь точки приложения силы.

— потенциальная энергия тела

— коэффициент жесткости (или просто жесткость) пружины

— абсолютная деформация (удлинение или сжатие пружины)
Читайте также:
- Реферат правило прецедента значение и круг действия правила прецедента
- Значение и содержание одного из источников развития дошкольной педагогики реферат
- Место исполнительной власти в единой системе государственной власти реферат
- Понятие юридическое значение и виды правовых актов управления реферат
- Концепция дошкольного воспитания реферат