
Принцип действия рлс на судне кратко
Обновлено: 05.07.2024
Радиолокация — средство для обнаружения и определения положения различных объектов при помощи радиоволн. Судовые радиолокационные станции (РЛС) работают на сантиметровых волнах, которые, подобно световым лучам, распространяются прямолинейно и обладают свойствами рефракции, дифракции и интерференции. Дифракция позволяет радиоволнам двигаться по изогнутому пути, следуя кривизне земной поверхности; рефракция увеличивает дальность радиолокационного горизонта до 2,2 hM, где hM—высота антенны радиолокатора в метрах.
Радиоволны сантиметрового диапазона хорошо отражаются от препятствий, встречающихся на пути их распространения. Это позволяет обнаружить объект, измерить направление на него и определить расстояние до него (рис. 65).
Современный радиолокатор позволяет обнаруживать объекты в море на расстоянии более 50 миль. С его помощью можно определять место судна, снос ветром и элементы течения, осуществлять проводку в узкостях, в условиях плохой видимости, уточнять маневренные элементы судна и элементы движения другого судна и т. п.
Судовая радиолокационная станция не связана с береговыми устройствами. Автономность прибора дает ему большие преимущества перед методами определения места судна по визуальным наблюдениям и радиопеленгованием.
Возможность определять с помощью радиолокационной судовой станции расстояния до ориентиров и пеленги на них позволяет использовать для радиолокационных определений места судна все те способы, которые были описаны в гл. VI. Кроме того, благодаря широким возможностям судовых радиолокационных станций, появились и дополнительные способы определений: веер пеленгов и расстояний, способ параллельных расстояний и т. д. Из всех способов определения места судна с помощью судовой радиолокационной станции предпочтение следует отдавать тем, которые основаны на измерении радиолокационных расстояний, так как они обычно измеряются значительно точнее, чем радиолокационные пеленги.
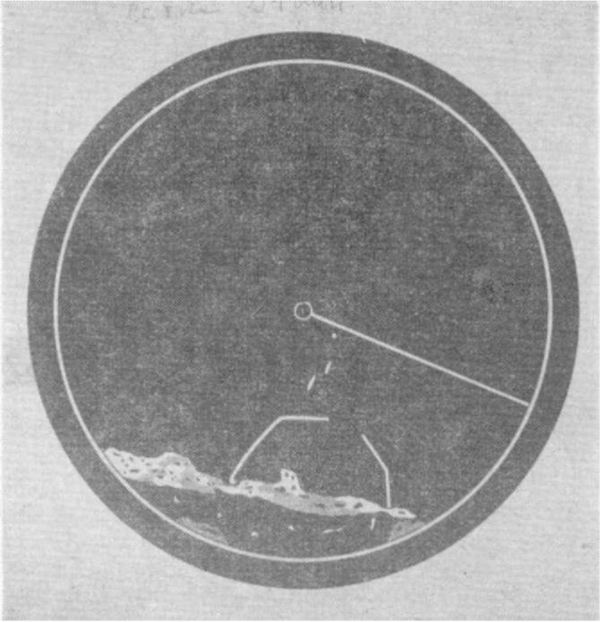
Рис. 65.
Однако имеется немало факторов, ограничивающих использование РЛС или значительно снижающих точность ее показаний. РЛС не всегда может обеспечить безопасность плавания в данной обстановке. Малая ширина берегового фарватера, действие течения, сильное волнение, неблагоприятные гидрометеорологические условия (грозовые облака, ветер, дождь) часто не позволяют полностью использовать РЛС для навигации. Пользуясь радиолокатором, трудно измерять расстояние до участка береговой линии в тех местах, где она вдается в сторону суши; не все объекты доступны для радиолокационного наблюдения. Так, берега, покрытые ледниками с ровной поверхностью, почти совершенно не обнаруживаются на экране. Волна около четырех баллов часто делает невозможным своевременно различить даже такой объект, как встречное судно и т. п. Кроме того, очень вероятны ошибки в опознании наблюдаемого объекта. Статистика столкновений судов в иностранных флотах за несколько последних лет показывает, что после широкого внедрения радиолокационной техники на торговом флоте количество столкновений увеличилось. Это явление— прямое следствие слепого доверия к радиолокационной технике, основанное на неправильной завышенной оценке навигационных возможностей судовых РЛС.
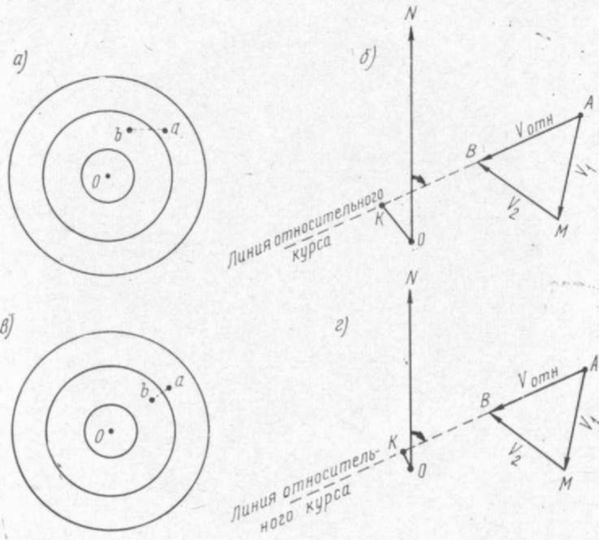
Рис. 66.
Несмотря на это судовая РЛС в условиях плохой видимости имеет исключительно важное значение для предупреждения столкновений судов в море, так как позволяет заблаговременно обнаружить встречное судно, определить наличие опасного сближения и принять меры для его устранения согласно ППСС.
Наиболее просто и быстро такая задача решается при помощи способа относительной прокладки, заключающегося в следующем.
На листе чистой бумаги отмечают точку О (рис. 66, б, г) , принимаемую за место своего судна(1).
На экране РЛС этой точке соответствует центр развертки. Через точку О проводят линию истинного меридиана ONИ.
Обнаружив на экране РЛС эхо-сигнал другого судна (точка а на рис. 66, а, в) , переносят его положение на бумагу с помощью измеренных радиолокационного пеленга и расстояния, получая точку А (рис. 66, б, г) . Через 3—6 мин (0,05—0,10 ч) вновь переносят переместившийся на экране эхо-сигнал (точка Ъ на рис. 66, а) на бумагу, получая точку В (рис. 66, б, г) .
Таким образом, перемещение эхо-сигнала встречного судна по экрану РЛС точно воспроизводится на бумаге. Отрезок АВ представляет собой вектор относительного перемещения судов (0,05— 0,10 длины вектора относительной скорости V0тн). Линия АВ называется линией относительного движения (ЛОЛ) . Опасность столкновения возникает в том случае, когда ЛОД проходит через центр индикатора кругового обзора (ИКО) , т. е. через точку О (или достаточно близко к ней). Такое положение соответствует низменности пеленга на встречное судно (рис. 66,в,г). Треугольник АВМ позволяет определить элементы движения встречного судна, _вектор скорости которого V2 — MB (рис. 66, б, г), если V1=AM — вектор скорости судна наблюдателя.

Важное
Вице-премьер Борисов: возможности выполнить гособоронзаказ 2022 года есть

Важное
СМИ: немецкая MTU отказалась поставлять Китаю дизели для экспортных подлодок

Важное
Радиолокационные станции (РЛС) предназначены для обнаружения местонахождения различ-ных объектов и наблюдения за окружающей надводной обстановкой в условиях плохой видимости.
В РЛС используется явление отражения радиоволн от различных объектов, расположенных на пути их распространения, таким образом, в радиолокации используется явление эха. РЛС содержит передатчик, приемник, антенно-волноводное устройство, индикатор с экраном для визуального наблюдения эхо-сигналов.
Принцип работы РЛС .
Передатчик станции вырабатывает мощные высокочастотные импульсы электромагнитной энергии, которые с помощью антенны посылаются в пространство узким лучом. Отраженные от какого-либо объекта (судна, высокого берега и т. п.) радиоимпульсы возвращаются в виде эхо-сигналов к антенне и поступают в приемник. По направлению узкого радиолокационного луча, который в данный момент отразился от объекта, можно определить пеленг или курсовой угол объекта. Измерив промежуток времени между посылкой импульса и приемом отраженного сигнала, можно получить расстояние до объекта. Так как при работе РЛС антенна вращается, излучаемые импульсные колебания охватывают весь горизонт. Поэтому на экране индикатора судовой РЛС создается изображение окружающей судно обстановки. Принятые эхо-сигналы после преобразования и усиления в приемнике поступают в индикатор, снабженный электронно-лучевой трубкой. Экран электронно-лучевой трубки покрыт особым составом, обладающим свойством послесвечения, поэтому эхо-сигналы, возникающие на экране индикатора, угасают постепенно. Центральная светящаяся точка на экране индикатора РЛС отмечает место судна, а идущая от этой точки светящаяся линия показывает курс. Изображение различных объектов на экране индикатора "может быть ориентировано относительно диаметральной плоскости судна (стабилизация по курсу) или относительно истинного меридиана (стабилизация по норду). Направления на объекты определяются по азимутальному кругу соответственно ориентированного или по курсу, или по норду. В последнем случае азимутальный круг должен быть связан с репитером гирокомпаса. По светящимся на экране индикатора градуированным неподвижным кольцам дальности определяется расстояние до нужного объекта, который изображается светящимся пятном, если это одиночный предмет (судно, маяк), или волнистой линией (береговая черта и т. д.). Для точного измерения расстояния имеется дальномерное устройство с подвижным кругом дальности.
Судовые РЛС позволяют осуществлять плавание в узкостях, расхождение судов и определение места судна по береговым ориентирам или радиолокационным маякам в условиях плохой видимости; за короткий промежуток времени определять курс и скорость встречного судна и избегать таким образом столкновения.
Структурная схема РЛС изображена на Рис.36
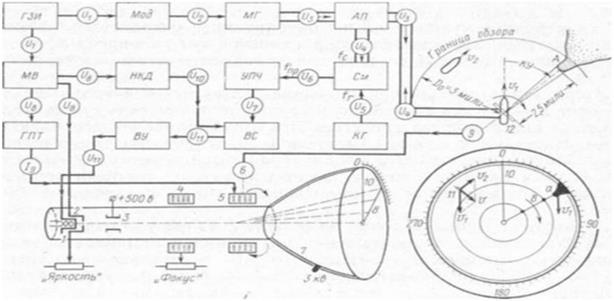
Рис.36. Структурная схема РЛС
Магнетрон генерирует зондирующий импульс мощностью 70—80 квт длиной волны 1=3, 2 см, частотой /с = 9400Мгц. Импульс магнетрона через антенный переключатель (АП) по специальному волноводу подводится к антенне и излучается в пространство узким направленным лучом. Ширина луча в горизонтальной плоскости 1—2°, а вертикальной около 20°. Антенна, вращаясь вокруг вертикальной оси со скоростью 12—30 об/мин, облучает все окружающее судно пространство.
Отраженные сигналы принимаются той же антенной, поэтому АП производит поочередное подключение антенны то к передатчику, то к приемнику. Отраженный импульс через антенный переключатель поступает на смеситель, к которому подключен клистронный генератор (КГ) . Последний генерирует маломощные колебания с частотой f Г=946 0 Мгц.
В смесителе в результате сложения колебаний выделяется промежуточная частота
Погрешности РЛС.
Основными составляющими погрешности измерения направления являются:
- погрешность визирования (зависит от размера отметки, положения ее относительно центра экрана и конструкции визира),носящая случайный характер;
-погрешность системы передачи угла с антенны на индикатор (зависит от типа системы), носящая систематический характер;
- погрешность центровки начала развертки на индикаторе (только для механического визира), имеющая систематический характер;
- погрешность передачи курса от гирокомпаса, имеющая систематический характер.
Погрешность измерения, указанная в паспорте РЛС, соответствует условиям наблюдения объекта на краю экрана (более 2/3 радиуса) при отсутствии качки судна. Учитывая уменьшение точности вблизи центра экрана, рекомендуется выполнять пеленгование при положении отметки объекта на расстоянии больше половины радиуса экрана. При больших значениях качки (бортовой до 12°, килевой до 6°) ошибка пеленгования может увеличиться на 0,5°.
Требования ИМО к РЛС
Ассамблея, принимая во внимание Статью 16 (j) Конвенции о Международной морской организации, касающуюся функций Ассамблеи, принимая во внимание Правило 12 Главы 5 Международной конвенции по охране человеческой жизни на море 1974 г., с учетом уточнений, принимая во внимание Резолюцию А.222(7),- ЗАМЕНЕНА НА А.477(12) касающуюся технико-эксплуатационных параметров РЛС, признавая желательным согласовать такие требования к технико-эксплуатационным параметрам судовых РЛС с технико-эксплуатационными требованиями к САРП (Резолюция А.839(19) принимает Рекомендации по технико-эксплуатационным требованиям к параметрам судовых РЛС, которые указаны в приложении к настоящей Резолюции ТАКОЙ РЕЗОЛЮЦИИ НЕТ
рекомендует Правительствам, чтобы:
технико-эксплуатационные параметры судового радиолокационного оборудования, устанавливаемого с 1 января 1984 г., не уступали параметрам, указанным в приложении к настоящей Резолюции
технико-эксплуатационные параметры судового радиолокационного оборудования, установленного до 1 января 1984 г., по крайней мере удовлетворяли параметрам, указанным в Резолюции А477(12)
Область применения.
1.1.Данные технико-эксплуатационные требования относятся ко всему судовому радиолокационному оборудованию, установленному с 1 января 1984 г. В соответствии с правилом 12 ( в уточненной редакции) Главы 4 Международной конвенции по охране человеческой жизни на море 1974 г.
1.2.РЛС, установленные до 1 января 1984 г., должны по крайней мере удовлетворять технико-эксплуатационным требованиям, рекомендуемым Резолюцией А.222(7). ----На А.477(12)
Назначение.
Радиолокационная станция (РЛС) должна обеспечивать индикацию относительного положения судов, других надводных объектов, буев, береговой черты и навигационных знаков так, чтобы способствовать навигации и предупреждению столкновений.
Требования.
Все РЛС должны соответствовать следующим минимальным требования.
При нормальных условиях распространения, когда антенна РЛС расположена на высоте 15 м над уровнем моря, при отсутствии помех от моря РЛС должна обеспечивать четкую индикацию:
при высоте берега до 60 м на расстоянии 20 миль
при высоте берега до 6 м на расстоянии 7 миль
судов валовой вместимостью 5000 т на расстоянии 7 миль независимо от ракурса
небольшого судна длиной 10 м на расстоянии 3 мили
объектов, аналогичных навигационному бую, имеющих эффективную поверхность рассеивания приблизительно 10 кв.м на расстоянии 2 мили
Параметры РЛС должны быть такими, чтобы при бортовой и килевой качках ±10° характеристики обнаружения удовлетворяли этим требованиям.
Надводные объекты, указанные в п. 3.1.2. настоящих Рекомендаций, должны быть четко видны с минимального расстояния 50 м до расстояния 1 миля при неизменном положении органов управления, кроме переключателя шкал дальности.
3.3.1.Без применения внешних увеличительных устройств индикатор должен обеспечивать отображение относительного движения при ориентации относительно диаметральной плоскости судна без стабилизации на экране с эффективным диаметром не менее чем
180 мм для судов валовой вместимостью от 500 до 1600 т.
250 мм для судов валовой вместимостью от 1600 до 10000 т.
340 мм при наличии на судне одного индикатора и 250 мм в случае установки второго индикатора для судов валовой вместимостью 10000 т и выше.
(Обеспечиваются на ЭЛТ с диаметром 9, 12 и 16 дюймов соответственно)
3.3.2.Индикатор должен предусматривать один из двух наборов шкал дальности:
1.5, 3, 6, 12 и 24 мили и одна шкала с номиналом более 0.5 и менее 0.8 мили либо
1, 2, 4, 8, 16 и 32 мили
Могут быть предусмотрены дополнительные шкалы.
3.3.3.В любое время должна предусматриваться четкая индикация выбранной шкалы дальности и интервала между кольцами дальности.
3.4.1.Для измерения дальности должны быть предусмотрены неподвижные электронные кольца дальности;
Для набора шкал, соответствующих требованию подпункта 3.3.2.1, на шкале с номиналом более 0.5 и менее 0.8 мили должно обеспечиваться, по крайней мере 2 кольца дальности и для каждой из остальных шкал - по 6 колец дальности
Для набора шкал дальности, соответствующих требованию подпункта 3.3.2.2, на каждой шкале должно быть 4 кольца дальности
3.4.2.Подвижный электронный маркер дальности должен иметь цифровой отчет.
3.4.3.Неподвижные кольца дальности и неподвижный маркер дальности должны обеспечивать измерения дальности до объекта с погрешностью, не превышающей 1.5% от максимального значения используемой шкалы или 70 м, в зависимости от того, что больше.
3.4.4.Должна быть предусмотрена возможность изменения яркости подвижных колец дальности и неподвижного маркера дальности до полного снятия с экрана.
3.5.1.Курс судна должен указываться на экране с максимальной погрешностью не более ±1є. Ширина линии отметки курса должна быть не более 0.5є.
3.5.2.Должны быть приняты меры для выключения отметки курса с помощью переключателя, который не может оставаться постоянно в положении .
3.6.1.Должны быть приняты меры для быстрого измерения направления на любой объект, отметка которого появляется на экране.
3.6.2.Средства, предусмотренные для измерения направлений, должны обеспечивать измерение направления на объект, отметка которого расположена на краю экрана, с погрешностью, не превышающей ± 1°.
3.7.1.Индикатор должен обеспечивать на шкале дальности 2 мили или менее раздельное отображение двух одинаковых целей малого размера на расстояниях, равных 50 - 100 % от номинала используемой шкалы дальности и находящихся на одном направлении, если расстояние между целями не менее 50 м.
3.7.2.Индикатор должен обеспечивать раздельное отображение двух одинаковых целей малого размера, находящихся на одном расстоянии между 50 и 100 % от номинала шкалы или мили и их угловом положении, различающемся 2.5°.
Должно быть предусмотрено непрерывное и автоматическое вращение антенны почасовой стрелки в пределах 360° по азимуту. Частота вращения антенны должна быть не менее 12 об/мин.
3.9.Антенна должна быть работоспособна при относительной скорости ветра до 100уз. Должны быть приняты меры для возможности азимутальной стабилизации РЛС от гирокомпаса, для чего в РЛС должен быть предусмотрен соответствующий вход.
3.9.1.Погрешность согласования с гирокомпасом должна быть в пределах 0.5° при скорости вращения датчика гирокомпаса 2 об/мин.
3.9.2.РЛС должна работать удовлетворительно при ориентации изображения по курсу без стабилизации изображения, когда связь с гирокомпасом отсутствует.
Должны быть предусмотрены средства для быстрого определения во время работы станции значительного ухудшения ее работоспособности относительно калиброванного значения, принятого при установке РЛС, а также для правильной настройки в случае отсутствия целей.
3.11.Устройства для защиты от помех.
Должны быть предусмотрены средства для подавления нежелательных отражений от моря, дождя и других осадков, облаков и самумов (песчаных бурь). Должна быть предусмотрена возможность ручной плавной регулировки органов управления средств помехозащиты. Орган управления в крайнем положении против часовой стрелки должен отключаться. Могут быть предусмотрены дополнительные автоматические органы помехозащиты, однако должна быть возможность их отключения.
3.12.1.Должно быть предусмотрено включение станции и управление ею с индикатора.
3.12.2.Рабочие органы управления должны быть доступны, легко различимы и удобны в эксплуатации. Если используются символы, то они должны выполнятся в соответствии с Рекомендациями ИМО для органов управления морского навигационного радиолокационного оборудования.
3.12.3.РЛС должна быть полностью в рабочем состоянии в течении 4 минут после ее включения. На современных РЛС картинка появляется через 6 сек. после включения станции.
3.12.4.Должно быть предусмотрено положение предварительной готовности, из которого станция может быть приведена полностью в рабочее состояние за 15 сек.
3.13.Стабилизация относительно воды и грунта (индикатор истинного движения).
3.13.1.При использовании стабилизации изображения относительно воды или грунта точность и разрешающая способность должны быть по крайней мере равными требованиям настоящих Рекомендаций.
3.13.2.Перемещение начала развертки, кроме индикаторов с ручным возвратом, должно ограничиваться кругом радиусом не более 75 % от радиуса экрана.
Антенна должна быть установлена таким образом, чтобы существенно не ухудшалась эффективность РЛС.
3.15.Работа с радиолокационными маяками.
3.15.1.Все РЛС, работающие в диапазоне 3 см, должны работать горизонтально поляризованным излучением.
3.15.2.Должна быть предусмотрена возможность выключения устройства обработки сигналов, которые могут исключить изображение сигналов маяка на экране РЛС.
Установка нескольких РЛС.
4.1.На судах, где требуется установка двух РЛС, они должны быть размещены таким образом, чтобы каждая РЛС могла работать самостоятельно и обе могли работать одновременно независимо друг от друга. Каждая РЛС должна иметь возможность подключения к аварийному источнику питания, если такой предусмотрен в соответствии с требованиями Правил 1 Главы 11 Конвенции СОЛАС-74.
4.2.При установке двух РЛС может быть предусмотрено устройство взаимного переключения приборов для повышения гибкости и готовности радиолокационной установки. Оно должно быть установлено так, чтобы неисправность любой РЛС не вызывало отключения электропитания или другого нарушения в работе РЛС.
Все РЛС должны удовлетворять вышеперечисленным требованиям для обеспечения безопасности мореплавания, в противном случае не допускается установка и эксплуатация таких станций.
"Радиолокационная станция", или "радар", происходят от англ. словосочетания radio detection and ranging — радиообнаружение и дальнометрия.
Радиолокационная станция (или сокращенно РЛС) — это устройство, измеряющее время отражения излученного импульса от объекта и пеленг этого объекта относительно своего местоположения. Никакой другой судовой навигационный прибор, кроме РЛС, не способен предоставить такую же информацию об объектах, находящихся вокруг судна, а это значит, что РЛС представляет собой важное средство обеспечения безопасности судоходства.
Использование радиолокационных станций
Первая радиолокационная станция была разработана во время Второй мировой войны. Сегодня на рынке представлены РЛС, подходящие для использования на всех типах судов, включая и небольшие рыболовецкие, и прогулочные суда. Несмотря на то, что среди владельцев маломерных судов популярностью пользуются и такие судовые устройства, как навигационные эхолоты и GPS-приемники, радиолокационная станция остается одним из наиболее важных навигационных средств. Именно она способна обеспечить безопасность навигации в полной темноте или в тумане.

Возьмем, например, прокладчик курса. Он может показать только приблизительное местонахождение объекта, в то время как радиолокационная станция точно покажет, где находятся те или иные объекты, в том числе береговая линия, движущиеся суда, маяки и буи. РЛС решит проблему и в случае, когда объекты не нанесены на карту: судоводитель будет предупрежден о возможном препятствии на его пути.
Назначение РЛС

Главная функция любой радиолокационной станции — предупреждение столкновений. Также она обеспечивает информированность судоводителя о местонахождении судов, берега и других объектов. Среди остальных функций РЛС можно выделить следующие:
- Судовождение в любых условиях освещенности
В полной темноте и в условиях ограниченной видимости радиолокационная станция может стать "глазами" судоводителя, что позволит ему контролировать движение собственного судна и других судов, а также расположение различных объектов, которые могут встретиться на пути судна. - Анализ движения других судов
Функция отображения следов в виде послесвечения позволяет оценить движение всех целей относительно собственного судна. Некоторые современные модели радиолокационных станций также могут отображать истинное движение целей, что еще больше повышает безопасность судоходства. К таким РЛС относится, например, радиолокационная станция Furuno FR-7062. - Ведение судна в определенное судоводителем место
Владельцы небольших судов (рыболовных и прогулочных) используют радиолокационные станции также для того, чтобы добраться в определенные районы, например, к излюбленному месту рыбной ловли. Напоминающее карту изображение на экране РЛС позволяет идти непосредственно к выбранной путевой точке и дополняет изображения прокладчика курса. - Прием сигналов радиолокационного маяка
Радиолокационная станция может принимать импульсные сигналы от радиолокационного маяка для определения местоположения своего судна.
Как работает радиолокационная станция
Антенна излучает радиоимпульсы в определенном направлении. Когда импульс наталкивается на какой-либо объект, например, судно или остров, часть энергии импульса возвращается к антенне. Направление, в котором повернута антенна при получении отраженного сигнала, является направлением цели, давшей такое отражение. Так как радиоволны распространяются практически с постоянной скоростью, время, требующееся для возвращения отраженного сигнала к антенне, является мерой дальности цели.
Как РЛС определяет расстояние
Радиоимпульс проходит в прямом и обратном направлении, но для определения расстояния до цели требуется только половина времени его пути. Следующее уравнение показывает, как определяется расстояние:
где c — скорость радиоимпульса (3 x 108 м/с)
T — время между передачей радиоимпульса и приемом отраженного эхосигнала
D — расстояние
Как радиоволны, так и световые волны распространяются практически с постоянной скоростью, равной 300000 км/с (186000 миль/с); поэтому РЛС может обрабатывать огромные объемы информации за очень короткое время. Для сравнения, гидролокатор и эхолот используют при работе ультразвуковые волны. Так как скорость распространения ультразвуковых волн составляет 2420 км/с (1500 миль/с), обработка сигнала осуществляется гораздо медленнее, чем в случае РЛС.
Как РЛС определяет пеленг
РЛС определяет расстояние до цели путем измерения количества времени, которое требуется для возвращения отраженного эхосигнала к антенне. Пеленг на цель определяется по направлению, из которого возвращается отраженный эхосигнал.
Антенна поворачивается на 360° вокруг своей вертикальной оси с использованием специального механизма. Чтобы добиться высокой разрешающей способности по пеленгу, антенна передает радиочастотные (РЧ) импульсы в форме узконаправленного луча. "Суперлучи" имеют ширину в горизонтальной плоскости порядка 1 (одного) градуса и меньше, обеспечивая высокую точность определения пеленга. Чем меньше ширина луча, тем точнее можно определить пеленг на цель.
Как РЛС отображает цели
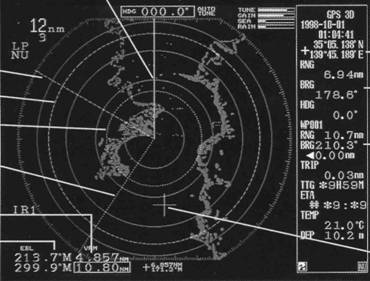
Радиолокационные цели отображаются на так называемом индикаторе кругового обзора (ИКО). По сути, это диаграмма направленности антенны в полярных координатах, в середине которой расположено передающее импульсы судно. Эхосигналы от целей принимаются и отображаются в направлении, соответствующем относительному пеленгу, на расстоянии от центра ИКО, соответствующем их удалению от своего судна. Ранние модели РЛС отображали цели, а также лишь некоторые графические данные, например, курсовую черту и кольца дальности. Чтобы увидеть изображение на экране, нужен был специальный козырек для защиты от световых помех.
Почти все более поздние модели РЛС используют ЖК-дисплеи или мониторы с электронно-лучевой трубкой (ЭЛТ). Дисплеи такого типа обеспечивают стабильное, яркое, нетемнеющее отображение радиолокационных эхосигналов на монохромном или цветном экране в зависимости от модели. Изображение хорошо видно даже при ярком солнечном свете. На экране отображается различная информация в цифровом формате, чтобы пользователь всегда имел полное представление об окружающей навигационной обстановке.
Дальность действия РЛС
Атмосферные условия и форма цели, материал и ракурс в небольшой степени влияют на дальность действия РЛС. Тем не менее в общем случае дальность действия РЛС вычисляется по следующей формуле:
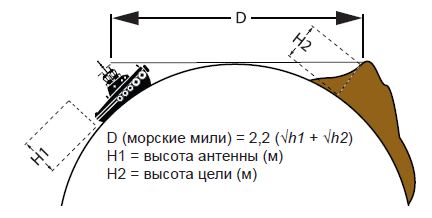
D – расстояние от антенны до горизонта цели. При нормальных атмосферных условиях это расстояние на 6% больше, чем оптический горизонт. Это вызвано тем, что радиоволны преломляются вследствие атмосферных изменений.
Чем выше антенна или цель расположены над поверхностью моря, тем больше дальность обнаружения цели. Например, если антенна расположена на высоте 9 м над уровнем моря, а высота цели 16 м, на экране прибора можно будет увидеть эхосигнал от этой цели на расстоянии 15 миль.
Аномальные условия распространения радиоимпульсов
При определенных атмосферных условиях могут образоваться воздушные каналы, которые влияют на распространение радиоимпульсов и, в свою очередь, на дальность действия РЛС. Если радиоимпульсы отклоняются вниз, они могут пройти большее расстояние, таким образом увеличивая дальность обнаружения целей. Это явление называется сверхрефракция. Противоположное явление, когда радиоволны отклоняются вверх и уменьшается дальность обнаружения целей, называется субрефракция.

Все суда должны обеспечивать радиолокационную прокладку на экране РЛС, для этого их оборудуют системой автоматической радиолокационной прокладки (САРП). САРП выполняет обработку радиолокационной информации и позволяет производить (рис. 3.11):
— ручной и автоматический захват целей и их сопровождение;
— отображение на экране индикатора векторов относительного или истинного перемещения целей;
— выделение опасно сближающихся целей;
— индикацию на табло параметров движения и элементов сближения целей;
— проигрывание маневра курсом и скоростью для безопасного расхождения;
— автоматизированное решение навигационных задач;
— отображение элементов содержания навигационных карт;
— определение координат местоположения судна на основе радиолокационных измерений.
Автоматическая информационная система (АИС) является морской навигационной системой, использующей взаимный обмен между судами, а также между судном и береговой службой для передачи информации о позывном и наименовании судна для его опознавания, координатах, сведений о судне (размеры, груз, осадка и др.) и его рейсе, параметрах движения (курс, скорость и др.) с целью решения задач по предупреждению столкновений судов, контроля за соблюдением режима плавания и мониторинга судов в море.

Электронные картографические навигационные информационные системы (ЭКНИС) являются эффективным средством навигации, существенно сокращающим нагрузку на вахтенного помощника и позволяющим уделять максимум времени наблюдению за окружающей обстановкой и выработке обоснованных решений по управлению судном (рис. 3.12).
Основные возможности и свойства ЭКНИС:
– проведение предварительной прокладки;
– проверка маршрута на безопасность;
– ведение исполнительной прокладки;
– автоматическое управление судном;
– отображение "опасной изобаты " и "опасной глубины";
– запись информации в электронный журнал с возможностью дальнейшего проигрывания;
– ручная и автоматическая (через Internet) корректура;
– подача сигнала тревоги при приближении к заданной изобате или глубине;
– дневная, ночная, утренняя и сумеречная палитры;
– электронная линейка и неподвижные метки;
– базовая, стандартная и полная нагрузка дисплея;
– обширная и дополняемая база морских объектов;
– база приливов более чем в 3000 точек Мирового Океана.

Спутниковая система навигации – это система, состоящая из наземного и космического оборудования, предназначенная для определения местоположения (географических координат), а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов (рис. 3.13).
GPS – это глобальная навигационная спутниковая система определения местоположения Global Position System. Система включает группировку низкоорбитальных навигационных спутников, наземные средства слежения и управления и самые разнообразные, служащие для определения координат. Принцип определения своего места на земной поверхности в глобальной системе позиционирования
заключается в одновременном измерении расстояния до нескольких навигационных спутников (не менее трёх) – с известными параметрами их орбит на каждый момент времени, и вычислении по изменённым расстояниям своих координат.
Читайте также:
- Раскраски для детей на тему весна в детском саду
- Питирим сорокин философия кратко
- Метод циркулярного интервью был разработан в следующей школе системной семейной психотерапии
- Календарно тематическое планирование лего конструирование и робототехника в доу
- Задачи воспитания детей в вальдорфской педагогике кратко