
Результирующая сила определение кратко
Обновлено: 04.07.2024
Если механическая система, например тело, покоится или движется с постоянной скоростью, то говорят, что тело находится в равновесии.
Статика – раздел механики, изучает условия равновесия механических систем (тел). Рассмотрим основные понятия и физические величины, которые используются в этом разделе механики.
Материальная точка – тело, размерами которого в условиях данной задачи можно пренебречь
Абсолютно твердое тело – тело, деформацией которого в условиях данной задачи можно пренебречь. Для абсолютно твердого тела расчет равновесия тела значительно упрощается, а результаты расчетов можно применить к реальным телам, деформация которых незначительна.
Результирующая внешних сил, действующих на данное тело. Это понятие (физическая величина) нам уже знакомо по разделу – динамика. В статике мы расширим это понятие применительно к протяженным телам.
Момент силы – физическая величина, является мерой силового воздействия для случая, когда тело может совершать вращательное движение. Необходимость введения этой физической величины связана с тем, что при вращательном движении тела результат воздействия определяется не только величиной и направлением действующей силы, но и тем, на каком расстоянии от оси вращения проходит линия действия силы.
Рассмотрим протяженное тело в виде диска, способное вращаться относительно оси О (рис.6.1). На тело действуют три одинаковые по величине и по направлению силы , и . Но результат действия этих сил различен. Под действием силы диск поворачивался бы по часовой стрелке относительно оси О, под действием силы - против часовой стрелки, действие силы не приводит к вращению диска. Видим, что сила не является исчерпывающей характеристикой воздействия при вращательном движении. Таковой характеристикой воздействия в динамике вращательного движения является момент силы.
Момент силы определяется как произведение силы на плечо этой силы. Плечом силы называется кратчайшее расстояние от линии действия силы до оси вращения (рис. 6.1). Если сила поворачивает тело по часовой стрелке относительно оси вращения, то момент М такой силы будем считать положительным. Если сила поворачивает тело против часовой стрелке относительно оси вращения, то момент М такой силы будем считать отрицательным. Рассмотрим, какие моменты создают силы , и , действующие на тело, представленное на рисунке:
М1 = +F1l1 – момент М1 положительный, сила поворачивает диск по часовой стрелке;
М2 = F2l2 =0 – момент М2 равен нулю, т.к. плечо l2 силы равно нулю;
М3 = -F3l3 – момент М3 отрицательный, сила поворачивает диск против часовой стрелки.
Нахождение результирующей силы, действующей на тело:
1) вектор результирующей силы: ;
2) линия действия результирующей силы определяется исходя из того, что момент результирующей силы относительно любой оси вращения равен сумме моментов действующих сил: .
Статика. Основные понятия и физические величины.
Если механическая система, например тело, покоится или движется с постоянной скоростью, то говорят, что тело находится в равновесии.
Статика – раздел механики, изучает условия равновесия механических систем (тел). Рассмотрим основные понятия и физические величины, которые используются в этом разделе механики.
Материальная точка – тело, размерами которого в условиях данной задачи можно пренебречь
Абсолютно твердое тело – тело, деформацией которого в условиях данной задачи можно пренебречь. Для абсолютно твердого тела расчет равновесия тела значительно упрощается, а результаты расчетов можно применить к реальным телам, деформация которых незначительна.
Результирующая внешних сил, действующих на данное тело. Это понятие (физическая величина) нам уже знакомо по разделу – динамика. В статике мы расширим это понятие применительно к протяженным телам.
Момент силы – физическая величина, является мерой силового воздействия для случая, когда тело может совершать вращательное движение. Необходимость введения этой физической величины связана с тем, что при вращательном движении тела результат воздействия определяется не только величиной и направлением действующей силы, но и тем, на каком расстоянии от оси вращения проходит линия действия силы.

Рассмотрим протяженное тело в виде диска, способное вращаться относительно оси О (рис.6.1). На тело действуют три одинаковые по величине и по направлению силы , и . Но результат действия этих сил различен. Под действием силы диск поворачивался бы по часовой стрелке относительно оси О, под действием силы - против часовой стрелки, действие силы не приводит к вращению диска. Видим, что сила не является исчерпывающей характеристикой воздействия при вращательном движении. Таковой характеристикой воздействия в динамике вращательного движения является момент силы.
Момент силы определяется как произведение силы на плечо этой силы. Плечом силы называется кратчайшее расстояние от линии действия силы до оси вращения (рис. 6.1). Если сила поворачивает тело по часовой стрелке относительно оси вращения, то момент М такой силы будем считать положительным. Если сила поворачивает тело против часовой стрелке относительно оси вращения, то момент М такой силы будем считать отрицательным. Рассмотрим, какие моменты создают силы , и , действующие на тело, представленное на рисунке:
М1 = +F1l1 – момент М1 положительный, сила поворачивает диск по часовой стрелке;
М2 = F2l2 =0 – момент М2 равен нулю, т.к. плечо l2 силы равно нулю;
М3 = -F3l3 – момент М3 отрицательный, сила поворачивает диск против часовой стрелки.
Нахождение результирующей силы, действующей на тело:
1) вектор результирующей силы: ;
2) линия действия результирующей силы определяется исходя из того, что момент результирующей силы относительно любой оси вращения равен сумме моментов действующих сил: .
Результирующая сила – это векторная сумма всех сил, действующих на данное тело.
Если тело некоторой массы m двигалось под действием приложенных сил, и его скорость изменилась от до то силы совершили определенную работу A.
Работа всех приложенных сил равна работе равнодействующей силы
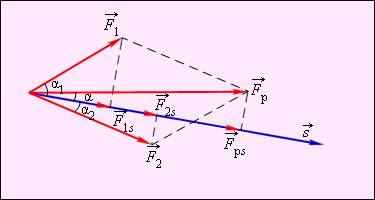

Работа равнодействующей силы.
A = F1s cos α1 + F2s cos α2 = F1ss + F2ss = Fрss = Fрs cos α
Между изменением скорости тела и работой, совершенной приложенными к телу силами, существует связь. Эту связь проще всего установить, рассматривая движение тела вдоль прямой линии под действием постоянной силы В этом случае векторы силы перемещения скорости и ускорения направлены вдоль одной прямой, и тело совершает прямолинейное равноускоренное движение. Направив координатную ось вдоль прямой движения, можно рассматривать F, s, υ и a как алгебраические величины (положительные или отрицательные в зависимости от направления соответствующего вектора). Тогда работу силы можно записать как A = Fs. При равноускоренном движении перемещение s выражается формулой

Отсюда следует, что

Это выражение показывает, что работа, совершенная силой (или равнодействующей всех сил), связана с изменением квадрата скорости (а не самой скорости).
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела:

Работа приложенной к телу равнодействующей силы равна изменению его кинетической энергии.

Это утверждение называют теоремой о кинетической энергии. Теорема о кинетической энергии справедлива и в общем случае, когда тело движется под действием изменяющейся силы, направление которой не совпадает с направлением перемещения.

Кинетическая энергия – это энергия движения. Кинетическая энергия тела массой m, движущегося со скоростью равна работе, которую должна совершить сила, приложенная к покоящемуся телу, чтобы сообщить ему эту скорость:

Закон сохранения энергии при абсолютно упругом и абсолютно неупругом ударе.
Закон сохранения механической энергии
Если тела, составляющие замкнутую механическую систему, взаимодействуют между собой только посредством сил тяготения и упругости, то работа этих сил равна изменению потенциальной энергии тел, взятому с противоположным знаком:
По теореме о кинетической энергии эта работа равна изменению кинетической энергии:

Или Ek1 + Ep1 = Ek2 + Ep2.
Сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой посредством сил тяготения и сил упругости, остается неизменной.
Это утверждение выражает закон сохранения энергии в механических процессах. Он является следствием законов Ньютона. Сумму E = Ek + Ep называют полной механической энергией. Закон сохранения механической энергии выполняется только тогда, когда тела в замкнутой системе взаимодействуют между собой консервативными силами, то есть силами, для которых можно ввести понятие потенциальной энергии.
Ударом (или столкновением) принято называть кратковременное взаимодействие тел, в результате которого их скорости испытывают значительные изменения. Во время столкновения тел между ними действуют кратковременные ударные силы, величина которых, как правило, неизвестна. Поэтому нельзя рассматривать ударное взаимодействие непосредственно с помощью законов Ньютона. Применение законов сохранения энергии и импульса во многих случаях позволяет исключить из рассмотрения сам процесс столкновения и получить связь между скоростями тел до и после столкновения, минуя все промежуточные значения этих величин.
В механике часто используются две модели ударного взаимодействия – абсолютно упругий и абсолютно неупругий удары.
Абсолютно неупругим ударом называют такое ударное взаимодействие, при котором тела соединяются (слипаются) друг с другом и движутся дальше как одно тело.
При абсолютно неупругом ударе механическая энергия не сохраняется. Она частично или полностью переходит во внутреннюю энергию тел (нагревание).
Абсолютно упругим ударом называется столкновение, при котором сохраняется механическая энергия системы тел.
Во многих случаях столкновения атомов, молекул и элементарных частиц подчиняются законам абсолютно упругого удара.
При абсолютно упругом ударе наряду с законом сохранения импульса выполняется закон сохранения механической энергии.
Простым примером абсолютно упругого столкновения может быть центральный удар двух бильярдных шаров, один из которых до столкновения находился в состоянии покоя.
Центральным ударом шаров называют соударение, при котором скорости шаров до и после удара направлены по линии центров.

В общем случае массы m1 и m2 соударяющихся шаров могут быть неодинаковыми. По закону сохранения механической энергии

Здесь υ1 – скорость первого шара до столкновения, скорость второго шара υ2 = 0, u1 и u2 – скорости шаров после столкновения.
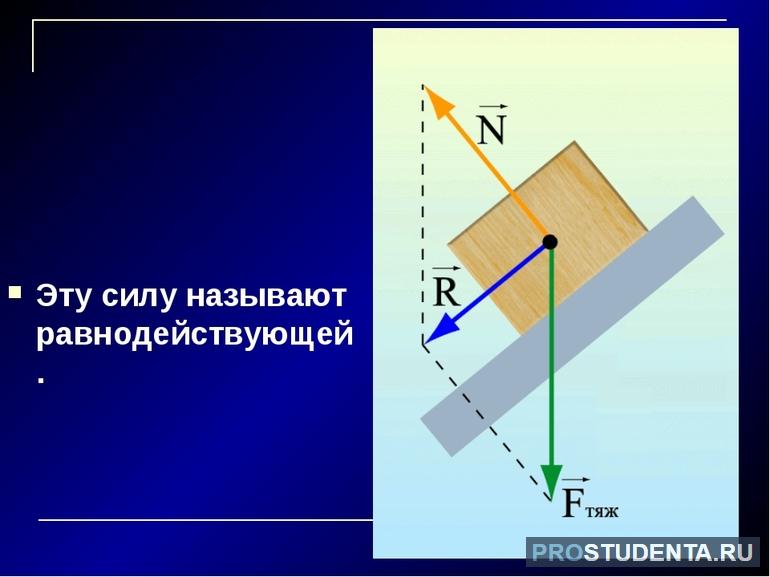
Сила, равная геометрической сумме всех приложенных к телу (точке) сил, называется равнодействующей или результирующей силой.
Результирующая сила - векторная сумма всех внешних сил действующих на систему.
вроде так.
Мы постоянно добавляем новый функционал в основной интерфейс проекта. К сожалению, старые браузеры не в состоянии качественно работать с современными программными продуктами. Для корректной работы используйте последние версии браузеров Chrome, Mozilla Firefox, Opera, Microsoft Edge или установите браузер Atom.
Равнодействующая (результирующая) сила — это векторная величина, используемая в физической механике при изучении законов взаимодействия нескольких тел. Она была открыта английским физиком Исааком Ньютоном во второй половине XVII столетия. Эта величина равна сумме всех сил, оказывающих непосредственное воздействие на физическое тело. Она изучается на уроках физики в 9 классе.
Равнодействующая (результирующая) сила — это векторная величина, используемая в физической механике при изучении законов взаимодействия нескольких тел. Она была открыта английским физиком Исааком Ньютоном во второй половине XVII столетия. Эта величина равна сумме всех сил, оказывающих непосредственное воздействие на физическое тело. Она изучается на уроках физики в 9 классе.
Основные характеристики
Равнодействующую силу характеризуют три основных параметра:
- модуль;
- направление;
- точка приложения.
В системе СИ единицей измерения этой величины является Ньютон (H). Также она может измеряться в кг*м/с 2 . Проекции равнодействующей силы на декартовой плоскости могут быть как положительными, так и отрицательными. Модуль и направление вектора не зависят от выбранной системы отсчета.
Для подробного описания данной векторной величины необходимо знать основные особенности нахождения векторной суммы и условия равновесия рычага.
Сложение величин
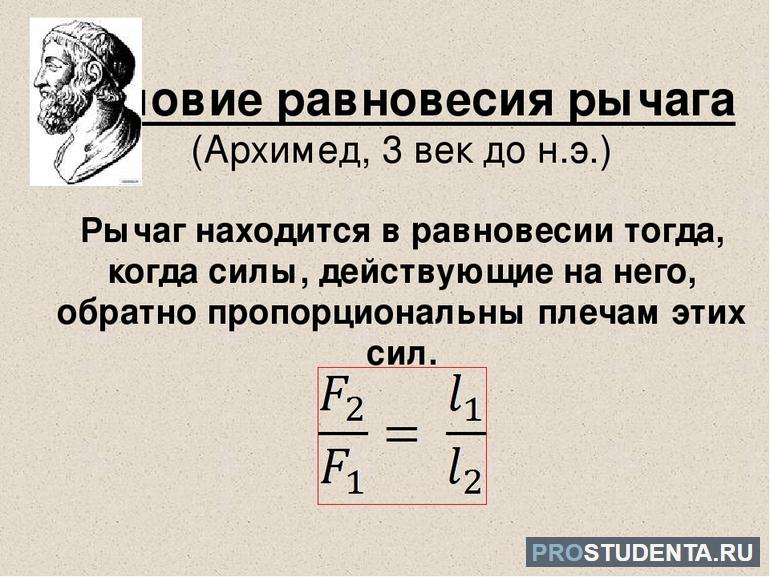
Если на физическое тело действуют одновременно два предмета, то оно начинает двигаться с ускорением. Они могут иметь разную массу и размер. В этом случае объекты, действующие на физическое тело, суммируются по правилу сложения векторных величин. Вектор суммы этих величин будет являться результирующей силой. Прямая, проходящая через точку соприкосновения векторов, называется линией действия. Если объекты действуют на физическое тело перпендикулярно друг другу, то равнодействующая сила будет приложена к их точке пересечения. В противном случае она будет рассчитываться по формуле: F 1 l 1 = F 2 l 2.
Условия равновесия рычага
- Поступательное: при перемещении объект не изменяет свою форму и размерные характеристики.
- Вращение: движение тела по кругу. В этом случае траекторией всех точек движущегося объекта являются дуги окружностей с единым центром — точкой вращения.
Если во время движения тело сохраняет свою форму, то оно находится в равновесии. В этом случае вектор суммы равен 0. При вращении тело находится в покое, если соблюдается общее условие равновесия. Геометрическая и алгебраическая сумма всех моментов сил, приложенных к объекту, должны равняться 0.
Фундаментальные взаимодействия
Равнодействующая сила зависит от 4 видов фундаментальных взаимодействий:
- Гравитационное: характерно для всех материальных объектов, имеющих вес. Оно основано на законе Всемирного тяготения, созданного Исааком Ньютоном. С помощью гравитационного взаимодействия описывается движение планет Солнечной системы. В этом случае между 2 телами действует сила притяжения. Гравитационное взаимодействие обуславливается гравитонами — элементарными частицами, из которых состоит большинство макрообъектов.
- Электромагнитное: характерно для электрически заряженных объектов. При движении тел возникают электрическое и магнитное поля. В результате тела, находящие на близком расстоянии, начинают притягиваться или отталкиваться. Характер электромагнитного взаимодействия определяется знаком заряда. При изменении агрегатного состояния тела начинают двигаться в противоположных направлениях. Электромагнитное взаимодействие основано на законах электродинамики и электростатики, описывающих связь между магнитными и электрическими полями.
- Сильное: возникает между адронами и кварками — фундаментальными бесструктурными частицами. Оно обеспечивает баланс между отрицательными и положительными частицами в ядерных реакциях. Сильное взаимодействие отличается небольшим радиусом действия, равным атому ядра.
- Слабое: характеризует основные разновидности бета-взаимодействий. Радиус его действия составляет 10 −18 м. В процессе слабого взаимодействия принимают участие лептоны и кварки, обладающих проникающей способностью. Они могут обмениваться тепловой энергией и квантами.
Интенсивность фундаментальных взаимодействий рассчитывается в единицах энергии, называемых электрон-вольтами.
Второй закон Ньютона
Второй закон Ньютона является одним из основных правил динамики. Он действует только в инерциальных системах отсчета. На основе этого закона ученый смог выявить следующие закономерности:
- Ускорения тел, на которые воздействуют объекты с одинаковым весом, обратно пропорциональны их массам.
- Если к физическому объекту приложены 2 силы с разными модулями и направлениями, то его ускорение будет прямо пропорционального его массе.
При помощи этих утверждений Ньютон сформулировал следующее определение: сила, воздействующая на тело, равна произведению его массы на ускорение.
На основе второго закона Ньютона была выявления формула равнодействующей силы: F = ma. В этом выражении m является массой, характеризующей инертные свойства физического тела, a — ускорение, определяющее интенсивность изменения скорости движения объекта. Результирующая сила равна 0, если она компенсируется иной мерой физического воздействия, противоположной по направлению и одинаковой по модулю. Если эта физическая величина не равна 0, то тело движется с ускорением. Это значит, что оно не находится в равновесии.
Нахождение силы
Чтобы найти результирующую силу, необходимо выполнить следующий алгоритм действий:
- Обозначить все величины, оказывающие воздействие на физический объект. Для обозначения чаще всего используется латинская буква F. В физике основные переменные не могут обозначаться при помощи символов русского алфавита. Важно показать, что силы являются векторными величинами. Для этого нужно над буквой нарисовать стрелку.
- Построить координатные оси и обозначить на них координаты тела.
- Отметить проекции векторов на оси. На основе графика нужно записать уравнение движения.
Если на графике присутствуют участки, где тело движется равномерно или находится в равновесии, то сумма проекций равняется 0. Если есть участки, где объект снижает или повышает свою скорость, то результирующая сила должна определяться при помощи массы на ускорение. При знании этой величины человек сможет определить работу тела по формуле: W F = 0 n W (Fk).
Пример решения задачи
Даны силы тяжести, трения и реакции опоры. Также известна мера механического воздействия на тело. Объект движется по горизонтальной поверхности. Необходимо найти вектор направления результирующей силы.
Для решения этой задачи необходимо построить оси координат и обозначить на них все величины, воздействующие на тело. При черчении графика важно знать, в каком направлении движется объект. На следующем рисунке изображена координатная плоскость с обозначенными векторами.
После построения графика необходимо найти проекции на следующие оси:
- Ox: F x = F, F x тр = -Fxтр, N x = 0, F т = 0.
- Oy: F y = 0, F y тр = 0, N y = N, F т = - F т.
После этого необходимо записать уравнение:
Тело движется с ускорением. Его прижимают силы тяжести, трения и упругости. Вектор ускорения направлен вниз. Это обусловлено мерой механического воздействия, оказывающего давление на объект. Из этого следует, что вектор равнодействующей силы также направлен вниз.
Читайте также: