
Автоматические регуляторы их классификация и характеристики реферат
Обновлено: 02.07.2024
Если при непрерывном изменении входной величины регулирующий орган перемещается непрерывно, то такой регулятор называется регулятором непрерывного действия. Любой регулятор непрерывного действия работает в соответствии с установленным для него законом регулирования.
Под законом регулирования понимают вид математической зависимости между выходной (перемещение регулирующего органа и) и входной величинами регулятора (отклонение регулируемого параметра от заданного значения е = у - узад). Закон регулирования наглядно отображается временной характеристикой регулятора.
Несмотря на большое разнообразие объектов регулирования характерные их свойства, имеющие значение для целей управления, немногочисленны. Это объясняется общностью физических законов, которым подчиняются различные процессы, протекающие в объектах и системах регулирования.
Подобная универсальность присуща и законам регулирования для самых различных технологических объектов. Используя весьма небольшое число типовых законов регулирования, можно достаточно качественно управлять всеми промышленными объектами. Для каждого объекта достаточно подобрать лишь параметры настройки регулятора. Применение типовых законов регулирования позволяет использовать в промышленных САР стандартные, серийно выпускаемые регуляторы. Название регулятору обычно дают по типу закона регулирования, который он, как принято говорить, отрабатывает.
По динамическим свойствам, т. е. по закону регулирования, регуляторы непрерывного действия подразделяются:
■ на пропорциональные П-регуляторы (статические);
■ интегральные И-регуляторы (астатические);
■ пропорционально-интегральные ПИ-регуляторы (изодромные);
■ дифференциальные (Д) регуляторы:
Свойства регулятора с тем или иным законом регулирования проявляются, как и у объектов регулирования, в реакции на скачкообразное входное воздействие.
Сущность основных законов регулирования для лучшего усвоения изложена на примерах простейших регуляторов прямого действия, где регулируемым параметром является давление газа в газосборнике.
Пропорциональный регулятор (П-регулятор).
Автоматические регуляторы, у которых отклонение регулируемой величины от заданного значения вызывает перемещение регулирующего органа на величину, пропорциональную величине этого отклонения, называются пропорциональными, или статическими. Каждому значению регулируемого параметра соответствует одно определенное положение регулирующего органа. Эта пропорциональная зависимость достигается за счет действия жесткой обратной связи, поэтому П-регуляторы называются также регуляторами с жесткой обратной связью. Скорость перемещения регулирующего органа таких регуляторов пропорционально скорости изменения регулируемой величины. П-регуляторы, как и интегральные, могут быть прямого и непрямого действия.
П-регулятор работает согласно следующему уравнению:

где S1 — настроечный параметр, равный коэффициенту усиления регулятора: S1 = Кр.
Задачей регулятора (рис. 1, а) является стабилизация давления газа в сборнике изменением притока его Qп при изменяющейся нагрузке, т.е. изменяющемся расходе газа. Пусть давление равно заданному Рз при номинальной (расчетной) нагрузке Qр.ном, а САР находится в равновесии, т.е.Р = Рз при Qп = Qр.ном. Усилие, создаваемое давлением газа на мембрану регулятора, уравновешено усилием деформации пружины; затвор регулирующего органа находится в среднем положении.

Рисунок 1 - Пропорциональный регулятор:
а — схема регулятора; 6 — временная характеристика
Теперь предположим, что потребление газа внезапно (скачкообразно) увеличилось. Это приведет к снижению давления в сборнике и нарушению равновесия сил, действующих на мембрану. Под преобладающим усилием пружины мембрана, а с ней и затвор будут перемещаться вверх, увеличивая проходное сечение регулирующего органа до восстановления равновесия между притоком и новым значением расхода. Когда это состояние будет достигнуто, затвор займет новое положение выше начального. Сжатие пружины при этом уменьшится, и для уравновешивания ее усилия в новом состоянии потребуется меньшее давление газа.
Из этого следует очень важный вывод: П-регулятор восстановил равновесие в САР, т. е. выполнил главную задачу, но значение регулируемого параметра стало другим, не равным заданному. Разность между заданным и новым установившимся значением регулируемого параметра называется остаточным отклонением его или статической ошибкой Δст П-регулятора (рис. 1, б). Она увеличивается с увеличением нагрузки объекта. Обычно такая ошибка существенного значения не имеет, а в случае необходимости ее можно устранить, изменив задание регулятору. В данном случае надо дополнительно сжать пружину вращением по резьбе нижней опорной гайки.
Статическая характеристика П-регулятора согласно его уравнению есть прямая линия, т. е. каждому значению регулируемого параметра соответствует только одно определенное положение затвора регулирующего органа. Коэффициент усиления Кр характеризует чувствительность регулятора. Его можно изменять (настраивать) с учетом свойств объекта регулирования. В конструкции регулятора имеются специальные органы настройки. В ряде регуляторов настраивают не коэффициент усиления, а обратную ему величину, выраженную в процентах. Она называется зоной регулирования (ЗР):

На рис. 2 приведены статические характеристики регулятора, полученные при различных значениях Кр. Из них видно, что чем больше Кр, тем на большую часть своего рабочего хода переместится затвор регулирующего органа при одинаковом изменении регулируемого параметра, и наоборот. Чрезмерным увеличением чувствительности П-регулятор можно приблизить к позиционному, что отразится на качестве регулирования. Оптимальное значение КР находят в каждом конкретном случае. В рассматриваемом регуляторе давления его чувствительность зависит от жесткости пружины: чем она меньше, тем чувствительнее регулятор.
Динамические свойства П-регулятора видны из его временной характеристики (см. рис. 1, б): если ступенчатое изменение ε принять за 1, то изменение U будет численно равно Кр. Способность П-регулятора быстро восстанавливать равновесие в САР обеспечили ему широкое применение, например, в объектах без самовыравнивания.
Автоматическим регулятором называется устройство, обеспечивающее в системах автоматического регулирования (АСР) поддержание технологической величины объекта, характеризующей протекание в нем процесса около заданного значения путем воздействия на объект.
Заданное значение может иметь постоянную величину (в системах стабилизации) или изменяться по определенной программе (в системах программного регулирования).
Структурная схема регулятора может быть представлена как совокупность двух элементов (рис.1): элемента сравнения 1 и элемента 2, формирующего алгоритм (закон) регулирования.
На элемент сравнения 1 поступают два сигнала у и у зд , пропорциональные, соответственно, текущему и заданному значениям регулируемой величины. Сигнал у формируется измерительным преобразователем, а сигнал у зд – задатчиком или программным устройством.
поступает в элемент 2, который вырабатывает выходной сигнал регулятора, направляемый на исполнительное устройство.
Регуляторы могут быть с прямой и обратной характеристикой. Если с увеличением у относительно у зд выходная величина u увеличивается, то регулятор имеет прямую характеристику, а если уменьшается, то – обратную характеристику. Переход с прямой характеристики на обратную и наоборот в регуляторах осуществляют при помощи специального переключателя.
Отрицательную обратную связь в замкнутом контуре АСР формируют посредством применения регуляторов с прямой или обратной характеристикой.
Законом регулирования называется зависимость между изменением выходной величины регулятора u и рассогласованием текущего у и у зд значений регулируемой величины.
По законам регулирования аналоговые регуляторы делят на пропорциональные, пропорционально-интегральные, пропорционально-дифференциальные и пропорционально-интегрально-дифференциальные.
Закон регулирования пропорционального регулятора имеет вид
где - коэффициент передачи (усиления) регулятора; u 0 -выходная величина регулятора в начальный момент времени.
Коэффициент передачи регулятора является параметром настройки регулятора. Изменяя ,можно изменить степень воздействия регулятора на объект.
Структурная схема П-регулятора представляет звено с большим коэффициентом усиления (k =10000¸40000), охваченное по отрицательной обратной связи усилительным звеном с коэффициентом k oc .
Передаточная функция П-регулятора, приведённого на рис. 2, равна
Из выражения (3) видно, что чем меньше коэффициент k ос (степень воздействия отрицательной обратной связи), тем больше изменяется выходная величина регулятора при определенном рассогласовании.
Динамические характеристики П-регулятора при ступенчатом изменении входного сигнала и различных значениях k p приведены на рис. 3.
Согласно уравнению (2) выходной сигнал регулятора для зависимостей 1 и 2 будет равен:
К достоинствам пропорционального регулятора следует отнести его безынерционность (или быстродействие). Это выражается в том, что его выходная величина изменяется одновременно с изменением входной величины. Оптимальное значение параметра настройки регулятора, как и для других регуляторов определяется выбранным переходным процессом АСР, заданными параметрами качества регулирования и устанавливается в зависимости от свойств объекта регулирования.
Выходная величина пропорционально-интегральных регуляторов (ПИ-регуляторов) изменяется под действием суммы двух составляющих: пропорциональной и интегральной.
Закон регулирования ПИ-регуляторов с независимыми параметрами настройки описываются равенством:
где k p – коэффициент передачи регулятора;
Т и – время интегрирования.
По физическому смыслу Т и – это время, в течение которого изменение выходного сигнала регулятора под действием интегральной составляющей достигает ступенчатого изменения его входной величины.
ПИ-регулятор имеет два параметра настройки – k p и Т и .
Динамическая характеристика ПИ-регулятора (рис.4) представляет сумму пропорциональной и интегральной составляющих.
Из рисунка видно, что с увеличением Т u степень воздействия интегральной составляющей уменьшается.
Структурная схема ПИ-регулятора с независимыми параметрами настройки приведена на рис. 5.
Передаточная функция этого регулятора описывается уравнением
В промышленности широко используются также регуляторы с зависимыми параметрами настройки (изодромные регуляторы), уравнение динамики которых имеет вид:
где k p –коэффициент передачи регулятора;
Т из –время изодрома регулятора.
По физическому смыслу Т из – это время, в течение которого при ступенчатом изменении входной величины выходная величина регулятора под действием интегральной составляющей изменяется на такую же величину, как и под действием пропорциональной составляющей.
Динамические характеристики изодромного регулятора приведены на рис.6.
Структурная схема изодромного регулятора представлена на рис. 7.
Передаточная функция приведенной структурной схемы находится по равенству
Обозначая через k p , получим
ПИ-регуляторы по сравнению с П-регуляторами обладают меньшим быстродействием. Вместе с тем, вследствие отсутствия статической ошибки при работе в замкнутом контуре АСР,они обеспечивают более качественное регулирование. Это обуславливается тем, что интегральная составляющая регулятора будет действовать до тех пор, пока рассогласование не станет равным нулю.
К регуляторам с опережением ( с воздействием по производной) относят пропорционально-дифференциальные и пропорционально-интегрально-дифференциальные (ПД- и ПИД-) регуляторы.
Закон регулирования ПД-регулятора с независимыми параметрами настройки описывается уравнением
где – время дифференцирования.
Динамическая характеристика ПД-регулятора, описываемого уравнением (8), при подаче на его вход входного сигнала, изменяющегося с постоянной скоростью , представлена на рис. 8.
Уравнение ПД-регулятора с зависимыми параметрами настройки имеет вид
где Т п – время предварения.
По физическому смыслу Т п показывает, что по сравнению с пропорциональной составляющей выходной величины регулятора u п выходная величина u пд достигает тех же значений с опережением по времени, равном Т п . Это явствует из приведенной на рис. 9 динамической характеристики регулятора, описываемого уравнением динамики 9.
На рис. 10. приведена структурная схема ПД-регулятора с зависимыми параметрами настройки.
Передаточная функция ПД-регулятора с такой структурной схемой равна
Закон регулирования ПИД-регулятора с независимыми параметрами настройки имеет вид
Структурная схема ПИД-регулятора с зависимыми параметрами приведена на рис. 11.
Передаточная функция такого регулятора описывается уравнением
Характеризуя быстродействие ПИД-регулятора необходимо отметить, что если воздействия интегральной и дифференциальной составляющих одинаковы, то его быстродействие приближается к быстродействию П-регулятора. Если воздействие дифференциальной составляющей больше, чем воздействие интегральной составляющей, то регулятор будет действовать быстрее, чем П-регулятор. В случае же большего воздействие интегральной составляющей быстродействие ПИД-регулятора будет приближается к быстродействию ПИ-регулятора.
При работе в замкнутом контуре АСР введение дифференциальной составляющей в закон регулирования вызывает уменьшение скорости изменения регулируемой величины, уменьшение времени регулирования и динамической ошибки регулирования, а также интегральной ошибки регулирования.
Уравнения динамики, настроечные параметры, переходные характеристики и их графики для различных типов регуляторов приведены в табл. 1.
При автоматизации химико-технологических производств используются регуляторы и контроллеры .
Регуляторы представляют собой технические средства с жесткой функциональной структурой, обеспечивающей реализацию закона регулирования.
Контроллеры – специализированные вычислительные устройства, обеспечивающие выполнение закона регулирования программно. При изменении программы алгоблок контроллера реализует выбранный алгоритм регулирования.
Регуляторы могут быть пневматическими или электрическими, а контроллеры – электрическими.
Предел пропорциональности показывает, в каком диапазоне изменяется входной сигнал регулятора при изменении его выходного сигнала от 0 до 100%. Он характеризует степень отрицательной обратной связи в пропорциональном регуляторе. Чем меньше, тем силнее воздействие регулятора на объект.
В электрических регуляторах и контроллерах используются следующие диапазоны изменения сигналов: 0–5 мА; 0–20 мА; 4–20 мА и 0–10 В.
Электрические регуляторы и алгоритмы регулирования регулирующих микропроцессорных контроллеров описываются законами с зависимыми параметрами настройки.
Наличие определенного диапазона выходного сигнала регулятора обуславливает его ограничение по величине. Поэтому в случае значительного рассогласования или при установке определенных значений настроечных параметров выходной сигнал регулятора будет принимать предельные значения.
3.1. Регулирующие устройства и автоматические регуляторы.
3.2. Исполнительные механизмы.
3.3. Интерфейсные устройства.
Регулирующие устройства, и автоматические регуляторы, исполнительные механизмы, интерфейсные устройства
Регулирующие устройства и автоматические регуляторы.
В стандарте DIN 19226 дается следующее определение понятия "регулирующее устройство" и "регулятор":
Регулирующее устройство – это приборы, которые необходимы непосредственно для воздействия на объект регулирования в соответствии с поставленной задачей. В состав регулирующего устройства входят как минимум одно устройство для регистрации регулируемой величины x и для сравнения с задающей величиной w, а также одно устройство для формирования регулирующей величины y.
Регулятор – это прибор, который в рамках регулирующего устройства объединяет в себе выполнение нескольких функций, присущих регулирующему устройству. Однако для регулятора обязательно наличие сравнивающего устройства, а также как минимум еще одного важного функционального элемента, например усилителя или схемы задержки.
Автоматический регулятор - это устройство (совокупность устройств), посредством которого осуществляется процесс автоматического регулирования. Функционирование автоматического регулятора происходит в соответствии с алгоритмом регулирования, под которым понимают математическое выражение функциональной зависимости выходной величины регулятора от входной. Основная задача регуляторов заключается в формировании такого управляющего воздействия на объект регулирования в зависимости от измеренных отклонений регулируемой величины, чтобы восстановить требуемое состояние объекта. Автоматические регуляторы классифицируются по различным признакам (рис.3.1).
В зависимости от возможности изменять свой режим работы регуляторы подразделяются на два класса:
- детерминированные регуляторы не изменяют своих параметров в процессе регулирования;
- регуляторы с настройкой - экстремальные и адаптивные. Экстремальные - непрерывно производят поиск оптимальных значений выходных величин объекта. В адаптивных регуляторах происходит настройка параметров с целью достижения оптимального качества регулирования при изменении характеристик объекта во время его работы.
По наличию дополнительных источников энергии различают регуляторы:
- Регуляторы прямого действия управляют регулирующим органом за счет энергии, получаемой от регулируемой среды, и не требуют вспомогательной энергии.
- Регуляторы непрямого действия. В них имеются усилители мощности, управляющие поступлением энергии от постороннего источника. При этом в зависимости от вида используемой энергии различают электрические, пневматические, гидравлические и комбинированные регуляторы.
В зависимости от характера воздействия на объект имеются:
- регуляторы непрерывного действия - обеспечивают непрерывное изменение регулирующего воздействия. Во многих случаях к ним относят и регуляторы с импульсным перемещением регулирующего органа.
- регуляторы дискретного действия - изменяют регулирующее воздействие только в определенные моменты времени, в интервале между которыми регулирующее воздействие постоянно.
В зависимости от вида квантования входного сигнала подразделяются на:
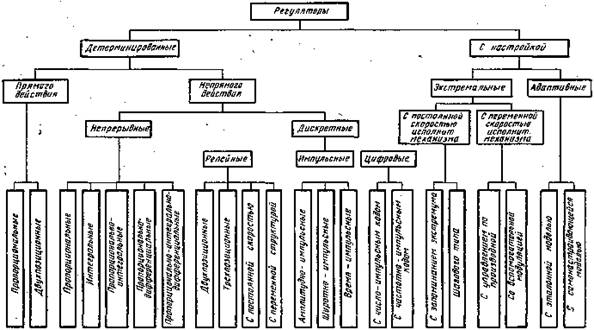
Рис.3.1. Классификация автоматических регуляторов дискретного действия
В соответствии с реализуемым законом регулирования регуляторы делятся на:
- релейные двух- и трехпозиционные и релейные с механизмами постоянной скорости.
По способности изменять свою структуру различают регуляторы:
- с фиксированной структурой - не изменяют свою структуру при изменении характеристик объектов регулирования;
- с переменной структурой – у них структура изменяется при изменении свойств объекта.
По характеру математической связи между выходной и входной координатами регуляторы подразделяются на:
В зависимости от конструктивного исполнения имеются регуляторы:
- приборного типа - в системе регулирования включается последовательно со вторичным прибором, в котором формируется сигнал ошибки;
- аппаратного типа - сами формируют сигнал ошибки и обычно включаются параллельно вторичному прибору;
- агрегатного типа – в них используется агрегатный принцип построения используется при стандартных сигналах на выходе датчиков. Такой принцип рекомендован ГСП и позволяет подключать любой стандартизованный датчик непосредственно к унифицированному входу регулятора.
В соответствии с числом регулируемых величин регуляторы подразделяются на:
Регуляторы классифицируются также по классу систем и фирмам-изготовителям.
Линейные регуляторы – это регуляторы, которые позволяют реализовать теоретические (стандартные) законы регулирования, называются идеальными. В этих регуляторах операции интегрирования, дифференцирования, суммирования и умножения на постоянный коэффициент выполняются абсолютно точно. Рассмотрим динамические характеристики регуляторов с различными стандартными законами регулирования.
Пропорциональные (П) регуляторы.
Закон регулирования П-регулятора выражается уравнением:
где kp - коэффициент пропорциональности, являющийся параметром настройки П-регулятора.
У пропорциональных регуляторов отклонение регулируемой величины X от ее заданного значения Х0 вызывает перемещение регулирующего органа на величину, пропорциональную этому отклонению x = Х0 - X.
Передаточная функция П-регулятора имеет вид:
Переходная характеристика П-регулятора показана на рис.3.2, а.
Величину, обратную коэффициенту пропорциональности регулятора, т.е. δр = 1/kр, называют статизмом, или коэффициентом неравномерности регулятора, а величину (1/kp) 100%-диапазоном дросселирования.
Рис.3.2. Переходные характеристики линейных идеальных регуляторов
Особенностью систем регулирования с П-регулятором является изменение регулируемой величины при различных нагрузках регулируемого объекта. Объясняется это тем, что перемещение регулирующего органа в новое положение, соответствующее новой нагрузке, может быть произведено только за счет отклонения регулируемой величины. Разность между максимальным и минимальным установившимися значениями регулируемой величины хшах называют остаточной неравномерностью П-регулятора, ее величина определяется выражением хшах = 1/kp.
Интегральные (И) регуляторы.
Процесс регулирования И-регулятором происходит по закону, который описывается уравнением:
где Ти - постоянная времени интегрирования, являющаяся параметром настройки И-регулятора.
Интегральные регуляторы производят перемещение регулирующего органа пропорционально интегралу отклонения регулируемой величины до тех пор, пока не восстановится ее заданное значение.
Передаточная функция И-регулятора имеет вид:
Переходная характеристика И-регулятора показана на рис.3.2, б. Интегральный регулятор не обладает остаточной неравномерностью, что является его положительной особенностью.
Пропорционально-интегральные (ПИ) регуляторы.
Закон регулирования ПИ-регулятора выражается уравнением:
где Ти — время интегрирования регулятора, или время изодрома. Коэффициент пропорциональности kp и постоянная времени Ти являются параметрами настройки ПИ-регулятора.
Уравнение закона регулирования ПИ-регулятора состоит из двух составляющих регулирующего воздействия: kpx - пропорциональной и - интегральной. Передаточная функция ПИ-регулятора имеет вид:
В динамическом отношении ПИ-регулятор представляет собой систему из двух параллельно включенных регуляторов: пропорционального и интегрального. При увеличении времени изодрома до бесконечности ПИ-регулятор превращается в П-регулятор. Если kp и Ти стремятся к нулю, но их отношение остается постоянным, то получим И-регулятор. Пропорционально-интегральные, как и интегральные, регуляторы не обладают остаточной неравномерностью. Переходная характеристика ПИ-регулятора показана на рис.3.2, в.
Пропорционально-дифференциальные(ПД) регулятор.
Закон регулирования ПД-регулятора выражается следующим уравнением:
где Тд - время дифференцирования, или время предварения регулятора, характеризующее степень влияния воздействия по производной на величину регулирующего воздействия. Коэффициент пропорциональности kp и постоянная времени Тд ПД-регулятора являются параметрами его настройки.
Передаточная функция ПД-регулятора:
Пропорционально-дифференциальный, как и пропорциональный, регулятор обладает остаточной неравномераостью, величина которой определяется выражением хшах = 1/kр.
Однако дополнительное воздействие по скорости отклонения регулируемой величины от заданного значения положительно влияет на процесс регулирования. Это является преимуществом ПД-регуляторов по сравнению с П-регуляторами. Переходная характеристика ПД-регулятора показана на рис.3.2, г.
Пропорционально-интегрально-дифференциальные (ПИД) регуляторы.
Закон регулирования ПИД-регулятор а определяется уравнением:
Параметрами настройки ПИД-регулятор а служат коэффициент пропорциональности kр и постоянные времени Тя и Тя.
Передаточная функция имеет вид:
В динамическом отношении эти регуляторы представляют собой систему из трех параллельно включенных звеньев: безынерционного, интегрирующего и идеального дифференцирующего. При ТД = 0 ПИД-регулятор превращается в ПИ-регулятор. ПИД-регуляторы не обладают остаточной неравномерностью. Переходная характеристика ПИД-регулятора показана на рис.3.2, д
Промышленные регуляторы состоят из реальных элементов, поэтому их динамические характеристики отличаются от динамических характеристик, определяемых уравнениями идеальных регуляторов.
Для оценки расхождения характеристик идеального и реального регуляторов передаточную функцию Wp(p) реального регулятора представляют в виде произведения передаточной функции Wид(р) идеального регулятора и передаточной функции Wб(p) некоторого балластного звена:
Если регулятор идеальный, то передаточная функция балластного звена W6(ρ) ≡ 1, его модуль W6(ω) ≡ 1, а фаза φ6(ω) ≡ 0. Чем больше передаточная функция балластного звена отличается от единицы, тем значительнее отличается качество регулирования в системах с идеальными и реальными регуляторами. Степень отличия реального регулятора от идеального для одного и того же типа прибора может быть различной, так как она зависит не только от структурной схемы и конструкции, но и от динамических настроек регулятора. Для регуляторов с нелинейными элементами частотные характеристики балластного звена зависят также от амплитуды входного сигнала.
Область в пространстве амплитуд, частот входного сигнала и параметров настройки регулятора, в пределах которой частотные характеристики идеального и реального регуляторов отличаются на величину, не превышающую некоторое наперед установленное значение, называют областью нормальной работы (ОНР) регулятора.
Частотные характеристики идеального и реального регуляторов согласно установленным нормам могут отличаться по модулю на ±10% и по фазе на ±15%. В пределах этих отклонений различием в динамических характеристиках можно пренебречь, а в расчетах использовать уравнения идеальных регуляторов.
Сопоставление по величине ОНР является удобным и наглядным методом оценки регуляторов, отрабатывающих одинаковый закон регулирования. Обычно оно проводится при одних и тех же заранее выбранных значениях, амплитуды и частоты входного сигнала в координатах параметров настройки регуляторов.
При оценке регулятора обычно исходят из того, что егоприменение целесообразно, если оптимальные значения параметров настройки, лежащие внутри ОНР, соответствуют динамическим характеристикам объектов управления. Из двух однотипных регуляторов, имеющий большую ОНР лучше, так как он в большей мере удовлетворяет требованиям универсальности, поскольку может быть использован на более широком классе объектов.
Если в результате расчета параметров настроек регулятора будут получены данные, не попадающие в ОНР, то нужно выбрать либо другой закон регулирования, либо применить регулятор другого типа, имеющий более широкую область допустимых настроек.
Автоматические регуляторы, формирующие один и тот же закон регулирования, могут быть построены по различным структурным схемам. Каждая из таких структурных схем обладает рядом достоинств и недостатков, которые необходимо учитывать при разработке регуляторов и при их эксплуатации. Анализ структурных схем позволяет не только оценить, насколько характеристики реального регулятора отличаются от характеристик идеального, но и установить причины этих отклонений. Рассмотрим некоторые структурные схемы.
1. П-регуляторы. Типичная структурная схема пропорционального регулятора (рис.3.3, а) состоит из усилительного и интегрирующего звеньев, охваченных жесткой отрицательной обратной связью. Интегрирующим звеном является исполнительный механизм, который служит для преобразования выходного сигнала регулирующего блока в механическое перемещение.
Если усилитель k1 считать безынерционным с конечным значением коэффициента усиления, а исполнительный механизм - идеальным интегрирующим звеном, то передаточная функция регулятора запишется в виде:
Рис.3.3. Структурная схема и переходные характеристики реального линейного П-регулятора
где ТИM - постоянная времени исполнительного механизма. Обозначим Тб = ТИM/δpk1 тогда передаточная функция балластного звена:
Таким образом, реальный регулятор, для которого справедливы названные допущения, можно представить в виде последовательного соединения идеального П-регулятора с коэффициентом усиления kp и балластного звена с передаточной функцией W6(p).
Балластное звено в этом случае будет представлять собой апериодическое звено первого порядка с постоянной времени Тб, величина которой растет с увеличением постоянной времени исполнительного механизма Тим и коэффициента пропорциональности регулятора kр.
Наличие балластного звена в П-регуляторе объясняется конечным значением коэффициента усиления k1. Действительно, если k1 → ∞, то Тб → 0, a Wp(p) = kp = WП(p), т.е. рассматриваемый регулятор становится идеальным. На рис. 88, б приведены переходные характеристики П-регулятора с балластным звеном при различных значениях Тб.
2. ПИ-регуляторы. Имеется несколько разновидностей схем ПИ-регуляторов. Наиболее часто используемая схема изображена на рис.3.4, а. Она представляет собой последовательное соединение усилительного и интегрирующего звеньев, причем первое охвачено отрицательной обратной связью с апериодическим звеном. По такой структурной схеме выполнены регуляторы электронной агрегатной унифицированной системы. Передаточная функция такого регулятора имеет следующий вид:
С учетом этих обозначений получим передаточную функцию балластного звена в виде:
В этом случае балластное звено представляет собой апериодическое звено с коэффициентом усиления k6 и постоянной времени.
Рис.3.4. Структурная схема и переходные характеристики реального линейного ПИ-регулятора.
Для данной структурной схемы коэффициент усиления регулятора зависит от постоянной времени ТИМ интегрирующего звена, т.е. от времени полного хода исполнительного механизма. Известно, что постоянная времени исполнительного механизма в свою очередь зависит от нагрузки, поэтому от нагрузки зависит и kp. В таких регуляторах наблюдается взаимосвязь обоих настроечных параметров - коэффициента усиления kp и времени интегрирования Ти.
Переходные характеристики регулятора со структурной схемой, изображенной на рис. 3.4, а, приведены на рис.3.4, б.
Видно, что при s=0 регулятор становится идеальным. Чем больше значение s, тем сильнее отклонение характеристики реального регулятора от характеристики идеального.
3. ПИД-регуляторы. Эти регуляторы также могут быть построены по различным структурным схемам. Одна из типичных структурных схем изображена на рис.3.5, а. Она позволяет строить ПИД-регуляторы из унифицированных блоков. Для формирования, пропорционально-интегральной составляющей сигнала регулирования используется блок, схема которого показана на рис.3.5, а. Дифференцирующий блок 1 конструктивно может выполняться отдельно от других блоков.
Рис.3.5. Структурная схема и переходные характеристики реального линейного ПИД-регулятора
Передаточная функция регулятора с такой структурной схемой может быть записана в виде:
В этом случае передаточная функция балластного звена имеет вид:
Это - передаточная функция апериодического звена второго порядка. Максимальное отношение ТД/ТИ = 0,25. Оно достигается при а = 2 или (T2/T1) (k2 + 1) = 1. Это обстоятельство может рассматриваться как недостаток подобных схем, поскольку ограничивает область применения ПИД-регуляторов. Переходные характеристики регуляторов приведены на рис.3.5, б. При регулятор становится идеальным.
Введение.
Основные понятия.
Описание схемы автоматического регулирования.
Список используемой литературы.
Дианов В.Г. Автоматическое регулирование и регуляторы в химической промышленности
- формат djvu
- размер 4.27 МБ
- добавлен 25 апреля 2011 г.
Главы: Системы автоматического регулирования. Характеристики систем автоматического регулирования и их элементов. Объекты регулирования и их свойства. Автоматические регуляторы и их характеристики. Пневматичесие регуляторы. Гидравлические регуляторы. Электрические регуляторы. Устойчивость САР и качество автоматического регулирования. Связанное регулирование, понятие об оптимизации. Пневматические средства системы Центр. Для инженеров химической и.
Каминский М.Л. Монтаж приборов контроля и аппаратуры автоматического регулирования и управления
- формат djvu
- размер 4.14 МБ
- добавлен 25 апреля 2009 г.
1978г. 311с. В книге приведены краткие сведения о классификации приборов контроля и аппаратуры автоматического регулирования и управления, принципе действия и устройстве приборов для Измерения температуры, давления, разрежения, расхода, количества, концентрации растворов, уровня, а также приборов для контроля состава, влажности и плотности газов. Рассмотрено устройство пневматических, гидравлических и электрических регуляторов и аппаратуры дистан.
Каминский М.Л., Каминский В.М. Монтаж приборов и систем автоматизации
- формат djvu
- размер 8.97 МБ
- добавлен 04 февраля 2010 г.
Учебник для СПТУ. 5-е изд., перераб. и доп. - М.: Высшая школа, 1983. -248 с., ил. В книге приведены краткие сведения о классификации приборов контроля и аппаратуры автоматического регулирования и дистанционного управления технологическими процессами в различных отраслях промышленности и на отдельных объектах гражданского назначения. Рассмотрен принцип действия приборов для измерения температуры, давления, разрежения, расхода, количества, уровня.
Кузнецов Е.В. Комплект из 7 компьютерных лабораторных стендов: электрические регуляторы со следящими системами
- формат doc, exe
- размер 8.82 МБ
- добавлен 03 апреля 2011 г.
Комплект содержит 7 программ лабораторных стендов систем автоматического регулирования: давления пара в котле, уровня воды в котле, температуры топлива за паровым подогревателем, частоты вращения турбонасоса, температуры воды в системе охлаждения дизеля, температуры масла в системе смазки дизеля, теоретического объекта регулирования (11 видов передаточных функций). Регуляторы имеют последовательное корректирующее устройство с типовыми законами ре.
Кузнецов Е.В. Следящие системы электрических регуляторов
- формат doc
- размер 1.25 МБ
- добавлен 31 октября 2010 г.
Учебное пособие. 2010. 168с Системы автоматического регулирования со следящей системой. Принципы управления электрическим ИМ с асинхронным электродвигателем. Тиристорный усилитель. Датчик положения исполнительного механизма. Следящие системы с переменной скоростью перемещения ИМ. Бесконтактные электродвигатели постоянного тока (БДПТ). Датчики положения ротора БДПТ (энкодеры, резольверы). Управление бесконтактными электродвигателями постоянного т.
Кузнецов Е.В. Электрические системы автоматизации судового энергетического оборудования
- формат doc
- размер 1.23 МБ
- добавлен 29 октября 2010 г.
Принципы регулирования. Регулирование по отклонению. Регулирование по возмущению. Комбинированное регулирование. Типовые системы автоматического регулирования. Система с параллельным корректирующим устройством. Система с последовательным корректирующим устройством. Комбинированная система. Каскадные системы. Законы регулирования. Обзор законов регулирования. Формирование законов регулирования в последовательных. корректирующих устройствах. Вычисл.
Курсовая работа - Техническое обеспечение системы автоматического регулирования состава отходящих газов в дымовой трубе
- формат doc
- размер 1.35 МБ
- добавлен 21 июля 2011 г.
Курсовой проект - Проектирование систем автоматизации. Разработка АСР соотношения топливо?воздух
- формат doc, dwg, pdf
- размер 641.4 КБ
- добавлен 18 ноября 2009 г.
Донбасский Государственный Технологический Университет. Автоматизация производственных и технолокических процессов топливно-энергетического комплекса. Пояснительная записка содержит 38 с. , 4 рис. , 4 источника, 5 приложений; графическая часть – 4 листа формата А2. Объектом разработки является система автоматического контроля и управления нагревательного колодца. Цель работы – разработка проектной документации для создания автоматической системы.
Мухин В.С., Саков И.А. Приборы контроля и средства автоматики тепловых процессов
- формат djvu
- размер 2.63 МБ
- добавлен 22 марта 2009 г.
Учеб. пособие для СПТУ. — М.: Высш. шк. , 1988. —256 с: ил. В книге приведено описание приборов контроля и средств автоматического регулирования теплоэнергетических процессов, в том числе автоматических регуляторов, исполнительных механизмов и регулирующих органов, рассмотрены особенности их эксплуатации в промышленных условиях, изложены способы измерения, контроля и др. Книга будет полезна инженерно техническому персоналу и студентам обучающимс.
Савичев С.С. Автоматика и автоматизация производственных процессов в кинематографии.
- формат djvu
- размер 1.89 МБ
- добавлен 29 сентября 2009 г.
М. 1990 – 271 с. Краткое изложение основ теории регулирования. Сведения об элементах автоматики, характеристиках систем регулирования. Основные принципы построения систем автоматического регулирования в кинематографии, их классификация. Вопросы автоматизации процессов на этапах съемки, печати, обработки и демонстрирования фильмов.
2 Автоматическое регулирование возбуждения (АРВ) АРВ- это устройства, позволяющие изменять по заданным условиям тока возбуждение электрических машин. Осуществляется на синхронных генераторах, мощных синхронных двигателях, синхронных компенсаторах, на генераторах и двигателях постоянного тока и на других специальных электрических машинах изменением напряжения на обмотке возбуждения. При этом изменяется сила тока возбуждения электрической машины и, как следствие, основной магнитный поток и эдс в обмотках якоря. АРВ синхронных генераторов осуществляется в основном с целью обеспечения заданного напряжения в электрической сети, а также для повышения устойчивости их параллельной работы на общую сеть. АРВ широко применяется в электроприводе постоянного тока для поддержания постоянства частоты вращения рабочего органа машины путём воздействия на ток возбуждения двигателя или питающего генератора. Форсировка возбуждения генераторов облегчает и ускоряет процесс восстановления напряжения на шинах после отключения КЗ, что способствует также быстрому самозапуску электродвигателей. Все автоматические регуляторы возбуждения (АРВ), применяемые на синхронных генераторах, различаются по параметру, на который они реагируют, по способу воздействия на систему возбуждения генератора и подразделяются на три основные группы. К первой группе относятся электромеханические АРВ. Эти АРВ реагируют на отклонение напряжения генератора от заданного значения (уставки) и воздействуют на изменение сопротивления в цепи обмотки возбуждения возбудителя. К таким АРВ относятся ранее широко применявшиеся регуляторы напряжения реостатного и вибрационного типов. Ко второй группе относятся электрические АРВ. Эти АРВ реагируют на отклонение напряжения или тока генератора от заданного значения и подают дополнительный выпрямленный ток в обмотку возбуждения возбудителя от внешних источников питания (трансформаторов тока, напряжения или собственных нужд). 2
5 генератора, благодаря чему напряжение на зажимах статора генератора восстанавливается. Устройство компаундирования успешно работает и в аварийных режимах работы генератора, когда напряжение генератора снижается, а ток в обмотке статора значительно возрастает. В схему компаундирования входят трансформаторы тока ТТ, вторичная обмотка которых включена на промежуточный трансформатор УТП, а также выпрямитель В1, который выпрямляет ток компаундирования перед подачей его в обмотку возбуждения возбудителя ОВВ. Ток компаундирования I к без учета коррекции пропорционален I г. Компаундирование в чистом виде не может обеспечить достаточно точное поддержание напряжения генератора. Поэтому одновременно с регулированием возбуждения по току статора генератора применяется ещё регулирование по напряжению статора. Для введения регулирующего импульса по напряжению трансформатор УТП(универсальный трансформатор с подмагничиванием) оснащается еще двумя обмотками 2 и 4(рис. 4.10, а). Ток в обмотке 2пропорционален U r. Фаза тока I н подобрана так, что ток I н совпадает по фазе с реактивной слагающей тока генератора. Поэтому при чисто активной нагрузке МДС обмоток 1и 2взаимно сдвинуты на 90, а при чисто реактивной нагрузке генератора они совпадают по фазе. Вследствие этого ток компаундирования при неизменных величинах I г и U t получается тем больше, чем ниже cos φ или выше реактивная нагрузка генератора, это так называемое фазовое компаундирование, которое обеспечивает более точное поддержание напряжения, так как ток компаундирования зависит не только от абсолютного значения тока генератора, но и от cos φ. Через обмотку подмагничивания 4 УТП производится окончательная коррекция тока компаундирования относительно заданного значения U r при помощи корректора напряжения. В общем случае в состав корректора напряжения входят два измерительных элемента И1 и И2, включаемых в цепь трансформатора напряжения ТН через установочный автотрансформатор УAT. 5
6 Рис Структурная схема АРВ сильного действия Принцип действия измерительного органа корректора поясняется рис. 4.10, б. Выпрямленный ток I 1 на выходе измерительного элемента И1прямо пропорционален входному напряжению. Поэтому этот элемент называется линейным. Выпрямленный ток I 2 на выходе элемента И2, который называется нелинейным, имеет нелинейную зависимость от входного напряжения (рис. 4.10, б). Оба тока I 1 и I 2 поступают в усилитель У, который реагирует на их разность и усиливает ее. Ток выхода корректора поступает в данном случае в обмотку 4подмагничивания УТП. Из рис. 4.10, б видно, что при снижении напряжения на входе измерительных элементов менее U 1, под действием разности токов (I 1 I 2 ) ток выхода корректора увеличивается. Корректор поддерживает то напряжение генератора, которое соответствует напряжению U 1 на входе измерительных элементов. С помощью автотрансформатора УATможно изменять настройку корректора. Рассмотренная схема АРВ относится к группе регуляторов пропорционального действия, реагирующих на отклонение тока статора и напряжения статора генератора. Разработаны и находятся в эксплуатации регуляторы сильного действия, реагирующие на скорость изменения параметров регулирования или даже на их 6
7 ускорение. Устройство АРВ сильного действия в сочетании с быстродействующими системами возбуждения, имеющими высокие скорости изменения напряжения возбуждения и большие значения потолочного напряжения возбудителя, обеспечивает значительное повышение устойчивости параллельной работы генератора. При этом регулятор будет по-настоящему эффективен, если изменение возбуждения будет производиться не только с учётом изменения напряжения генератора, но и частоты в энергосистеме. Структурная схема АРВ сильного действия приведена на рис Автоматическое регулирование возбуждения состоит из двух основных звеньев: измерительного звена и усилителя-сумматора. В измерительное звено входят: блок измерения напряжения (БИН) и блок измерения частоты (БИЧ). Блок БИН содержит предвключённый элемент блок коррекции тока (БКТ), в котором происходит автоматическая коррекция измеряемого напряжения в зависимости от реактивной составляющей тока генератора. После БКТ сигнал поступает на измерительные элементы (отклонение напряжения) и U' (производная напряжения), выход которых пропорционален указанным величинам. Блок БИЧ имеет измерительные элементы, выход которых пропорционален и f'. Усилитель-сумматор представляет собой двухкаскадный магнитный усилитель, выходной сигнал которого направляется на управление рабочей и форсировочной группами тиристоров быстродействующей системы возбуждения (исполнительный элемент). Для улучшения характеристик АРВ (повышения быстродействия и др.) в схему регулятора обычно вводят обратные связи (ОС). Пункт автоматического регулирования напряжения (ПАРН) Устройство ПАРН рекомендуется применять в условиях сложной эксплуатации высоковольтных электрических линий 6 10 кв трехфазной сети умеренного и сурового климата в котором господствуют: сильный ветер и гололед с интенсивным оледенением проводов, а также при высокой снеговой нагрузке до 250 кгс/м 2. Высокая протяженность воздушных линий электропередач, отражающаяся на качественных показателях электрической энергии и интенсивное присоединение новых 7
9 Блок автоматического регулирования напряжения (БАРН) Устройство используется для регулировки высоковольтного напряжения 6 10 кв в трехфазных электрических сетях с любым видом заземляющей нейтрали и может применяться для любых типов распределительных устройств подстанций, в том числе для установки в местах критического падения напряжения. БАРН способствует повышению пропускной способности как новых, так и уже существующих воздушных линий. Наличие такого оборудования благоприятно сказывается на передаче электроэнергии на большие расстояния и устраняет асимметрию напряжения в электросетях. Рис 2. Вольтодобавочный автрансформатор используемый в комплектации БАРН, оборудованный 32-ступенчатой регулировкой напряжения Принцип работы БАРН происходит за счет геометрического сложения напряжений обмоток. Изменение параметров напряжения происходит при изменении полярности последовательной обмотки, при повышении напряжения полярность меняется, при понижении полярность последовательной и основной обмоток совпадает. Регулировка осуществляется электроникой в шкафу управления, которая подает команду электроприводу, перемещающему переключатель в заданное положение. 9
10 Рис 3. Электрическая схема БАРН Список литературы: 1. Беркович М.А. и др. Автоматика энергосистем: Учеб. для техникумов/ М.А. Беркович, В.А. Гладышев, В.А. Семенов. 3-е изд., перераб. и доп. - М.: Энергоатомиздат, с
Читайте также: