
Назначение и область использования систем определения местоположения и связи кратко
Обновлено: 06.07.2024
Аннотация к статье "ИНФОРМАЦИОННО-НАВИГАЦИОННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНЫМ СОСТАВОМ": В последнее время наблюдается рост спроса на автоматизированные системы (АС), объединяющие современные навигационные системы с системами мобильной связи для решения различных прикладных задач. Ярким примером такой интеграции являются системы управления транспортным парком предприятия с возможностью организации связи с подвижными единицами и автоматическим отслеживанием и отображением их текущих координат в пространстве. На Западе системы определения местоположения (ОМП) активно используются для контроля за местоположением и состоянием автотранспорта специального назначения: патрульных автомобилей полиции, карет скорой помощи, автомобилей служб инкассации и т.д. Создание и использование таких систем немыслимо без надежных средств связи диспетчера с ТС и постоянного контроля за их движением. Средства УКВ-радиосвязи действуют лишь на очень небольших расстояниях (десятки километров). Попытки создания сети ретрансляторов в УKB-диапазоне наталкиваются на значительные технические и финансовые трудности, так как это требует значительных единовременных и эксплуатационных затрат. В спутниковых системах связь с ТС осуществляется непосредственно через спутник, поэтому зона связи чрезвычайно широка.

2. Бычков Ю.В., Васильев Д.С., Павлов А.О. Алгоритмические модели в релейной защите. // Релейная защита и автоматизация. – 2012. – No 1. – С.26-31
4. Лукоянов В.Ю. Эра отечественных приборов ОМП. // Релейная защита и автоматизация. – 2014. – No 2. – С. 43-44.
К современным средствам координатно-временного определения различных объектов, в том числе ТС, относятся системы спутникового позиционирования. Спутниковое позиционирование — метод определения координат объекта в трехмерном пространстве с использованием спутниковых систем. Особенно важной особенностью данных систем является их интеграция с геоинформационными системами (ГИС).
Автомобиль, оснащенный таким приемником, перемещаясь по местности, автоматически фиксирует свои координаты. Может быть осуществлен ввод дополнительной информации. Данные накапливаются в цифровом виде в соответствующих форматах и могут быть выведены на экран в целях визуализации и контроля.
К первому поколению спутниковых систем ОМП можно отнести системы, которые разрабатывались до 1970-х годов и использовались более двух десятилетий: NNSS (США), ЦИКАДА (СССР).[2] NNSS (Navy Navigation Satellite System) первоначально предназначалась для ВМФ США. Позже система получила название TRANSIT; в эксплуатации с 1964 г., в 1967 г. открыта для гражданского коммерческого использования. В 1970-х годах появились сравнительно малогабаритные приемники GEOCEIVER, позволившие определять координаты с дециметровой точностью. К 1980 г. многие тысячи потребителей разных государств мира пользовались услугами этой системы.
Ко второму поколению относятся две системы: GPS (США) и ГЛОНАСС (РФ). GPS (Global Positioning System) имеет параллельное название NAVSTAR (Navigation Satellite Timing and Ranging). Запуск спутников первого блока начат в 1978 г. ГЛОНАСС расшифровывается как Глобальная навигационная спутниковая система. Уже работают приемные устройства, одновременно использующие и GPS, и ГЛОНАСС.
Орбитальные группировки GPS и ГЛОНАСС состоят из 24 космических аппаратов (КА). КА в GPS расположены в шести, а ГЛОНАСС — в трех плоскостях, развернутых соответственно через 60° и через 120°.
Для передачи данных несущий сигнал модулируется по фазе, частоте или амплитуде. Соответственно модуляция называется фазовой, частотной или амплитудной (ФМ, ЧМ или AM).
В ГЛОНАСС и GPS имеет место особый способ ФМ — манипуляция фазы: в момент смены в коде 0 на 1 или 1 на 0 фаза несущего колебания изменяется на 180°.
Задачи ОМП автомобилей, других транспортных средств, ценных грузов крайне актуальны как для государственных правоохранительных органов, так и для частных структур безопасности.[3] Такие задачи приходится решать в процессе управления патрульными службами и контроля перемещения подвижных объектов, обеспечения безопасности автомашин и их поиска в случае угона, сопровождении ТС, ценных грузов и т.д.
В системах автоматического (автоматизированного) определения местоположения транспортного средства — AVL (Automatic Vehicle Location system) местоположение ТС определяется автоматически по мере перемещения его в пределах данной географической зоны. Система AVL обычно состоит из подсистемы ОМП, подсистемы передачи данных и подсистемы управления и обработки данных.
По назначению AVL-системы можно разделить:
- на диспетчерские системы, в которых осуществляется централизованный контроль в определенной зоне за местоположением и перемещением ТС в реальном масштабе времени одним или несколькими диспетчерами системы, находящимися в стационарных диспетчерских центрах (это могут быть системы оперативного контроля перемещения патрульных автомашин, контроля подвижных объектов, системы поиска угнанных автомашин);
- системы дистанционного сопровождения, в которых производится дистанционный контроль перемещения подвижного объекта с помощью специально оборудованной автомашины или другого ТС; чаще всего такие системы используются при сопровождении ценных грузов или контроле перемещения транспортных средств;
- системы восстановления маршрута, решающие задачу определения маршрута или мест пребывания ТС в режиме постобработки на основе полученных тем или иным способом данных; подобные системы применяются при контроле перемещения ТС, а также с целью получения статистических данных о маршрутах.
В состав конкретной AVL-системы часто входят технические средства, обеспечивающие несколько способов определения местоположения.[4] В зависимости от размера географической зоны, на которой действует AVL-система, она может быть:
- локальной, т.е. рассчитанной на малый радиус действия, что характерно в основном для систем дистанционного сопровождения;
- зональной, ограниченной, как правило, пределами населенного пункта, области, региона;
- глобальной, для которой зона действия составляет территории нескольких государств, материк, территорию всего земного шара.
С точки зрения реализации функций ОМП AVL-системы характеризуются такими техническими параметрами, как точность местоопределения и периодичность уточнения данных. Очевидно, что эти параметры зависят от зоны действия AVL-системы. Чем меньше размер зоны действия, тем выше должна быть точность ОМП. Так, для зональных систем, действующих на территории города, считается достаточной точность ОМП (называемая также зоной неопределенности положения) от 100 до 200 м. Некоторые специальные системы требуют точности в единицы метров, для глобальных систем бывает достаточно точности в несколько километров. Для зональных диспетчерских систем идеальным может считаться получение данных о местоположении подвижного объекта до одного раза в минуту. Системы дистанционного сопровождения требуют большей частоты обновления информации.
Рассматривая аппаратуру определения местоположения, специалисты предсказывают, что будущее в этой области принадлежит двум спутниковым радионавигационным системам: российской “ГЛОНАСС” (глобальная навигационная спутниковая система) и американской “NAVSTAR” (Navigational Satellits Time and Ranging - навигационные спутники измерения времени и координат), именуемая также по ее фактическому назначению “GPS” (Global Positioning System - глобальная система местоопределения).
Основой каждой из систем является группа спутников (21 действующий спутник + 3 резервных), выведенных на прецизионные орбиты, характеризующиеся тем, что в любое время в любом месте Земли в пределах видимости оказывается не менее 3-х спутников. Каждый спутник группы излучает радионавигационный сигнал.
Обе системы создавались для военных целей и предназначены для навигационного обеспечения военных объектов и прежде всего носителей стратегического наступательного оружия. Такая военная направленность заложена в наиболее существенный элемент обоих систем - радионавигационный сигнал. Сделано так, что наивысшая точность навигационных определений доступна лишь потребителям военных объектов, а остальные потребители лишены возможности пользоваться высокоточной навигацией. Предусмотрено разделение спутникового радионавигационного сигнала на две составляющие - легкообнаруживаемую и скрытую (защищенную). Легкообнаруживаемая составляющая доступна для любого потребителя, защищенная - только для военного (или особых невоенных пользователей). Каждый из спутников любой из СРНС (“ГЛОНАСС” или “GPS”) передает на Землю навигационные сигналы по двум частотным каналам L1 (“ГЛОНАСС” - 1602,56 - 1615,5 МГц; “GPS” - 1575,42 МГц) и L2 (“ГЛОНАСС” - 1246,44 - 1256,5 Мгц; “GPS” - 1227,6 Мгц). По каналу L1, который является основным, передаются одновременно оба навигационных сигнала, а по каналу L2 - только один защищенный сигнал.
Потребители СНРС определяют свое местоположение с помощью приемников спутниковых радионавигационных сигналов в состав которых входит специальный процессор. В результате обработки процессором информации, содержащейся в навигационных сигналах, потребителю на табло или дисплее приемника отображаются координаты места нахождения приемника - географические широта и долгота. Средняя точность определения местоположения в системе “GPS” для невоенных пользователей составляет около 100 метров. Большую точность невоенные потребители могут получить используя специальные методы, на основе так называемого дифференциального приема. Эти методы позволяют достичь точности определения положения около 10 метров. Для достижения таких результатов к приемнику спутниковых радионавигационных сигналов присоединяется специальный приемник. Последний декодирует сигналы с более низких частот, получаемые с передатчика наземного базирования с заранее определенными координатами и корректирует данные, полученные от спутника.
Для пользователей системы “ГЛОНАСС” российскими предприятиями разработана и выпускается навигационная аппаратура в нескольких модификациях, рассчитанная на массовое производство и применение в различных условиях. В комплект аппаратуры пользователя входят: приемник, антенна, процессор и устройство индикации (общий вес 1,5-2,5 кг).
Приемники аппаратуры - многоканальные, могут принимать одновременно сигналы от 6 - 12 спутников, находящихся в зоне видимости пользователя. Кроме того, они могут настраиваться на передатчики системы ”NAVSTAR”. Все это позволяет повысить точность измерений.
Для работы в составе ГИС к приемникам навигационных сигналов добавляются приемопередатчики с индивидуальными номерами. ГИС через приемопередатчик, расположенный в пункте контроля (например, в дежурной части), опрашивает приемопередатчики, установленные на подвижных объектах, используя их индивидуальные номера, и отображает на электронной карте их местоположение. В настоящее время применяются готовые системы определения местоположения, имеющие в своем составе как приемники спутниковых радионавигационных сигналов, так и приемопередатчики и средства отображения на электронной карте, рассчитанные на обслуживание транспортного парка от нескольких десятков до 1000 подвижных объектов.
Назначение и область использования систем определения местоположения
В последнее время наблюдается рост спроса на автоматизированные системы (АС), объединяющие современные навигационные системы с системами мобильной связи для решения различных прикладных задач. Ярким примером такой интеграции являются системы управления транспортным парком предприятия с возможностью организации связи с подвижными единицами и автоматическим отслеживанием и отображением их текущих координат в пространстве. На Западе системы определения местоположения (ОМП) активно используются для контроля за местоположением и состоянием автотранспорта специального назначения: патрульных автомобилей полиции, карет скорой помощи, автомобилей служб инкассации и т.д.
Создание и использование таких систем немыслимо без надежных средств связи диспетчера с ТС и постоянного контроля за их движением. Средства УКВ-радиосвязи действуют лишь на очень небольших расстояниях (десятки километров). Попытки создания сети ретрансляторов в УKB-диапазоне наталкиваются на значительные технические и финансовые трудности, так как это требует значительных единовременных и эксплуатационных затрат.
Средства КВ-диапазона в принципе обеспечивают связь на больших расстояниях, однако эта связь крайне нестабильна и возможна лишь в определенные периоды суток. К тому же оборудование и антенны КВ-радиосвязи достаточно громоздки, а более совершенные образцы достаточно дороги. Сотовая связь даже в Западной Европе не охватывает всю территорию, а в странах СНГ — охватывает лишь отдельные крупные города и участки дорог. Спутниковые системы связи (ССС), безусловно, в наибольшей степени отвечают потребностям транспортников.
Автоматическое получение и хранение информации. Компьютер принимает и хранит всю поступающую информацию даже в отсутствие диспетчера. Кроме того, в системе используется принцип электронного почтового ящика. Если компьютер диспетчера выключен, информация не пропадает, а хранится в центральном компьютере системы. Когда диспетчер включит свой компьютер, он получит всю информацию.
Дистанционный контроль параметров. Дополнительно МСТ могут оснащаться системами телеметрии в нескольких вариантах комплектации для контроля различных параметров транспортных средств и грузов (температура в рефрижераторах, расход горючего, несанкционированное вскрытие и т.д.).
оптимальное планирование, основанное на имеющихся фрахтах, точном знании местонахождения и сроков прибытия автомашин;
возможность оперативного управления автомашинами в рейсе в соответствии с меняющейся обстановкой, в том числе их пере адресация и постановка новых задач;
сокращение времени кругорейса за счет:
оптимального управления движением ТС (уведомление грузоотправителя/грузополучателя о точном времени прибытия автомобиля, что значительно сокращает простой при загрузке/выгрузке, заблаговременный заказ по ходу движения диспетчером других ТС и сервисных услуг, оптимизация маршрута с учетом сведений о дорожной обстановке, помощь в поиске клиента и т.д.);
своевременной помощи водителю при возникновении у него затруднений в контактах с грузоотправителем/грузополучателем, на погранпереходах, при поломках, авариях, различных конфликтных ситуациях;
отсутствия необходимости сворачивать с трассы и искать телефон для связи с диспетчером, простоев на ожидание ответа;
исключения несанкционированных простоев и изменений маршрута;
возможности для диспетчера связаться с водителем в любое время;
получение большего числа фрахтов, более высокая оплата, так как многие грузоотправители предпочитают доверить груз той фирме, машины которой оснащены спутниковой системой, позволяющей контролировать движение груза (особенно при отправке ценных или опасных грузов), при этом они готовы повысить оплату фрахта;
возможность работать на условиях доставки точно в срок, когда ставки за фрахт значительно выше, но за несвоевременную подачу машин накладываются большие штрафы. Система позволяет контролировать процесс перевозки и при возникновении непредвиденных ситуаций использовать резервы;
возможность работать с перецепкой, используя импортные тягачи и наиболее опытных водителей для работы за рубежом, а остальной парк — для доставки грузов от границы. С помощью системы обеспечивается необходимая для такой работы координация работы парка ПС;
экономия горючего и моторесурсов за счет сокращения холостого пробега и пробега с неполной нагрузкой, неоптимальных решений, принимаемых водителем самостоятельно при недостаточной информированности, съездов с трассы для телефонных разговоров, а также экономия средств, затрачиваемых на сами международные телефонные переговоры;
возможное снижение страховых взносов, так как постоянный контроль за движением автопоездов существенно снижает риск страховщика.
Это лишь основные факторы. Имеется и множество других, которые позволяют добиться впечатляющих результатов. Опыт работы как зарубежных, так и отечественных транспортных предприятий показывает, что в современных условиях средства, вложенные в систему связи и управления, приносят прибыли больше, чем средства, вкладываемые в наращивание количества ПС без таких систем.
К современным средствам координатно-временного определения различных объектов, в том числе ТС, относятся системы спутникового позиционирования. Спутниковое позиционирование — метод определения координат объекта в трехмерном пространстве с использованием спутниковых систем. Особенно важной особенностью данных систем является их интеграция с геоинформационными системами (ГИС).
Автомобиль, оснащенный таким приемником, перемещаясь по местности, автоматически фиксирует свои координаты. Может быть осуществлен ввод дополнительной информации. Данные накапливаются в цифровом виде в соответствующих форматах и могут быть выведены на экран в целях визуализации и контроля.
К первому поколению спутниковых систем ОМП можно отнести системы, которые разрабатывались до 1970-х годов и использовались более двух десятилетий: NNSS (США), ЦИКАДА (СССР). NNSS (Navy Navigation Satellite System) первоначально предназначалась для ВМФ США. Позже система получила название TRANSIT; в эксплуатации с 1964 г., в 1967 г. открыта для гражданского коммерческого использования. В 1970-х годах появились сравнительно малогабаритные приемники GEOCEIVER, позволившие определять координаты с дециметровой точностью. К 1980 г. многие тысячи потребителей разных государств мира пользовались услугами этой системы.
Ко второму поколению относятся две системы: GPS (США) и ГЛОНАСС (РФ). GPS (Global Positioning System) имеет параллельное название NAVSTAR (Navigation Satellite Timing and Ranging). Запуск спутников первого блока начат в 1978 г. ГЛОНАСС расшифровывается как Глобальная навигационная спутниковая система. Уже работают приемные устройства, одновременно использующие и GPS, и ГЛОНАСС.
Орбитальные группировки GPS и ГЛОНАСС состоят из 24 космических аппаратов (КА). КА в GPS расположены в шести, а ГЛОНАСС — в трех плоскостях, развернутых соответственно через 60° и через 120°.
Для передачи данных несущий сигнал модулируется по фазе, частоте или амплитуде. Соответственно модуляция называется фазовой, частотной или амплитудной (ФМ, ЧМ или AM).
В ГЛОНАСС и GPS имеет место особый способ ФМ — манипуляция фазы: в момент смены в коде 0 на 1 или 1 на 0 фаза несущего колебания изменяется на 180°.
В 1970-х годах стали развиваться методы измерения дальностей с использованием радиоимпульсов с начальными фазами 0 и π, интерпретируемых как 0 и 1. Закономерное чередование нулей и единиц образует код. Кодовые сигналы воспринимаются как случайный шум. Поэтому их называют псевдослучайными последовательностями (ПСП) или псевдослучайными кодами (Pseudo Random Code). Они обладают малой мощностью, однако благодаря строгой закономерности построения их удается выделить из общего шумового фона даже при помощи миниатюрных антенн. Тем не менее сигналы должны в несколько раз превышать уровень шума. Важным показателем является отношение сигнал/шум — SNR (Signal to Noise Ratio). Чем SNR больше, тем лучше.
В ГЛОНАСС все сигналы модулированы одними и теми же кодами высокой точности (ВТ) или стандартной точности (СТ). Каждый спутник работает на собственных частотах (т. е. разделение сигналов частотное).
На спутниках эталонные генераторы высокостабильных колебаний одновременно являются хранителями времени. На борту каждого КА сигналы формируются от четырех цезиевых атомных стандартов с относительной нестабильностью частоты около 10 -13 в сутки. Передаваемые радиосигналы несут метки времени. По этим меткам на Земле при помощи станций службы времени производится сверка временных шкал с государственными эталонами. По ним же синхронизируют измерения и в аппаратуре пользователей.

В этой статье мы расскажем про глобальные системы позиционирования, разработанные в США, России, ЕС и Китае; объясним, как поддержка технологий глобальной спутниковой навигации реализована в электронных устройствах, а также опишем ключевые и дополнительные функции современных навигационных приемников.

Система GPS (Global Positioning System) создавалась для применения в военных целях. Она начала работать в конце 80-х — начале 90-х годов, однако до 2000 года искусственные ограничения на определение местоположения существенно сдерживали ее возможности использования в гражданских целях.
- Определение точного местоположения
- Навигация, движение по маршруту с привязкой к карте на основании реального местоположения
- Синхронизация времени
Орбиты спутников системы GPS. Пример видимости спутников из одной из точек на поверхности Земли. Visible sat — это число спутников, видимых над горизонтом наблюдателя в идеальных условиях (чистое поле).
ГЛОНАСС

Российский аналог GPS — ГЛОНАСС (глобальная навигационная спутниковая система) — была развёрнута в 1995 году, но в связи с недостаточным финансированием и малым сроком службы спутников она не получила широкого распространения. Вторым рождением системы можно считать 2001 год, когда была принята целевая программа ее развития, благодаря которой ГЛОНАСС возобновил полноценную работу в 2010 году.
Сегодня на орбите работают 24 спутника ГЛОНАСС, они охватывают навигационным сигналом весь земной шар.
Новейшие потребительские устройства используют GPS и ГЛОНАСС как взаимодополняющие системы, подключаясь к ближайшим найденным спутникам, это значительно увеличивает скорость и точность их работы.

Пример: aвтомобильное GPS/ГЛОНАСС-навигационно-связное устройство на базе ОС Android, разработанное командой Promwad по заказу российского конструкторского бюро. Реализована поддержка GSM/GPRS/3G. Устройство автоматически обновляет информацию о дорожной обстановке в режиме реального времени и предлагает водителю оптимальный маршрут с учётом загруженности дорог.
Сейчас на стадии разработки находятся еще две спутниковые системы: европейская Galileo и китайская Compass.
Galileo

Галилео — совместный проект Европейского союза и Европейского космического агентства, анонсированный в 2002 году. Изначально рассчитывали, что уже в 2010 году в рамках этой системы на средней околоземной орбите будут работать 30 спутников. Но этот план не был реализован. Сейчас предположительной датой начала эксплуатации Galileo считается 2014 год. Однако ожидается, что полнофункциональное использование системы начнется не ранее 2020 года.
Compass

Это следующая ступень развития китайской региональной навигационной системы Beidou, которая была введена в эксплуатацию после запуска 10 спутников в конце 2011 года. Сейчас она обеспечивает покрытие в границах Азии и Тихоокеанского региона, но, как ожидается, к 2020 году система станет глобальной.

Сравнение орбит спутниковых навигационных систем GPS, ГЛОНАСС, Galileo и Compass (средняя околоземная орбита — MEO) с орбитами Международной космической станции (МКС), телескопа Хаббл и серии спутников Иридиум (Iridium) на низкой орбите, а также геостационарной орбиты и номинального размера Земли.
Поддержка ГНСС
- Smart Antenna — модуль, состоящий из керамической антенны и навигационного приемника. Преимущества: компактность, не требует согласования, удешевляет разработку за счет сокращения сроков.
- MCM (Multi Chip Module) — чип, включающий все компоненты навигационного приемника.
- OEM — экранированная плата, включающая ВЧ интерфейсный процессор и процессор частот основной полосы (RF-frontend + baseband), SAW-фильтры и обвязку. Это наиболее популярное решение на данный момент.
Ключевые параметры навигационных приемников
- Сигналы от спутников
- Альманах — информация о приблизительных параметрах орбит всех спутников, а также данные для калибровки часов и характеристики ионосферы
- Эфемериды — точные параметров орбит и часов каждого спутника
Производители приемников используют различные методы уменьшения TTFF, включая скачивание и сохранения альманаха и эфемерид по беспроводным сетям передачи данных (т.н. метод Assisted GPS или A-GPS), это быстрее чем извлечение этих данных из сигналов ГНСС.
Холодный старт описывает ситуацию, когда приемнику нужно получение всей информации для определения места. Это может занять до 12 минут.
Теплый старт описывает ситуацию, когда у приемника есть почти вся необходимая информация в памяти, и он определит место в течении минуты.
Одним из ключевых параметров навигационных модулей в мобильных устройствах является энергопотребление. В зависимости от режима работы модуль потребляет различное количество энергии. Фаза поиска спутников (TTFF) характеризуется большим, а слежение меньшим энергопотреблением. Также производители реализуют различные схемы уменьшения энергопотребления, например, путем периодического перевода модуля в режим сна.
Как правило, все модули выдают данные по текстовому протоколу NMEA-0183, но кроме указанного текстового протокола каждый производитель имеет свой собственный двоичный протокол (Binary), который позволяет изменять конфигурацию модуля под конкретное использование либо получать доступ к дополнительному функционалу, а также доступ к сырым измерениям. Двоичный протокол удобен для использования на микроконтроллерах, т.к. при этом нет необходимости выполнять преобразование из текста в двоичные данные, тем самым экономя программную память путем исключения библиотеки работы со строками и времени на преобразование.
Стандарт NMEA-2000 — это развитие протокола NMEA-0183. В качестве физического уровня в NMEA-2000 используется CAN-шина, которая была выбрана в виду большей защищенности по сравнению с RS-232. С точки зрения протокола передачи данныхNMEA-2000 существенно отличается от своего предшественника, т.к. использует двоичный протокол, базирующийся на стандарте SAE J1939.
Частота обновления данных о местоположении и скорости всех модулей составляет 1 Гц, но при необходимости ее можно поднять до 5 или 10 Гц.
В зависимости от области применения модуль можно сконфигурировать под определенные динамические характеристики, которые он должен отслеживать (например, максимальное ускорение объекта). Это позволяет использовать оптимальный алгоритм и улучшать качество измерений.
Для выполнения навигационной задачи модуль должен одновременно принимать сигналы от нескольких спутников, т.е. иметь несколько приемных каналов. На сегодняшний день это число лежит в диапазоне от 12 до 88.
Точность определения местоположения по GPS составляет в среднем 15 м, она обусловлена используемым неточным сигналом, влиянием атмосферы на распространение радиосигнала, качеством кварцевых генераторов в приемниках и пр. Но с помощью корректирующих методов возможно улучшить точность определения местоположения. Эта технология называется Differential GPS. Существует два метода коррекции: наземный и спутниковый DGPS.
В наземных методах коррекции наземные станции дифференциальных поправок постоянно сверяют свое заведомо известное местоположение и сигналы от навигационных спутников. На базе этой информации вычисляются корректирующие величины, которые могут быть переданы с помощью УКВ- или ДВ-передатчика на мобильные DGPS-приемники в формате RTCM. На основании полученной информации потребитель может корректировать процесс определения собственного местоположения. Точность этого метода составляет 1—3 метра и зависит от расстояния до передатчика корректирующей информации и качества сигнала.
Спутниковые методы, такие как система WAAS (Wide Area Augmentation System), доступная в Северной Америке, и система EGNOS (European Geostationary Navigation Overlay System), доступная в Европе, шлют корректирующие данные с геостационарных спутников, таким образом достигается большая область приема, чем при наземных методах.
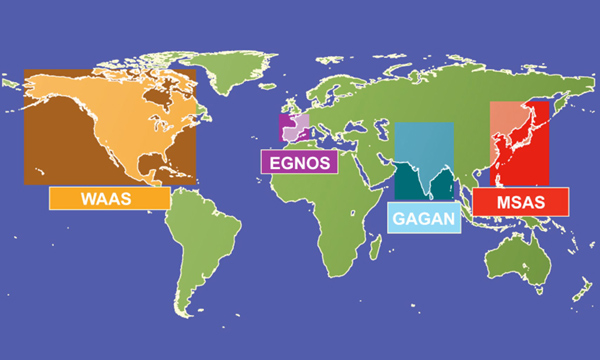
Спутниковые системы дифференциальной коррекции (SBAS — Space Based Augmentation Systems) позволяют улучшить точность, надежность и доступность навигационной системы за счет интеграции внешних данных в процессе расчета
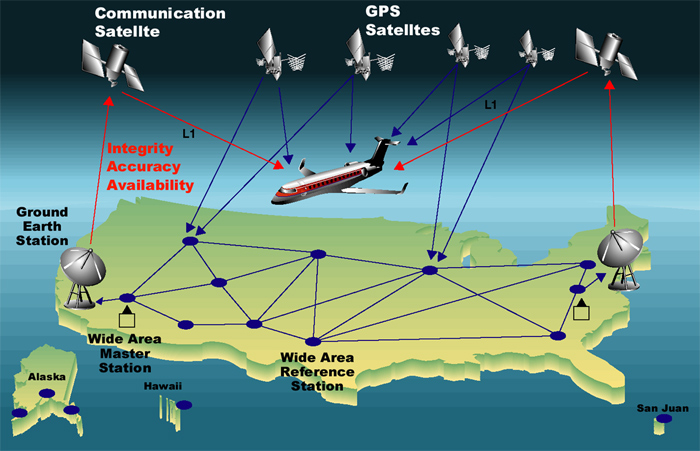
Демонстрация принципа работы системы WAAS (Wide Area Augmentation System) на территории США
Одним из основных параметров, влияющих на точность определения местоположения и стабильность приема является чувствительность. Она, как правило, определяется качеством малошумящего усилителя на входе приемника и сложностью реализованных алгоритмов цифровой обработки. Типовые значения современных приемников лежат в диапазоне 143 дБм для поиска и 160 дБм для слежения.
Кроме определения местоположения ГНСС предоставляют информацию о точном времени. Как правило, все приемники имеют выход PPS (pulse per second, импульсов в секунду) — секундная метка (1 Гц), которая точно синхронизирована с временной шкалой UTC.
Дополнительные функции навигационных устройств
Счисление пути. На основе информации о направлении движения и пройденном пути (предоставляется дополнительными датчиками) приемник может рассчитывать свои координаты при отсутствии сигналов от спутников (например, в туннелях, на подземных стоянках и в плотной городской застройке).
Некоторые модули имеют возможность напрямую подключать флэш-память (например, по SPI) к модулю для записи трека c необходимой периодичностью. Эта функция позволяет отказаться от использования отдельного микроконтроллера, либо она может быть полезной для минимизации энергопотребления (т.е. система на кристалле может находиться в состоянии сна).
На этом поверхностный обзор технологий глобальной спутниковой навигации завершен. Спасибо за внимание. Примеры реализованных проектов на базе этих ГЛОНАСС и GPS можно посмотреть на странице разработок компании Promwad.
Читайте также:
- Закрытая школа 4 сезон 8 серия смотреть онлайн бесплатно в хорошем качестве
- Рейтинг музыкальных школ екатеринбурга
- Протоколы рабочей группы по внедрению профстандартов в школе
- Примерные образовательные программы начального общего образования фгос 2021 школа россии
- Составные компоненты школьной программы в соответствии со стандартами второго поколения