
Принцип действия бесколлекторных машин переменного тока кратко
Обновлено: 05.07.2024
Синхронные машины – это бесколлекторные машины переменного тока, имеющие синхронную частоту вращения ротора, т. е. у них частота вращения ротора равна частоте вращения магнитного поля статора. В промышленности и на железнодорожном транспорте синхронные машины используют в основном как генераторы; их устанавливают на мощных тепловых, гидравлических и атомных электростанциях, а также на тепловозах, автомобилях, самолётах. В первом случае мощностью до 1200 МВт, во втором – до 4400 кВт. В зависимости от типа привода различают турбогенераторы, гидрогенераторы и дизель-генераторы. Синхронные машины также используются и в качестве электродвигателей при мощности 100 кВт и выше для приводов насосов, компрессоров, вентиляторов и других механизмов.
Работа синхронной машины основана на явлении электромагнитной индукции и заключается в преобразовании механической энергии в электрическую энергию переменного тока (генераторы) или электрической энергии переменного тока в механическую (двигатели), т. е. синхронная машина обладает обратимостью.
Синхронная машина состоит из неподвижной части – статора, в пазах которого расположена многофазная (как правило, трёхфазная) обмотка и вращающейся части – ротора с обмоткой возбуждения, питаемой от источника постоянного тока (возбудителя) через контактные кольца и щётки. Синхронная машина может работать автономно в качестве генератора, питающего подключенную к ней нагрузку, или параллельно с сетью, к которой присоединены другие генераторы. При работе параллельно с сетью она может отдавать или потреблять электрическую энергию, т. е. работать генератором или двигателем. При подключении обмотки статора к сети с напряжением U1 и частотой f1 проходящий по обмотке ток создаёт вращающееся магнитное поле, частота вращения которого
n1 = 60×f1/p.
В результате взаимодействия этого поля с током возбуждения Iв, проходящим по обмотке ротора, создаётся электромагнитный момент М, который при работе машины в двигательном режиме является вращающим, а при работе в генераторном режиме – тормозным. В установившемся режиме ротор неподвижен относительно магнитного поля и вращается с частотой вращения n1 = n2, где n2 - частота вращения ротора. Таким образом, в установившемся режиме ротор машины постоянного тока вращается с постоянной частотой, равной частоте вращающегося магнитного поля.
В синхронных машинах применяют две различные конструкции ротора: явнополюсную – с явновыраженными полюсами (обмотка возбуждения выполнена в виде прямоугольных катушек размещённых на полюсах и закреплённых полюсными наконечниками) и неявнополюсную – с неявновыраженными полюсами (обмотка возбуждения расположена в пазах, выфрезерованных на цилиндрической поверхности ротора и укреплена металлическими клиньями) (рис. 35).
Рис. 35. Ротор синхронных неявнополюсной (а) и явнополюсной (б) машин: 1 – сердечник ротора; 2 – обмотка возбуждения.
Явнополюсную конструкцию применяют в сравнительно тихоходных машинах, приводимых во вращение от дизеля или гидравлических турбин. У явнополюсных машин в специальных пазах полюсных наконечников укладывают успокоительную (демпферную) обмотку. Неявнополюсную конструкцию применяют в быстроходных машинах, приводимых во вращение от паровых или газовых турбин.
В маломощных машинах в ряде случаев возникают затруднения с размещением обмотки возбуждения на роторе и тогда её размещают на статоре, а обмотку, с которой снимают напряжение (трёхфазную или однофазную) располагают на роторе.
Тяговые генераторы на подвижном составе выполняют явнополюсными с горизонтальным валом, сочленённым с коленчатым валом дизеля. На тепловозах с системой переменно-постоянного тока синхронные генераторы работают на выпрямительных установках, питающих тяговые двигатели постоянного тока. Для уменьшения пульсаций используют 12-ти пульсовую систему выпрямления тока. Тяговые синхронные генераторы превосходят генераторы постоянного тока по массогабаритам в 1,5 раза и кроме того вес выпрямительной установки составляет 650 кг, что примерно в 2 раза больше, чем у генераторов постоянного тока.
Синхронные машины – это бесколлекторные машины переменного тока, имеющие синхронную частоту вращения ротора, т. е. у них частота вращения ротора равна частоте вращения магнитного поля статора. В промышленности и на железнодорожном транспорте синхронные машины используют в основном как генераторы; их устанавливают на мощных тепловых, гидравлических и атомных электростанциях, а также на тепловозах, автомобилях, самолётах. В первом случае мощностью до 1200 МВт, во втором – до 4400 кВт. В зависимости от типа привода различают турбогенераторы, гидрогенераторы и дизель-генераторы. Синхронные машины также используются и в качестве электродвигателей при мощности 100 кВт и выше для приводов насосов, компрессоров, вентиляторов и других механизмов.

Работа синхронной машины основана на явлении электромагнитной индукции и заключается в преобразовании механической энергии в электрическую энергию переменного тока (генераторы) или электрической энергии переменного тока в механическую (двигатели), т. е. синхронная машина обладает обратимостью.
Синхронная машина состоит из неподвижной части – статора, в пазах которого расположена многофазная (как правило, трёхфазная) обмотка и вращающейся части – ротора с обмоткой возбуждения, питаемой от источника постоянного тока (возбудителя) через контактные кольца и щётки. Синхронная машина может работать автономно в качестве генератора, питающего подключенную к ней нагрузку, или параллельно с сетью, к которой присоединены другие генераторы. При работе параллельно с сетью она может отдавать или потреблять электрическую энергию, т. е. работать генератором или двигателем. При подключении обмотки статора к сети с напряжением U1 и частотой f1 проходящий по обмотке ток создаёт вращающееся магнитное поле, частота вращения которого
n1 = 60×f1/p.
В результате взаимодействия этого поля с током возбуждения Iв, проходящим по обмотке ротора, создаётся электромагнитный момент М, который при работе машины в двигательном режиме является вращающим, а при работе в генераторном режиме – тормозным. В установившемся режиме ротор неподвижен относительно магнитного поля и вращается с частотой вращения n1 = n2, где n2 - частота вращения ротора. Таким образом, в установившемся режиме ротор машины постоянного тока вращается с постоянной частотой, равной частоте вращающегося магнитного поля.
В синхронных машинах применяют две различные конструкции ротора: явнополюсную – с явновыраженными полюсами (обмотка возбуждения выполнена в виде прямоугольных катушек размещённых на полюсах и закреплённых полюсными наконечниками) и неявнополюсную – с неявновыраженными полюсами (обмотка возбуждения расположена в пазах, выфрезерованных на цилиндрической поверхности ротора и укреплена металлическими клиньями) (рис. 35).
Рис. 35. Ротор синхронных неявнополюсной (а) и явнополюсной (б) машин: 1 – сердечник ротора; 2 – обмотка возбуждения.
Явнополюсную конструкцию применяют в сравнительно тихоходных машинах, приводимых во вращение от дизеля или гидравлических турбин. У явнополюсных машин в специальных пазах полюсных наконечников укладывают успокоительную (демпферную) обмотку. Неявнополюсную конструкцию применяют в быстроходных машинах, приводимых во вращение от паровых или газовых турбин.
В маломощных машинах в ряде случаев возникают затруднения с размещением обмотки возбуждения на роторе и тогда её размещают на статоре, а обмотку, с которой снимают напряжение (трёхфазную или однофазную) располагают на роторе.
Тяговые генераторы на подвижном составе выполняют явнополюсными с горизонтальным валом, сочленённым с коленчатым валом дизеля. На тепловозах с системой переменно-постоянного тока синхронные генераторы работают на выпрямительных установках, питающих тяговые двигатели постоянного тока. Для уменьшения пульсаций используют 12-ти пульсовую систему выпрямления тока. Тяговые синхронные генераторы превосходят генераторы постоянного тока по массогабаритам в 1,5 раза и кроме того вес выпрямительной установки составляет 650 кг, что примерно в 2 раза больше, чем у генераторов постоянного тока.
Синхронный электродвигатель, принцип действия которого основан на частотном регулировании и самосинхронизации получил название бесколлекторного двигателя. В данной конструкции, вектор магнитного поля статора управляется относительно положения ротора. Бесколлекторный двигатель был создан для того, чтобы улучшить свойства стандартных коллекторных электродвигателей постоянного тока. Он органично соединил в себе самые лучшие качества двигателей постоянного тока и бесконтактных электродвигателей.
Основные отличия от обычных двигателей
Бесколлекторный двигатель нередко используются в радиоуправляемых моделях летательных аппаратов. Их выдающиеся характеристики и живучесть получили широкую популярность, благодаря отсутствию трущихся деталей в виде щеток, которые осуществляют передачу тока.

Для того, чтобы более полно представить разницу, нужно вспомнить, что в стандартном коллекторном электродвигателе происходит вращение ротора с обмотками внутри статора, основой которого служат постоянные магниты. Коммутация обмоток производится с помощью коллектора, в зависимости от положения ротора. В электродвигателе переменного тока, наоборот, ротор с магнитом вращается внутри статора с обмотками. Примерно такую же конструкцию имеет асинхронный двигатель.
В отличие от стандартных двигателей, в бесколлекторном в качестве подвижной части выступает статор, в котором размещены постоянные магниты, а роль неподвижной части играет ротор с трехфазными обмотками.
Принцип работы бесколлекторного электродвигателя
Вращение двигателя осуществляется путем смены направления магнитного поля в обмотках ротора в определенной последовательности. В этом случае, постоянные магниты взаимодействуют с магнитными полями ротора и приводят в движение подвижный статор. В основе этого движения лежит основное свойство магнитов, когда одноименные полюса отталкиваются, а разноименные – притягиваются.
Управление магнитными полями в обмотках ротора и их сменой, происходит с помощью контроллера. Он представляет собой достаточно сложное устройство, способное коммутировать высокие токи с большой скоростью. Контроллер обязательно имеет в своей схеме бесколлекторный электродвигатель, что в значительной степени удорожает его использование.
В бесколлекторных электродвигателях отсутствуют какие-либо вращающиеся контакты и любые контакты, способные переключаться. В этом состоит их главное преимущество перед обычными электродвигателями, поскольку все потери от трения сведены к минимуму.
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.

Рис. 2. Устройство бесколлекторного двигателя
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).

Рис. 3. Конструкция с внешним якорем (outrunner)
Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).

Бесколлекторный двигатель в компьютерном дисководе
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.

Фазы работы бесколлекторного привода
Как видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.

Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.

Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Собирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).

Рисунок 7. Диаграммы напряжений БД
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.

Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Электрические машины переменного тока
Электрические машины служат для превращения механической энергии в электрическую (генераторы переменного и постоянного тока) и для обратного превращения (электродвигатели).
Во всех указанных случаях используются в сущности три основных открытия в области электромагнетизма: явление механического взаимодействия токов, открытое Ампером в 1821 г., явление электромагнитной индукции, открытое Фарадеем в 1831 г., и теоретическое обобщение этих явлений, сделанное Ленцем (1834 г.) в его известном законе о направлении индукционного тока (по существу закон Ленца предвосхитил закон сохранения энергии для электромагнитных процессов).

Для преобразования механической энергии в электрическую или обратно необходимо создать относительное движение проводящего контура с током и магнитного поля (магнита или тока).
В электрических машинах, рассчитанных на длительную работу, используется вращательное движение подвижной части машины (ротор машины переменного тока), расположенной внутри неподвижной части (статора). Обмотка машины, служащая для создания магнитного поля, называется индуктором, а обмотка, обтекаемая рабочим током, называется якорем. Оба последних термина употребляются и для машин постоянного тока.
Для увеличения магнитной индукции обмотки машин размещаются на ферромагнитных телах (сталь, чугун).
Все электрические машины обладают свойством обратимости, т. е. могут использоваться как в качестве генераторов электрической энергии, так и в качестве электродвигателей.

Асинхронные двигатели
В асинхронных двигателях используется одно из проявлений электромагнитной индукции. В курсах физики оно демонстрируется следующим образом:
Под медным диском, способным вращаться вокруг вертикальной оси, проходящей через его центр, помещается вертикальный подковообразный магнит, приводимый во вращение вокруг той же оси (механическое взаимодействие диска и магнита исключено). При этом диск приходит во вращение в ту же сторону, что и магнит, но с меньшей скоростью. Если увеличить механическую нагрузку на диск (например, увеличив трение оси о подпятник), то скорость его вращения уменьшается.
Физический смысл этого явления легко объясняется теорией электромагнитной индукции: при вращении магнита создается вращающееся магнитное поле, наводящее в диске вихревые токи величина последних зависит при прочих равных условиях от относительной скорости поля и диска.
Согласно закону Ленца диск должен прийти во вращение в направлении поля. При отсутствии трения диск должен приобрести угловую скорость, равную скорости магнита, тогда ЭДС индукции исчезнет. В реальных условиях трение неизбежно присутствует, и диск приобретает меньшую скорость. Ее величина зависит от механического тормозящего момента, испытываемого диском.
Несовпадение скорости вращения диска (ротора) со скоростью вращения магнитного поля отражено в названии двигателей.
Принцип действия асинхронных двигателей:
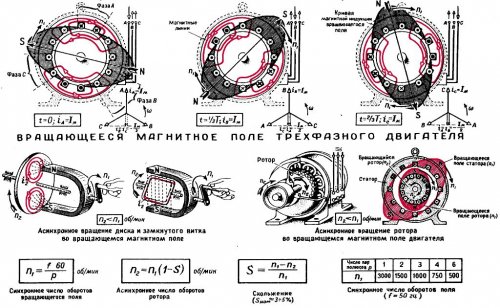
В технических асинхронных двигателях (чаще всего трехфазных) вращающееся магнитное поле создается многофазным током, обтекающим обмотку неподвижного статора. При частоте трехфазного тока f и числе катушек статора 3 р вращающееся поле делает n = f/p об/сек.

В полости статора располагается способный вращаться ротор. С его валом можно соединить механизм, приводимый во вращение. В простейших "короткозамкнутых" двигателях ротор состоит из системы продольных металлических стержней, помещаемых в пазы стального цилиндрического тела. Провода соединены накоротко двумя кольцами. Для увеличения вращательного момента радиус ротора делается достаточно большим.

В других конструкциях двигателей (обычно — это двигатели большой мощности) проводники ротора образуют разомкнутую трехфазную обмотку. Концы катушек замкнуты накоротко в самом роторе, а начала выведены к трем контактным кольцам, насаженным на вал ротора и изолированным от него.
К этим кольцам при помощи скользящих контактов (щеток) присоединен трехфазный реостат, который служит для пуска двигателя в ход. После того как двигатель раскрутится, реостат полностью выводят, и ротор превращается в короткозамкнутый (смотрите - Асинхронные двигатели с фазным ротором).

На теле статора имеется доска для зажимов. К ним выводятся обмотки статора. Они могут быть включены звездой, либо треугольником, в зависимости от напряжения сети: в первом случае линейное напряжение может быть в 1,73 раз больше, чем во втором.
Величина характеризующая относительное запаздывание ротора по сравнению с полем статора у асинхронного двигателя, называется скольжением. Она изменяется от 100% (в момент пуска двигателя) до нуля (идеальный случай движения ротора без потерь).
Перемена направления вращения асинхронного двигателя достигается взаимным переключением каких-либо двух линейных проводов электрической сети, питающей двигатель.

Короткозамкнутые двигатели широко применяются в промышленности. Достоинствами асинхронных двигателей являются простота конструкции и отсутствие скользящих контактов.
Основным недостатком таких двигателей до последнего времени считалась трудность регулировки числа оборотов, т.к. если для этого изменять напряжение цепи статора, то резко меняется вращающий момент, изменять же частоту питающего тока было технически затруднительно. В настоящее время для регулирования частоты питающего тока для изменения частоты вращения двигатели нашли широкое распространение современные микропроцессорные устройства - частотные преобразователи.
Генераторы переменного тока
Генераторы переменного тока строятся на значительные мощности и высокие напряжения. Как и асинхронные машины, они имеют две обмотки. Обычно обмотка якоря располагается в теле статора. Индукторы, создающие первичный магнитный поток, монтируются на роторе и питаются от возбудителя - небольшого генератора постоянного тока, смонтированного на валу ротора. В мощных машинах возбуждение иногда создается выпрямленным переменным напряжением.
Благодаря неподвижности обмотки якоря отпадают технические затруднения, связанные с использованием скользящих контактов при больших мощностях.
На рисунке ниже схематически изображен однофазный генератор. Его ротор имеет восемь полюсов. На них намотаны катушки (не показанные на рисунке), питаемые от постороннего источника постоянным током, подводимым к контактным кольцам, укрепленным на валу ротора. Полюсные катушки намотаны таким образом, что знаки полюсов, обращенных к статору, чередуются. Число полюсов обязательно четное.

В теле статора размещена обмотка якоря. Ее длинные рабочие "активные" проводники, перпендикулярные к плоскости чертежа, показаны на рисунке кружками, они пересекаются линиями магнитной индукции при вращении ротора.
В кружках указано мгновенное распределение направлений индуцированных электрических полей. Соединительные провода, идущие по передней стороне статора, показаны сплошными линиями, а по задней стороне — пунктиром. Зажимы К служат для присоединения внешней цепи к обмотке статора. Направление вращения ротора указано стрелкой.
Если мысленно разрезать машину по радиусу, проходящему между зажимами К, и развернуть на плоскость, то взаимное расположение обмотки статора и полюсов ротора (сбоку и в плане) изобразится схематическим рисунком:

Рассматривая рисунок, убеждаемся, что все активные проводники (проходящие над полюсами индуктора) соединены друг с другом последовательно, причем индуцируемые в них ЭДС суммируются. Фазы всех ЭДС, очевидно, получаются одинаковыми. За время одного полного оборота ротора в каждом из проводников (и, следовательно, во внешней цепи) получится четыре полных периода изменения тока.
Если электрическая машина имеет p пар полюсов и ротор вращается, совершая n оборотов в секунду, то частота получаемого от машины переменного тока равна f = pn гц.
Так как частота ЭДС в сети должна быть неизменна, то скорость вращения роторов должна быть постоянна. Для получения ЭДС технической частоты (50 гц) можно использовать сравнительно медленное вращение, если число полюсов ротора достаточно велико.
Для получения трехфазного тока в теле статора располагают три отдельные обмотки. Каждая из них смещена относительно двух других на одну треть дугового расстояния между соседними (разноименными) полюсами индукторов.

Легко убедиться, что при вращении индукторов в обмотках индуцируются ЭДС, сдвинутые по фазе (во времени) на 120°. Концы обмоток выводятся из машины и могут соединяться звездой или треугольником.
В генераторе относительная скорость поля и провода определяется диаметром ротора, числом оборотов ротора в секунду и числом пар полюсов.

Если генератор приводится во вращение током воды (гидрогенератор), то обычно он делается тихоходным. Для получения нужной частоты тока приходится увеличивать число полюсов, что в свою очередь требует увеличения диаметра ротора.
По ряду технических соображений мощные гидрогенераторы имеют обычно вертикальный вал и располагаются над гидротурбиной, приводящей их во вращение.

Генераторы, движимые паровыми турбинами - турбогенераторы, обычно быстроходны. Для уменьшения механических усилий они имеют малые диаметры и соответственно небольшое число полюсов. Ряд технических соображений заставляет делать турбогенераторы с горизонтальным валом.
Если генератор приводится во вращение двигателем внутреннего сгорания, то его называют дизель-генератором, так как в качестве двигателей обычно применяют дизели, потребляющие более дешевое топливо.

Обратимость генераторов, синхронные двигатели
Если к обмотке статора генератора приключить переменное напряжение от внешнего источника, то возникнет взаимодействие полюсов индуктора с магнитным полем тока, создавшегося в статоре, причем на все полюсы будут действовать вращающие моменты одного и того же направления.
Если ротор вращается с такой скоростью, что как раз через половину периода переменного тока под рассматриваемый проводник обмотки статора подойдет следующий полюс индуктора (противоположный по знаку первому полюсу), то знак силы взаимодействия между ним и током, изменившим свое направление, останется прежним.
При этих условиях ротор, находясь под непрерывным воздействием вращающего момента, будет продолжать свое движение и сможет приводить в действие какой-либо механизм. Преодоление сопротивлений движению ротора будет происходить за счет энергии, потребляемой из сети, и генератор превратится в электродвигатель.

Следует отметить, однако, что непрерывное движение возможно лишь при строго определенной скорости вращения, так как при отклонении от нее на каждый из полюсов ротора, перемещающийся между двумя проводниками статора, часть времени будет действовать ускоряющий вращающий момент, часть же времени — тормозящий.
Таким образом, скорость вращения двигателя должна быть строго определенной,— время, в течение которого полюс заменяется следующим, должно совпадать с полупериодом тока, поэтому подобные двигатели и называются синхронными.
Если переменное напряжение подается в обмотку статора при неподвижном роторе, то, хотя все полюсы ротора в течение первого полупериода тока и испытывают действие вращающих моментов одного и тою же знака, все же вследствие инерции ротор не успеет сдвинуться с места. В следующий полупериод знак вращающих моментов для всех полюсов ротора изменится на обратный.
В результате ротор будет вибрировать, но вращаться не сможет. Поэтому синхронный двигатель необходимо сначала раскрутить, т. е. довести до нормального числа оборотов, и лишь после этого включать ток в обмотку статора.

Раскручивание синхронных двигателей производится механическими способами (при малых мощностях) и специальными электрическими устройствами (при больших мощностях).
При небольших изменениях нагрузки режим двигателя автоматически изменяется, приспосабливаясь к новой нагрузке. Так, при увеличении нагрузки на вал двигателя ротор мгновенно затормаживается. Благодаря этому меняется фазовый сдвиг между напряжением сети и противодействующей ЭДС индукции, наводимой индуктором в обмотке статора.
Кроме того, реакция якоря создает размагничивание индукторов, поэтому ток в статоре растет, индукторы испытывают увеличенный вращающий момент и двигатель, вновь начинает вращаться синхронно, преодолевая увеличенную нагрузку. Аналогичный процесс происходит при уменьшении нагрузки.
При резких колебаниях нагрузки эта приспособляемость двигателя может оказаться недостаточной, скорость его изменится значительно, он "выпадет из синхронизма" и в конце концов остановится, при этом исчезает ЭДС индукции, наводившаяся в статоре, и ток в нем резко увеличивается. Поэтому следует избегать резких колебаний нагрузки. Для остановки двигателя, очевидно, нужно сначала выключить цепь статора, а потом уже выключать индукторы, при пуске двигателя следует придерживаться обратного порядка операций.
Синхронные двигатели наиболее часто применяются для привода механизмов, которые работают с постоянной скоростью. Достоинства и недостатки синхронных двигателей, а также способы их пуска рассмотрены здесь: Синхронные двигатели и их применение
Учебный диафильм - "Синхронные двигатели", созданный фабрикой учебно-наглядных пособий в 1966-году. Посмотреть его можно здесь: Диафильм "Синхронный двигатель"
Читайте также: