
Рабочие характеристики асинхронного двигателя кратко
Обновлено: 08.07.2024
Механические и электрические характеристики асинхронных электродвигателей
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных.
Механические характеристики электродвигателя представляют собой зависимость угловой скорости ω от развиваемого им момента на валу, т.е. ω = f (M). Различают естественные и искусственные механические характеристики электродвигателя.
Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика соответствует работе электродвигателя с параметрами, отличающимися от номинальных, например, при введении сопротивления, изменении питающего напряжения, частоты и др.
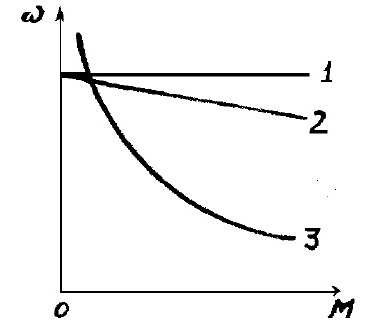
Механические характеристики электродвигателей: 1 - абсолютно жесткая характеристика, 2 - жесткая характеристика, 3 - мягкая механическая характеристика
Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся.
Естественная механическая характеристика асинхронного двигателя
Для примера рассмотрим АИР80В2У3.

Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √( 3046 2 - 2650 2 ) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
Скорость вращательного движения на практике часто оценивается частотой вращения, то есть числом оборотов вала двигателя в минуту. Угловая скорость выражается в радианах в секунду (рад/с). Угловой скоростью удобнее пользоваться при выводе формул и проведении расчетов, частотой вращения - при практической оценке скоростных свойств двигателей.
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Но поскольку двигатель асинхронный, то п оявление в обмотке ротора ЭДС и вращающего момента возможно только при наличии разности между скоростями магнитного поля и ротора. Это различие называют скольжением (s). Ротор вращается с отставанием на величину скольжения .
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ( ( n – n1 )/ n) *100%
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя
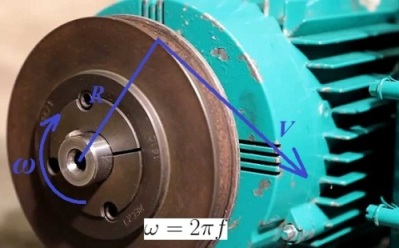
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.

Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие.
Механическая характеристика.
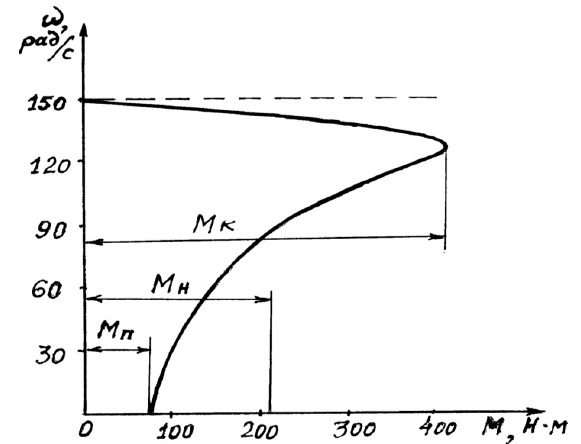
Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора.
Как показывает кривая на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некотором скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В).
Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками.
При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками.
Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.

Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рабочие характеристики.
Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия η и cosφ1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264).

Рис. 264. Рабочие характеристики асинхронного двигателя
Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cosφ1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9.
Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз.
Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы).
Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении.
Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз.
При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении.
Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты.
Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
Асинхронные электродвигатели представляют собой полноценные системы, качество работы которых определяется техническими характеристиками. Для чего они нужны и каким образом измеряются и изменяются, мы опишем далее. Параметры двигателя – первое, что необходимо знать перед началом его эксплуатации.

Для того, чтобы обеспечить нормальную слаженную работу асинхронных силовых агрегатов, необходимо знать все об этих моторах, в частности, их рабочие и механические характеристики. Это необходимо, как при покупке компонентов в магазине, так при реализации их своими руками. Также, при помощи правильного регулирования этих показателей, вы сможете успешно управлять работой двигателя, обеспечивая не только высокую продуктивность, но и снижение энергозатрат.
Общие параметры
По умолчанию, стандартная машина асинхронного типа (без доработок и модификаций) включает 2 основных компонента:
- статор – неподвижную деталь;
- ротор – деталь, поддающаяся вращениям.
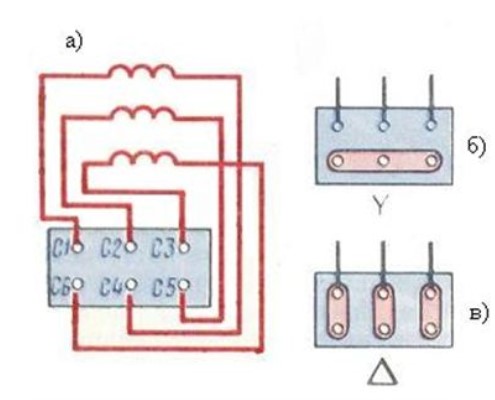
Конкретная схема для построения, выбирается с учетом паспортных данных электродвигателя и показателей сетевого напряжения, от которого будет производиться питания.
Основная задача статора – создание магнитного поля внутри мотора, которое бесперебойно вращается. Ротор же бывает двух видов – фазный и короткозамкнутый. Последний имеет скорость оборотов, которая не поддается регулированию. Применение такого компонента в силовом агрегате делает конструкцию проще и дешевле. Момент запуска у таких устройств, правда, низкий, чего не скажешь о моторах с ротором фазным. У него скорость вращения управляется при помощи ввода вспомогательного сопротивления.
Принцип действия мотора
Первое, что осуществляется – на статорную обмотку подается электрическое напряжение. По каждой отдельной фазе можно видеть постоянно меняющиеся магнитные потоки, смещенные по отношению друг к другу на угол 120 градусов. В результате получается общий результирующий поток, который также вращаемый, а с его помощью создается электродвижущая сила внутри роторных проводников.
Именно так в результате получается ток, который совмещается с потоком результирующим, что создает момент пуска. А он в свою очередь приводит ротор в движение.
Это общее, упрощенное описание принципа действия силового агрегата с разными скоростями оборотов. Для того, чтобы рассмотреть работу мотора, стоит углубиться в механические и рабочие характеристики, точно влияющие на вышеописанный алгоритм срабатывания.
Механическая характеристика
Суть данного параметра состоит в прямой зависимости частоты оборотов ротора от показателей нагрузки. То есть, от момента вращения на валу. Когда нагрузка находится на номинальном уровне, то частота вращений для разнотипных моторов варьируется в диапазоне от 92,5 до 98% от частоты оборотов n1. Скольжение (Sном) при этом не превышает уровень в 2 – 7,5%.

Чем выше уровень нагрузки, с которой работает мотор, тем ниже частота оборотов электрического мотора. Частота оборотов асинхронного двигателя несущественно снижается при усилении нагрузки в пределах от нуля до максимального значения. Визуально это можно видеть выше, на рисунке А. из этого следует, что электрический агрегат относится к моторам с жесткой механической характеристикой.
М макс., то есть наибольший крутящий момент, агрегат развивает, когда имеется определенное скольжение (Skp), который находится на уровне от 10 до 20 процентов. Соотношение величин Ммакс и Мном указывает на перегрузочную способность мотора. Отношение же Мп к М номинальному, указывает на пусковые качества электродвигателя.
Электрический мотор способен стойко и бесперебойно работать при условии обеспечения самостоятельного регулирования, когда будет автоматически установлено равновесие между моментом нагрузки, нацеленным на вал (Мвн) и М моментом, который развивает непосредственно двигатель. Это условие отлично отображается на верхней части характеристики, при достижении максимального показателя М. Другими словами — до уровня точки В.
В ситуациях, когда момент нагрузки М превышает показатель М макс., то мотор имеет сниженную устойчивость и останавливается. Параллельно с этим по машинным обмоткам будет довольно долго подаваться ток в несколько раз выше номинального, что может привести к перегоранию. Температура деталей растет, из-за превышенного электричества.
При подключении в электрическую цепь роторных обмоток от пускового реостата, на выходе мы получим полный набор механических характеристик. Первый параметр при эксплуатации мотора без стартового реостата, называют естественной характеристикой. Второй, третий и четвертый показатель, которые получаются при подсоединении к роторной обмотке двигателя реостата, обладают сопротивлениями R1п (2п и 3п соответственно), относятся к механическим характеристикам реостатного типа.
Когда же проводится запуск пускового реостата, механическую характеристику называют мягкой или крутопадающей. Это обусловливается тем, что существенно возрастает показатель активного сопротивления роторной цепи R2 и увеличивается Sкр. Параллельно с этим снижается ток запуска. Данная величина (Мп) также регулируется R2. При этом, существует возможность подобрать реостат с определенным сопротивлением, для того, чтобы момент пуска (Мп) равнялся максимальному М.
Электромеханическая характеристика
Показатель является зависимостью угловой скорости оборотов от статорного тока. При использовании сразу нескольких опорных точек можно создать такую характеристику. Для этого проводят расчет таких величин:



Все эти значения максимально точно отображают электромеханическую характеристику.
Рабочие характеристики
Данные параметры указывают на зависимости от полезной мощности Р2 = Р макс. таких показателей:
- частот вращений (n) или скольжения (S);
- валового момента (М2);
- статорного тока I1 ;
- КПД (коэффициента полезного дейс твия ).

При этом значения частоты f1 и напряжения U1 должны быть на номинальных уровнях. Они реализуются для областей устойчивого срабатывания мотора. Это означает, что диапазон должен быть от нулевого скольжения до того, которое превышает номинальное на 10 – 20%.
Частота оборотов при растущей отдаваемой мощности мало поддается изменениям. Это уже можно было видеть в механической характеристике, тогда, когда валовый момент М2 пропорциональный показателю мощности Р2. Крутящий момент ниже, чем электромагнитный момент, разница представляет собой значение момента торможения Мтр, который генерируется силами трения.
Статорный ток I1 увеличивается вместе с отдаваемой мощностью, но, когда показатель Р2 равен нулю, присутствует определенный ток для работы на холостых оборотах – I0. Уровень КПД также снижается, практически идентично, как у трансформатора, сохраняя довольно-таки высокое значение, в относительно широком спектре нагрузок.
Наибольший коэффициент полезного действия для асинхронных силовых агрегатов со средними и большими мощностями, варьируется в пределах 0,75 – 0,95. Чем выше мощность машины, тем больше у нее КПД.
Мощностной коэффициент косинус ϕ1 у асинхронных моторов аналогичных характеристик при наличие максимальной нагрузки составляет 0,7 – 0,9.
Исходя из этого, можно видеть, что силовые агрегаты перегружают электрические подстанции и сети питания своими довольно внушительными токами, которые могут достигать от 40 до 70% от номинальных токов. Это – один из самых весомых недостатков установок такого типа.
Если же моторные нагрузки на порядок меньше, например 25 – 50% от рабочих, то мощностной коэффициент падает до недостаточных значений – 0,5 – 0,75. Когда осуществляется снятие нагрузки с мотора, коэффициент мощности уменьшается еще и новые показатели составляют 0,25 – 0,3. Именно поэтому нельзя допускать, чтобы асинхронный двигатель функционировал длительное время на холостых оборотах, а также при существенных недогрузках.
Работа на пониженных напряжениях или с обрывами фаз
Сниженное напряжение в питающей сети существенно не влияет на показатели частоты оборотов роторных элементов асинхронного мотора. При этом также уменьшается показатель наивысшего крутящего момента, который позволяет развить ресурс мотора. К примеру, когда происходит понижение на 30%, момент вращения сокращается приблизительно в два раза. Это обусловливает то, что когда напряжение падает несущественно, мотор может остановиться, а при низком – не запуститься.
На эквивалентное последовательное сопротивление (Э.П.С) переменного тока питания при снижении напряжения в сети контактного типа параллельно снижается уровень напряжении в сетях с тремя фазами. От таких источников питаются двигатели асинхронного типа, которые приводят в движение вспомогательные компоненты производственного оборудования: гидравлические и пневматические насосы, компрессорные установки, вентиляторы и др.
Для обеспечения нормальной работы моторов на пониженных уровнях напряжения (их рабочий процесс должен осуществляться без сбоев при падении напряжения до 0,75 U ном), величины мощности должны быть с определенными показателями. Эти данные сводятся к тому, что мощности всех вспомогательных компонентов на Э.П.С берутся с показателями, приблизительно в полтора раза большими, чем требуется для приведения их в действие с номинальным напряжением.
Такой высокий запас ресурса необходим через наличие несимметрии напряжений фазного типа. Это обусловливается тем, что на последовательном сопротивлении, двигатели питаются от фазного расцепителя, а не от генератора на 3 фазы.
Асимметричность напряжений обусловливает различия в напряжениях фазовых токов, а также сдвиги между ним, которые не будут иметь углы в 120 градусов. Такое явление обусловливает то, что по одной фазе будет подаваться ток с более высокими показателями, что вызовет нагрев намоток этой же фазы. Чтобы этого не возникало, необходимо ограничивать нагрузку на мотор, сравнительно с его работой при напряжениях симметричного типа.

Обрывы фаз также имеют место в работе асинхронного двигателя. При возникновении такой ситуации мотор работает и дальше, но, при этом, по целым фазам будут идти токи на повышенных уровнях. Это в свою очередь также вызовет нагрев катушек, из-за чего функционирование в таких режимах не допускается. Запуск агрегата с поврежденными обмотками невозможен, что обусловливается недостаточным магнитным полем, которое не приведет в движение ротор.
Когда в контактной части количество оборотов уменьшается то, как правило – подача вспомогательного оборудования остается неизменной. В моторах постоянного тока, частоты оборотов прямо пропорциональны напряжению питания, исходя из этого, подача машин меняется.
Основные характеристики асинхронных электродвигателей
Наибольшее распространение имеет трехфазный асинхронный электродвигатель. Электродвигатели постоянного тока и синхронные применяются редко.
Большинство электрифицированных машин нуждаются в приводе мощностью от 0,1 до 10 кВт, значительно меньшая часть — в приводе мощностью в несколько десятков кВт. Как правило, для привода рабочих машин используются короткозамкнутые трехфазные электродвигатели. По сравнению с фазным такой электродвигатель имеет более простую конструкцию, меньшую стоимость, большую надежность в эксплуатации и простоту в обслуживании, несколько более высокие эксплутационные показатели (коэффициент мощности и коэффициент полезного действия), а при автоматическом управлении требует простой аппаратуры. Недостаток короткозамкнутых электродвигателей — относительно большой пусковой ток. При соизмеримости мощностей трансформаторной подстанции и электродвигателя его пуск сопровождается заметным снижением напряжения сети, что усложняет как пуск самого двигателя, так и работу соседних токоприемников.
Наряду с трехфазными асинхронными короткозамкнутыми электродвигателями основного исполнения применяются также отдельные модификации этих двигателей: с повышенным скольжением, многоскоростные, с фазным ротором, с массивным ротором и т. д. Электродвигатели с фазным ротором применяют и в тех случаях, когда мощность питающей сети недостаточна для пуска двигателя с короткозамкнутым ротором.
Механические характеристики асинхронных электродвигателей с короткозамкнутым ротором в значительной мере зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам

Рис. 1. Кривые моментов M = f(S) асинхронных электродвигателей
различают электродвигатели с нормальным ротором (нормальная беличья клетка), с глубоким пазом и с двумя клетками на роторе. Конструкция ротора короткозамкнутых асинхронных электродвигателей общего назначения мощностью свыше 500 Вт предопределяет явление вытеснения тока в обмотке, эквивалентно увеличению ее активного сопротивления. Поэтому, а также вследствие насыщения магнитных путей потоков рассеивания такие электродвигатели (в первую очередь обмотки ротора) обладают переменными параметрами и аналитические выражения их механических характеристик усложняются. Увеличение активного сопротивления ротора в период пуска вызывает увеличение начального пускового момента при некотором снижении силы начального пускового тока (рис. 1).
2. Основные характеристики электродвигателей
Номинальный режим электродвигателя соответствует данным, указанным на его щитке (паспорте). В этом режиме двигатель должен удовлетворять требованиям, установленным ГОСТом.
Существует восемь различных режимов работы, из них основными можно считать:
· продолжительный номинальный режим;
· кратковременный номинальный режим с длительностью рабочего периода 10, 30 и 90 мин;
· повторно-кратковременный номинальный режим с продолжительностью включения (ПВ) 15, 25, 40, 60%, с продолжительностью одного цикла не более 10 мин.
Номинальной мощностью Рн электродвигателя называется указанная на щитке полезная механическая мощность на валу при номинальном режиме работы. Номинальная мощность выражается в Вт или кВт.
Номинальная частота вращения nн вала электродвигателя называется указанное на щитке число оборотов в минуту, соответствующее номинальному режиму.
Номинальный момент вращения — момент, развиваемый двигателем на валу при номинальной мощности и номинальной частоте вращения:

Мн — номинальный момент вращения, Н·м (1 кгс·м = 9,81 Н·м ≈ 10 Н·м);
Рн — номинальная мощность, кВт;
nн — номинальная частота вращения, об/мин.
Номинальный к.п.д. hн электродвигателя — отношение его номинальной
мощности к мощности, потребляемой им из сети при номинальном напряжении:

Рн — номинальная мощность, кВт;
Uн — номинальное (линейное) напряжение, В;
Iн — номинальная сила тока, А;
cosφн — номинальный коэффициент мощности.
Номинальной силой тока электродвигателя называется сила тока, соответствующая номинальному режиму. Действительное значение силы тока при номинальном режиме может отличаться от указанного на щитке электродвигателя в пределах установленных допусков для к.п.д. и коэффициента мощности.
Максимальный вращающий момент электродвигателя — наибольший вращающий момент, развиваемый при рабочем соединении обмоток и постепенном повышении момента сопротивления на валу сверх номинального при условии, что напряжение на зажимах двигателя и частота переменного тока остаются неизменными и равными номинальным значениям.
Начальный пусковой вращающий момент электродвигателя — момент вращения его при неподвижном роторе, номинальных значениях напряжения и частоты переменного тока и рабочем соединении обмоток.
Минимальным вращающим моментом электродвигателя в процессе пуска называется наименьший вращающий момент, развиваемый двигателем при рабочем соединении обмоток и частоте вращения в пределах от нуля до значения, соответствующего максимальному вращающему моменту (напряжение на зажимах двигателя и частота переменного тока должны оставаться неизменными и равными их номинальным значениям).
Номинальная частота вращения вала электродвигателя является следующим за мощностью параметром, от которого в значительной мере зависят конструктивное оформление, габариты, стоимость и экономичность работы электропривода. Наиболее приемлемыми в диапазоне мощностей от 0,6 до 100 кВт являются частоты вращения 3000, 1500 и 1000 об/мин (синхронные). Электродвигатели с частотой вращения 750 об/мин (восьмиполюсные) малых мощностей имеют низкие энергетические показатели. При одинаковой мощности электродвигатели с более высокой частотой вращения имеют более высокие значения к.п.д. и cosφ, а также меньшие размеры и массу, что определяет их меньшую стоимость.
Сила тока холостого хода I0 в значительной мере определяется силой намагничивающего тока I0Р. приближенно можно считать I0 = I0P . Для машин
основного исполнения относительное значение силы тока холостого хода
I0 = (0,2—0,6)Iн (оно тем больше, чем меньше номинальная частота вращения и мощность электродвигателя). Зависимость тока холостого хода от частоты вращения электродвигателя приведена в таблице 2.1.
Таблица 2.1. Токи холостого хода для двигателей основного исполнения
Среднее значение токов холостого хода
(в долях от силы номинального тока) при синхронной частоте вращения, об/мин
Читайте также: