
Пусковые свойства асинхронного двигателя кратко
Обновлено: 05.07.2024
Трехфазный асинхронный двигатель: все самое главное, что нужно знать
В электротехнике асинхронный двигатель является вращающейся электрической машиной для переменного тока.
Асинхронный двигатель использует вращающееся магнитное поле, генерируемое в статоре, для создания крутящего момента, чтобы вызвать электрический ток в роторе (передача энергии за счет электромагнитной индукции), и поэтому он должен иметь скорость немного ниже (выше для асинхронного генератора), чем скорость вращающегося магнитного поля (так называемое скольжение).
Большая разница по сравнению с двигателями постоянного тока и синхронными двигателями заключается в том, что на ротор не подается ток, а переменный ток проходит только через обмотку статора.
Трехфазный асинхронный двигатель - самый распространенный электродвигатель в мире, потому что он простой, экономичный, не требует обслуживания, вращается без дополнительных вспомогательных средств (в варианте с короткозамкнутым ротором во время его работы не возникает искр, поэтому он подходит для взрывоопасных сред, таких как шахты, газовые приборы и т. д.).

Однофазные варианты используются для более низких мощностей. Хотя они традиционно используются для работы на постоянной скорости, в настоящее время они используются с частотными преобразователями на разных скоростях (обычно для экономии электроэнергии).
Благодаря простой конструкции, прочности и возможности неискрящей конструкции, этот тип двигателя является наиболее распространенным на практике, он используется во многих областях промышленности, транспорта и домашнего хозяйства. Мощность асинхронных двигателей колеблется от нескольких ватт до многих сотен киловатт.
Два наиболее распространенных типа асинхронных двигателей: с короткозамкнутым ротором и с фазным ротором.
Первые асинхронные двигатели были построены независимо несколькими изобретателями:
В 1887 году Никола Тесла подал патент на асинхронную машину, 5 мая следующего года - еще пять патентов.
В то же время Галилео Феррарис опубликовал трактат о вращающихся машинах.
В 1889 году Михаил Осипович Доливо-Добровольский изобрел первый трехфазный асинхронный двигатель с короткозамкнутым ротором

Асинхронный двигатель General Electric, 25 лошадиных сил, 60 гц, 220 вольт, 70 ампер, 1911 год
Устройство
Каждый трехфазный асинхронный двигатель состоит из двух основных частей.
Статор (неподвижная часть) - аналогичен для большинства типов. Он состоит из опорной рамы двигателя, подшипниковых щитов, фланца, ножек, набора пластин статора с вставленной в пазы обмотки статора.
Ротор (вращающаяся часть) - вал с запрессованными роторными (электротехническими) листами с пазами, в которые вставляются стержни обоймы ротора или проводники обмотки ротора. В пазы ротора вставляются голые медные, латунные или алюминиевые стержни, которые с обоих концов соединены короткозамыкающим кольцом.
Кольцевой якорь в двигателе с фазным ротором - в пазы листов помещается обмотка ротора из изолированных проводов, которая соединяется звездой или треугольником. Обмотка ротора соединена с тремя кольцами. На кольца опираются три кольца угольных щеток, к которым может быть подключена цепь регулирующего ротора, чаще всего резисторы.

Конструкция трехфазного асинхронного двигателя

Обмотки статора трехфазного асинхронного двигателя
Принцип работы
В основе работы асинхронной машины лежит создание вращающегося магнитного поля статора, которое создается за счет прохождения переменного трехфазного тока через обмотку статора.
Это магнитное поле индуцирует напряжение в обмотке ротора, а ток, генерируемый обмоткой ротора, индуцирует магнитный поток, который передается на статор. Связанный магнитный поток вызывает силу, действующую на ротор, и, следовательно, вращение ротора.
Скорость вращающегося поля статора, то есть синхронная скорость, определяется частотой напряжения питания и числом полюсов двигателя:

f - это текущая частота и p - количество пар полюсов (т.е. p : 1 = двухполюсный, 2 = четырехполюсный, 3 = шестиполюсный, 4 = восьмиполюсный и т. д.).
Скольжение
Асинхронная машина может прикладывать крутящий момент к выходному валу только в том случае, если скорость вращения магнитного поля статора отличается от механической скорости ротора из-за так называемого скольжения.
При ненулевом скольжении магнитный поток статора, связанный с потоком ротора, движется относительно ротора, переменный (переменный) связанный магнитный поток статора и ротора протекает через ротор, в обмотке ротора индуцируется напряжение, ток ротора потоков, роторная часть связанного магнитного потока машины отлична от нуля и крутящего момента.
Частота обмотки статора определяется частотой сети. Частота магнитного потока ротора и обмотки ротора отлична от нуля, определяется скольжением и отличается от частоты обмотки статора. Скольжение указывается в процентах и определяется как:

Номинальная скорость двигателя - это скорость, включая номинальное скольжение двигателя (оба значения указаны на паспортной табличке двигателя).
При нулевом скольжении, то есть при синхронной скорости машины, связанный магнитный поток статора и ротора не перемещается относительно ротора. Напряжение в обмотке ротора не индуцируется, ток ротора не течет, и крутящий момент не создается.
Крутящий момент
Крутящий момент обычного асинхронного двигателя с короткозамкнутым ротром задается в установившемся состоянии так называемым соотношением Клосса. Устойчивое состояние возникает после исчезновения переходных процессов, вызванных быстрыми изменениями нагрузки или источника питания машины.

Где, М max - максимальный крутящий момент (не путать с номинальным) и S z - скольжение при максимальном крутящем моменте .
Максимальный крутящий момент асинхронной машины пропорционален квадрату напряжения питания.
Пуск
При пуске асинхронного двигателя с короткозамкнутым ротором пусковой ток до 7 раз превышает значение номинального тока. Это создает большие скачки тока в сети при относительно небольшом крутящем моменте включения, поэтому прямой пуск обычно применяется только для двигателей мощностью около 3 кВт.
Уменьшение большого пускового тока асинхронного двигателя может быть достигнуто за счет уменьшения пускового напряжения статора.
Полупроводниковый регулятор напряжения (устройство плавного пуска двигателя) - это полупроводниковый регулятор напряжения двигателя с низкими потерями, при котором может быть достигнут плавный пуск двигателя.
Устройство плавного пуска не изменяет скорость двигателя, оно изменяет скольжение двигателя. Устройство плавного пуска также может использоваться для управления скоростью вентилятора и аналогичных нагрузок с квадратичной зависимостью мощности от скорости.

Двигатель каменной мельницы на золотом руднике Санрайз Дам (в Западной Австралии). Это асинхронный двигатель Alstom 11000 В - 4000 кВт, произведенный в Нанси (Франция).
Двигатели с фазным ротором
Пускатель ротора подключается к кольцам ротора с помощью щеток, обычно состоящих из трех резисторов одинакового размера, которые постепенно устраняются. В конце пуска обмотка замыкается накоротко.
Кольцевой якорь в двигателе с фазным ротром предназначен для ограничения пусковых токов статора, а также для увеличения пускового момента при пуске. Такой способ пуска двигателя не изменяет его скорость, он изменяет скольжение двигателя.
Реверс
При изменении любых двух фазных проводов на клеммах двигателя изменяется направление вращения вращающегося поля, и двигатель вращается в противоположную сторону.
Управление скоростью вращения

где, S - скольжение, f - частота питающего напряжения , p - количество пар полюсов двигателя. Следовательно, мы можем регулировать скорость, изменяя любую из этих величин.
Регулирование путем изменения напряжения питания - основано на крутизне характеристики крутящего момента в зависимости от изменения напряжения на выводах двигателя с последующим изменением скольжения для заданного крутящего момента, т.е. путем смещения рабочей точки. Это выполняется переключением обмотки статора по схеме звезда / треугольник или добавлением полного сопротивления к питанию статора, автотрансформатору и т.п.
Самый популярный способ управления скоростью вращения асинхронных двигателей с короткозамкнутым ротором в настоящее время - изменения частоты питающей сети.
Подключив частотный преобразователь (инвертор), можно контролировать частоту и эффективное значение выходного напряжения и, следовательно, генерируемое магнитное поле статора.
Скорость синхронного двигателя соответствует выходной частоте инвертора. Выходная частота инвертора может быть ниже, равна или выше частоты сети.

Двигатель, приводимый в действие преобразователем частоты, в этом случае имеет скорость, отличную от скорости двигателя при прямом питании от сети, даже более высокой.
Скалярное управление - постоянное - можно установить номинальную величину магнитного потока. Он в основном регулирует выходную частоту и напряжение в соотношении U/f = const. Применяется для двигателей с низкими требованиями к динамическим свойствам (насосы, вентиляторы). Скалярное управление не может использоваться для управления двигателем в диапазоне близком к нулевой скорости.
Векторное управление - помимо величины магнитного потока, можно задать его направление и, таким образом, добиться плавного изменения скорости при любом режиме работы и нагрузки. Это лучший способ контролировать скорость. Векторное управление позволяет создавать крутящий момент даже в области нулевой скорости. Старые реализации векторного управления требовали датчика скорости, сегодня уже используются методы бессенсорной идентификации состояния машины.
Прямое управление крутящим моментом (DTC) - это также усовершенствованный метод управления, который не обеспечивает полную динамику на низких или нулевых скоростях. Преимущество этого способа состоит в том, что алгоритм управления прост, непосредственно генерирует состояние переключения транзисторов и не требует наличия датчика скорости или идентификации состояния машины.
Однофазные асинхронные двигатели
Однофазный асинхронный двигатель чаще всего используется там, где нет необходимости регулировать скорость двигателя во время работы машины, например, при приводе компрессоров в холодильниках, бытовых стиральных машинах, газонокосилках и вентиляторах.
Для регулирования скорости однофазных асинхронных двигателей можно использовать частотный преобразоваетль с питанием от однофазной сети переменного тока.
В обычных бытовых приборах, таких как электрические ручные инструменты, кухонные комбайны, пылесосы, фены, по-прежнему применяются коллекторные двигатели, которые имеют более высокую скорость вращения и, следовательно, меньший объем и вес для требуемой мощности. Серийное производство более сложных и требовательных к обслуживанию коллекторных универсальных двигателей хорошо управляемо и автоматизировано.

Трехфазные асинхронные двигатели в производственном цеху
Асинхронный двигатель как генератор
Трехфазный асинхронный двигатель может использоваться без доработок в качестве электрогенератора для производства электроэнергии. Благодаря своей простоте и необслуживаемой эксплуатации, он используется в качестве генератора, особенно на малых гидроэлектростанциях.
Скорость водяной турбины (или другого источника вращающейся энергии) должна быть изменена путем преобразования в сверхсинхронную скорость используемого асинхронного двигателя, то есть скольжением выше синхронного. Эта сверхсинхронная скорость затем поддерживается внешней электрической сетью.
Подачу воды в турбину необходимо регулировать так, чтобы частота вращения синхронного двигателя не уменьшалась и, как правило, не превышалась частота вращения синхронного двигателя в 1,5 раза. Когда скорость падает, двигатель переключается с рекуперативного на двигательный режим и начинает получать активную энергию из сети. Превышение скорости может привести к перегрузке в рекуперативном режиме и механической аварии.
Работа двигателя в качестве генератора вне оптимального диапазона скоростей снизит эффективность. Предпочтительно использовать многополюсные двигатели с более низкими рабочими скоростями (например, 1500 мин -1 ).
Гидравлические турбины обычно проектируются тихоходными. Необходимо быстро вставить коробку передач между турбиной и двигателем. Однако это означает более высокие механические потери мощности в коробке передач. При более низких номинальных оборотах двигателя существует риск проблем с охлаждением и, как следствие, перегрева и сокращения срока службы.
Запуск асинхронного двигателя в качестве генератора может выполняться оператором, который сначала подключает двигатель к трехфазной сети. При подключенной турбине двигатель вращается с номинальной скоростью, близкой к синхронной.
Затем оператор открывает затвор подачи воды в турбину. Двигатель начинает разгоняться до сверхсинхронной скорости. С этого момента двигатель подает электроэнергию в сеть, и внешняя сеть также определяет его скорость.
Отключение выполняется в обратном порядке, чтобы предотвратить опрокидывание и, как следствие, повреждение двигателя (турбина без нагрузки).
Например, если асинхронный двигатель имеет номинальную скорость 1430 мин -1 , это двигатель с двумя полупарами (шесть катушек, подключенных к трехфазной сети), его синхронная скорость составляет 1500 мин -1 , а скольжение равно 70 мин −1 (s = 6,7%). Такой двигатель будет оптимально работать как генератор на скорости 1500 + 70 = 1570 мин -1 (s = -6,7%).

Для своей работы асинхронный двигатель с приводом от двигателя потребляет полную мощность [ВА] из распределительной сети, которую можно разделить на активную [Вт] и реактивную мощность [вар].
Полная, активная и реактивная мощность больше нуля (в используемой системе потребителей они имеют положительный знак). Активная мощность в двигателе преобразуется в механическую мощность на выходном валу и потери, то есть тепло. Реактивная мощность передается только между двигателем и источником (или компенсатором). Он не вырабатывает мощность и вызывает активные потери.
Асинхронный двигатель в рекуперативном режиме потребляет механическую энергию от выходного вала приводной машины (турбины). Асинхронный двигатель в рекуперативном режиме подает полную мощность [ВА] в распределительную сеть. Он обеспечивает активную мощность [Вт] и потребляет реактивную мощность [вар]. Полная и активная мощность меньше нуля (в используемой системе потребителя они имеют отрицательный знак).
Реактивная мощность больше нуля и имеет положительный знак. Для работы асинхронного генератора требуется подключение к трехфазной сети.
Асинхронный двигатель не может работать независимо как асинхронный генератор (т.е. он не работает в случае отказа внешней распределительной сети). Помимо подачи реактивной мощности, распределительная сеть определяет частоту и, следовательно, скорость вращения асинхронного генератора.
Если механический источник энергии (турбина) не имеет подходящего ограничения максимальной скорости, необходимо отключить асинхронный генератор от турбины (или отсоединить турбину от источника воды) в случае отказа распределительной сети. В противном случае машина может перевернуться, рабочая скорость может быть превышена, и она может получить механическое повреждение.
Рекуперативный асинхронный двигатель в автономном режиме может работать в особых условиях. Асинхронный генератор получает механическую энергию от выходного вала приводной машины (турбины).

В электрическом отношении асинхронный генератор работает изолированно от внешних систем.
Скорость вращения асинхронного генератора и, следовательно, частота выходного напряжения генератора могут колебаться в зависимости от нагрузки и расхода воды через турбину. Это зависит от взаимного баланса механической мощности генератора и электрической мощности генератора. В этом случае асинхронный генератор обычно подключается к автономной сети, например, через частотный преобразователь, который регулирует выходное напряжение и частоту системы.
Асинхронный генератор в автономной сети является источником полной мощности [ВА]. Он подает активную мощность [Вт] в автономную сеть.
Потребляемая реактивная намагничивающая мощность генератора [вар] и потребляемая реактивная мощность автономной сети [вар] должны подаваться, например, от батареи компенсирующих конденсаторов.
Автономная система с асинхронным генератором должна быть оборудована цепями управления и регулирования. Например, частотный преобразователь может использоваться для поддержания фиксированной частоты. В остальном асинхронный двигатель в рекуперативном режиме в автономном режиме ведет себя так же, как при подключении к распределительной сети.
Пусковые свойства асинхронного двигателя оцениваются его пусковыми характеристиками:
а) величиной пускового тока Iп или его кратностью Iп/ I1н;
б) величиной пускового момента Мп или его кратностью Мп/Мн;
в) продолжительностью и плавностью пуска двигателя в ход;
г) сложностью пусковой операции;
д) экономичностью пусковой операции (стоимость и надежность пусковой аппаратуры).
В начальный момент пуска скольжение s = 1, поэтому, пренебрегая током холостого хода, величина пускового тока Iп будет равна
Iп = U1 / (√ [(r1 + r’2)2 + (x1 + x’2)2]).
Следовательно, улучшить пусковые свойства двигателя можно путем увеличения активного сопротивления цепи ротора r’2, так как в этом случае уменьшается пусковой ток и увеличивается пусковой момент. В то же время напряжение U1 по-разному влияет на пусковые характеристики: с уменьшением U1 пусковой ток уменьшается, что благоприятно влияет на пусковые свойства двигателя, но одновременно это вызывает уменьшение пускового момента. Возможность применения того или иного способа улучшения пусковых характеристик определяется условиями эксплуатации двигателя и требованиями, которые к нему предъявляются.
Практически используются следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к двигателю при пуске; подключение к обмотке ротора пускового реостата.
Прямой пуск применяется для двигателей малой и средней мощности. Обычно при прямом пуске действующее значение пускового тока превосходит номинальное значение в четыре - шесть раз.
Прямой пуск самый распространенный способ пуска в ход асинхронных двигателей. Недостатками его являются: большой пусковой ток и сравнительно малый пусковой момент, достоинство - простота.
Пуск асинхронного двигателя при пониженном напряжении применяют для двигателей большой мощности. Понижение напряжения может осуществляться тремя способами:
а) путем переключения обмотки статора при пуске с нормальной схемы "треугольник" на пусковую схему "звезда". В этом случае фазовое напряжение уменьшается в раз, что обуславливает уменьшение фазовых токов в раз и линейных токов в 3 раза. По окончании процесса пуска обмотку статора переключают на нормальную схему "треугольник".
Недостаток этого способа пуска состоит в том, что уменьшение напряжения в Ù1/U1н раз сопровождается уменьшением начального пускового момента Мп двигателя в (Ù1/U1н) 2 раз. Необходимое сопротивление реактора определяется по формуле:
где U1н – номинальное (фазное) напряжение статорной обмотки;
Kp = I’п /Iп – отношение пускового тока статора при пуске к пусковому току двигателя при пуске непосредственным включением в сеть; обычно Kp = 0,65.
б) путем включения в цепь статора на период пуска добавочных активных или реактивных сопротивлений.
в) путем подключения двигателя к сети через понижающий автотрансформатор. Секции трансформатора в процессе пуска переключаются соответствующей аппаратурой.
Автотрансформаторный способ пуска, как и другие способы пуска асинхронных двигателей, основанные на уменьшении подводимого напряжения, сопровождается уменьшением пускового момента, так как величина последнего прямо пропорциональна квадрату напряжения. С точки зрения пусковых токов и пусковых моментов, автотрансформаторный способ пуска выгоднее реакторного, так как при одинаковом уменьшении напряжения пусковой ток при реакторном способе пуска уменьшается в U’1 / U1н раз, а при автотрансформаторном способе пуска – в (U’1 / U1н)2 раз. Но сложность пусковой операции и высокая стоимость аппаратуры несколько ограничивают применение автотрансформаторного способа пуска асинхронных двигателей.
Недостатком всех этих способов является значительное уменьшение пускового момента, который пропорционален квадрату приложенного напряжения. Поэтому пуск асинхронного двигателя при пониженном напряжении может применяться только при пуске двигателей без нагрузки.

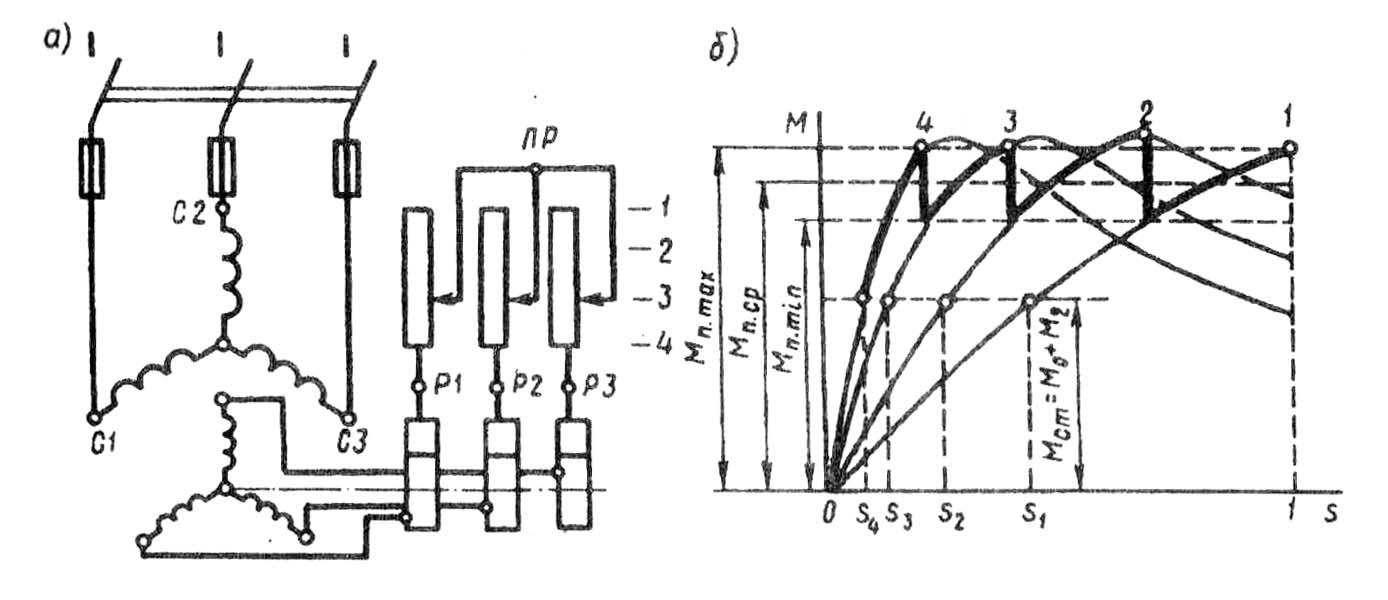
Пуск с помощью пускового реостата применяется для двигателей с фазовым ротором. Этим способом можно осуществить пуск двигателя при и резко уменьшить пусковой ток. Двигатели с фазовым ротором применяют только при тяжелых условиях пуска (когда необходимо развивать максимально возможный пусковой момент), при малой мощности электрической сети или при необходимости плавного регулирования скорости вращения.

Пусковые свойства асинхронных двигателей характеризуются начальным пусковым и максимальным моментами и начальным пусковым током. В двигателях с фазными роторами начальный момент и пусковой ток определяются сопротивлением пускового реостата. [1]
Пусковые свойства асинхронных двигателей с контактными кольцами зависят от сопротивления пускового реостата, включаемого в цепь обмотки ротора, поэтому кратности Ми / Мп и / ш / Лн в каталогах не приводятся. [3]
Пусковые свойства асинхронного двигателя определяются особенностями его конструкции, в частности устройством ротора. [4]
Пусковые свойства асинхронного двигателя определяются зависимостями вращающего момента и тока от частоты вращения. Эти характеристики определяют и другие показатели: длительность пуска, потери энергии в обмотках и, следовательно, их нагрев. Для уменьшения длительности пуска, потерь энергии в обмотках двигателя и их нагрева стремятся к увеличению пускового момента и снижению пускового тока. [5]
Начальный пусковой момент Мпуск характеризует пусковые свойства асинхронного двигателя . [6]
Коэффициент качества пуска у может характеризовать пусковые свойства асинхронных двигателей . Однако большое значение коэффициента у может оказаться у двигателя с недостаточно высокими энергетическими показателями. [7]
Как было отмечено ранее, коэффициент качества пуска у [ см. формулу (3.48) ] может характеризовать пусковые свойства асинхронных двигателей . Однако большое значение коэффициента у может оказаться у двигателя с недостаточно высокими энергетическими показателями. [8]
Пусковые свойства двигателя определяются в первую очередь значением пускового тока Iп или его кратностью Iп/ Iном и значением пускового момента Мп или его кратностью Мп/Мном. Двигатель, обладающий хорошими пусковыми свойствами, развивает значительный пусковой момент при сравнительно небольшом пусковом токе. Однако получение такого сочетания пусковых параметров в асинхронном двигателе сопряжено с определенными трудностями. В начальный момент пуска скольжение s = 1, поэтому, пренебрегая током х.х., пусковой ток можно определить подставив s = 1:

Iп = U1/.
Пусковой момент по

Mп =
Улучшить пусковые свойства двигателя можно увеличением активного сопротивления цепи ротора r2', так как в этом случае уменьшение пускового тока сопровождается увеличением пускового момента. В то же время напряжение U1 по-разному влияет на пусковые параметры двигателя: с уменьшением U1 пусковой ток уменьшается, что благоприятно влияет на пусковые свойства двигателя, но одновременно уменьшается пусковой момент. Целесообразность применения того или иного способа улучшения пусковых свойств двигателя определяется конкретными условиями эксплуатации двигателя и требованиями, которые предъявляются к его пусковым свойствам. Помимо пусковых значений тока Iп и момента Мп пусковые свойства двигателей оцениваются еще и такими показателями: продолжительность и плавность пуска, сложность пусковой операции, ее экономичность (стоимость и надежность пусковой аппаратуры и потерь энергии в ней).
Пуск двигателя с фазным ротором.
Наличие контактных колец у двигателей с фазным ротором позволяет подключить к обмотке ротора пусковой реостат. При этом активное сопротивление цепи ротора увеличивается до значения R2 = r2' + rд', где rд' — электрическое сопротивление пускового реостата, приведенное к обмотке статора. При выборе сопротивления пускового реостата rдоб исходят из условий пуска двигателя: если двигатель включают при значительном нагрузочном моменте на валу, сопротивление пускового реостата rдо6 выбирают таким, чтобы обеспечить наибольший пусковой момент; если же двигатель включают при небольшом нагрузочном моменте на валу, когда пусковой момент не имеет решающего значения для пуска, оказывается целесообразным сопротивление ПР rдоб выбирать несколько больше значения, соответствующего наибольшему пусковому моменту. В этом случае пусковой момент оказывается несколько меньшим наибольшего значения М п.mах, но зато пусковой ток значительно уменьшается.
Вопрос 47. Пуск асинхронных двигателей с короткозамкнутым ротором. Различные способы пуска, их схемы, достоинства и недостатки.
Пуск непосредственным включением в сеть. Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5—7 раз превышающий номинальный ток двигателя. При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток также быстро спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать в ней заметное падение напряжения. Однако этот способ пуска благодаря своей простоте получил наибольшее применение для двигателей мощностью до 38—50 кВт и более (при достаточном сечении жил токоподводящего кабеля). При необходимости уменьшения пускового тока двигателя применяют какой-либо из способов пуска короткозамкнутых двигателей при пониженном напряжении.
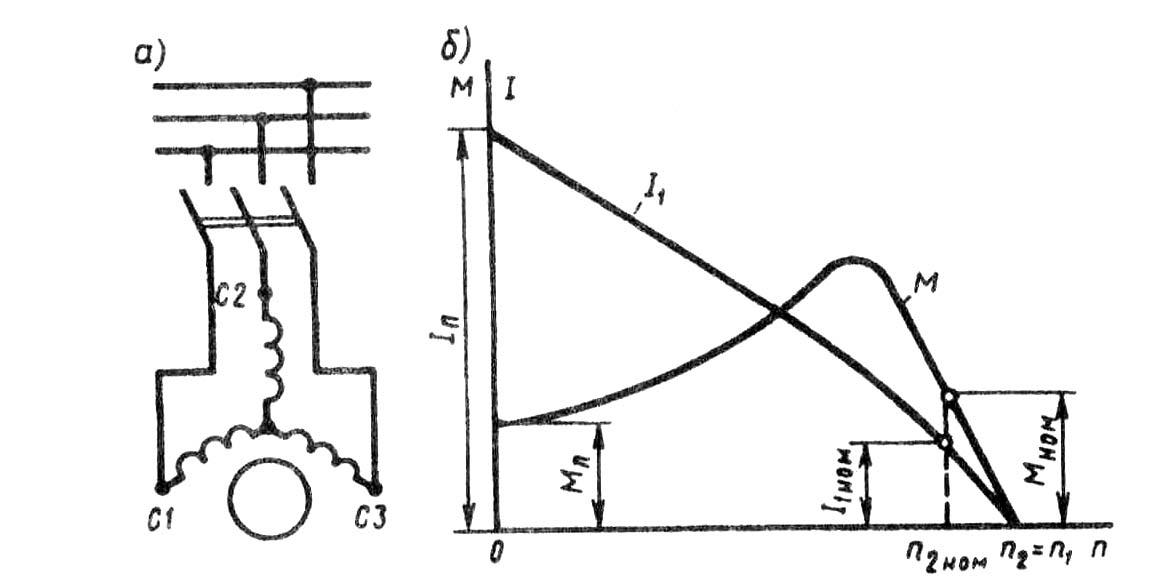
Схема непосредственного включения в сеть (а) и графики изменения тока и момента при пуске (б) асинхронного двигателя с короткозамкнутым ротором
Пуск при пониженном напряжении.
Пусковой ток двигателя пропорционален подведенному напряжению U1, уменьшение которого вызывает соответствующее уменьшение пускового тока.

Рассмотренный способ пуска имеет существенный недостаток - уменьшение фазного напряжения в раз сопровождается уменьшением пускового момента в три раза, так как, согласно (13.19), пусковой момент асинхронного двигателя прямо пропорционален квадрату напряжения U1. Такое значительное уменьшение пускового момента не позволяет применять этот способ пуска для двигателей, включаемых в сеть при значительной нагрузке на валу.
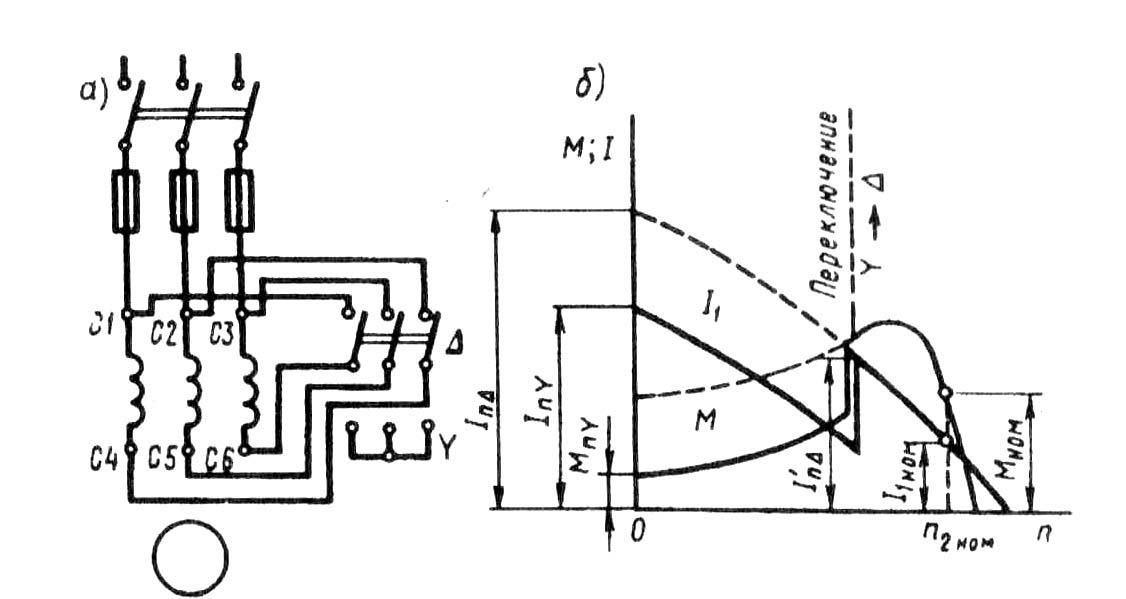
Схема включения (а) и графики изменения момента и тока (фазного) при пуске (б) асинхронного двигателя с короткозамкнутым ротором переключением обмотки статора со звезды на треугольник

Более универсальным является способ с понижением подводимого к двигателю напряжения посредством реакторов (реактивных катушек — дросселей). При разомкнутом рубильнике 2 включают рубильник 7. При этом ток из сети поступает в обмотку статора через реакторы Р, на которых происходит падение напряжения jхр (где хр — индуктивное сопротивление реактора, Ом). В результате на обмотку статора подается пониженное напряжение. После разгона ротора двигателя включают рубильник 2 и подводимое к обмотке статора напряжение оказывается номинальным. Недостаток этого способа пуска состоит в том, что уменьшение напряжения в U / 1/ U1ном раз сопровождается уменьшением пускового момента Мп в (U / 1/ U1ном) 2 раз.
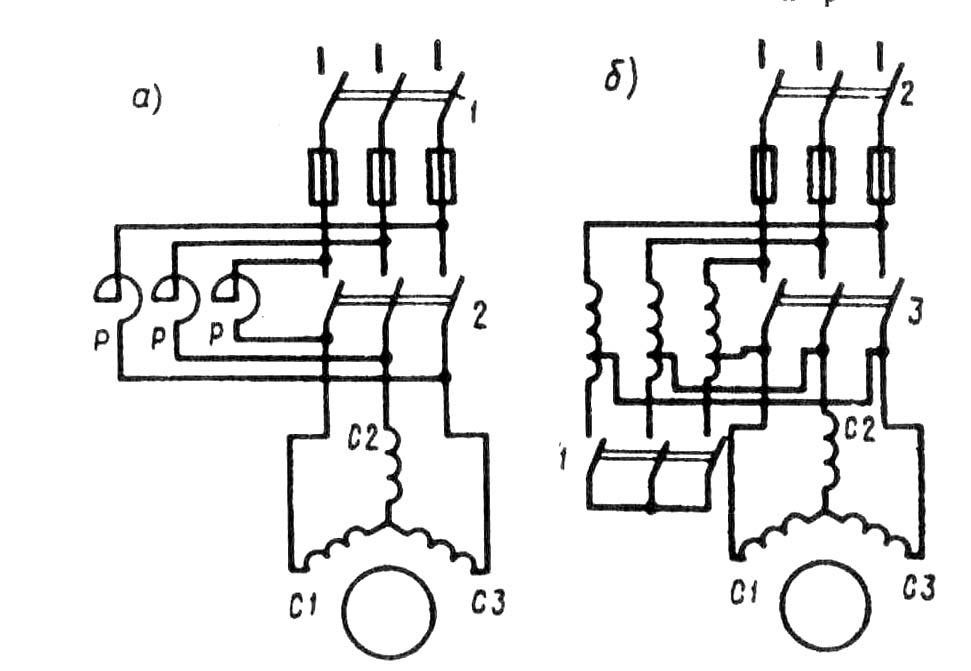
Схемы реакторного (а) и автотрансформаторного (б) способов пуска асинхронных двигателей с короткозамкнутым ротором
При пуске двигателя через понижающий автотрансформатор вначале замыкают рубильник 1, соединяющий обмотки автотрансформатора звездой, а затем включают рубильник 2 и двигатель оказывается подключенным на пониженное напряжение U / 1 . При этом пусковой ток двигателя, измеренный на выходе автотрансформатора, уменьшается в КА раз, где КА — коэффициент трансформации автотрансформатора. Что же касается тока в питающей двигатель сети, т. е. тока на входе автотрансформатора, то он уменьшается в К 2 А раз по сравнению с пусковым током при непосредственном включении двигателя в сеть. Дело в том, что в понижающем автотрансформаторе первичный ток меньше вторичного в КА раз и поэтому уменьшение пускового тока при автотрансформаторном пуске составляет КАКА = К 2 А раз. После первоначального разгона ротора двигателя рубильник 1 размыкают и автотрансформатор превращается в реактор. При этом напряжение на выводах обмотки статора несколько повышается, но все же остается меньше номинального. Включением рубильника 3 на двигатель подается полное напряжение сети. Таким образом, автотрансформаторный пуск проходит тремя ступенями: на первой ступени к двигателю подводится напряжение U1 = (0,50÷0,60)U1ном, на второй — U1 = (0,70÷0,80)U1ном и, наконец, на третьей ступени к двигателю подводится номинальное напряжение U1ном.
Как и предыдущие способы пуска при пониженном напряжении, автотрансформаторный способ пуска сопровождается уменьшением пускового момента, так как значение последнего прямо пропорционально квадрату напряжения. С точки зрения уменьшения пускового тока автотрансформаторный способ пуска лучше реакторного, так как при реакторном пуске пусковой ток в питающей сети уменьшается в U / 1/ U1ном раз, а при автотрансформаторном - в (U / 1/ U1ном) 2 раз.
Вопрос 48. Короткозамкнутые АД с улучшенными пусковыми характеристиками. Двигатель с глубокими пазами пазами на роторе и с двумя клетками на роторе. Конструкция, принцип действия, достоинства и недостатки.
Двигатель с глубокими пазами на роторе. От обычного асинхронного двигателя этот двигатель отличается тем, что у него пазы ротора сделаны в виде узких глубоких щелей, в которые уложены стержни обмотки ротора, представляющие собой узкие полосы. С обеих сторон эти стержни приварены к замыкающим кольцам. Обычно глубокий паз имеет соотношение размеров hп/ bп = 9÷10, где hп, bп — высота и ширина паза.
В момент включения двигателя, когда частота тока в роторе имеет наибольшее значение (f2 = f1), индуктивное сопротивление нижней части каждого стержня значительно больше верхней. Объясняется это тем, что нижняя часть стержня сцеплена с большим числом магнитных силовых линий поля рассеяния. Почти весь ток ротора проходит по верхней части стержня, поперечное сечение которой намного меньше сечения всего стержня. Это равноценно увеличению активного сопротивления стержня ротора, что, как известно, способствует росту пускового момента двигателя и некоторому ограничению пускового тока. Таким образом, двигатель с глубокими пазами на роторе обладает благоприятным соотношением пусковых параметров: большим пусковым моментом при сравнительно небольшом пусковом токе.
Двигатель с двумя клетками на роторе. Еще лучшими пусковыми свойствами обладают асинхронные двигатели с двумя короткозамкнутыми клетками на роторе: рабочей клеткой 1, стержни которой расположены в нижнем слое, и пусковой клеткой 2, стержни которой расположены в верхнем слое, ближе к воздушному зазору.
В момент пуска двигателя ток ротора проходит в основном по верхней (пусковой) клетке, обладающей малым индуктивным сопротивлением. При этом плотность тока в стержнях пусковой клетки намного больше плотности тока в стержнях рабочей клетки. Повышенное активное сопротивление этой клетки обеспечивает двигателю значительный пусковой момент при пониженном пусковом токе. По мере увеличения частоты вращения ротора уменьшается частота тока в роторе, при этом индуктивное сопротивление рабочей клетки уменьшается, и распределение плотности тока в стержнях пусковой и рабочей клеток становится почти одинаковым. В итоге происходит перераспределение вращающего момента между клетками: если в начальный период пуска момент создается главным образом токами пусковой клетки, то по окончании периода пуска вращающий момент создается в основном токами рабочей клетки. Максимальное значение момента пусковой клетки вследствие ее повышенного активного сопротивления смещено в сторону скольжений, близких к единице. Вращающие моменты от обеих клеток направлены в одну сторону, поэтому результирующий момент двигателя равен сумме моментов пусковой Мпк и рабочей Мраб.к клеток М = Мп.к + Мраб.к
Двигатели с двумя клетками на роторе по сравнению с асинхронными двигателями обычной конструкции имеют повышенную стоимость, что объясняется сложностью конструкции.
Читайте также: