
История развития радиолокации кратко
Обновлено: 04.07.2024
Тема мне очень близка, поскольку служил в ПВО и люблю подобную технику, а сдача квалификационного экзамена всегда была праздником. Первого класса нет, на срочной службе просто недостаточно времени дорасти до этой квалификации.
Статья по иностранным источникам, среди пионеров радаростроения упомянут и Советский Союз, объем материала явно недостаточен, но по СССР достаточно материала, стоит только погуглить.
Понятно, что сторонний человек статью не откроет, но открывавший непременно дочтет до конца, притом, что статья очень обширная. Неделю назад я бы сам так и впился в содержимое.
Первые эксперименты
Серьезные исследовательские работы по радарам начались в 1930-х годах, но основные идеи радиолокации имеют началом классические эксперименты по изучению электромагнитных волн, проведенные в конце 1880-х годов немецким физиком Генрихом Герцем.
Герц своими опытами подтвердил более ранние теоретические работы шотландского физика Джеймса Кларка Максвелла. Максвелл вывел формулы распространения электромагнитного поля, из чего следовало, что природа световых и радиоволн одинакова, и отличаются они лишь частотой.
Из работ Максвелла следовало, что радиоволны могут отражаться от металлических объектов и преломляться в диэлектрических средах, совершенно так же, что и свет. Герц продемонстрировал это свойство в 1888 году, на радиоволнах длиной 66 см (частота 455 МГц).
Даже в то время возможность обнаружения целей уже привлекла внимание на основе практического интереса. В 1904 году во многих странах немецким инженером Кристианом Хюльсмайером был запатентован "детектор препятствий и устройство для навигации судов" на основе продемонстрированного Герцем принципа. Устройство было названо "телемобилоскопом". Уже тогда провидцы писали, что "это изобретение может иметь значение для будущих войн".
Изобретатель построил телемобилоскоп и представил его чинам из Германского морского ведомства, но прибор не привлек интерес чиновников. Экономической, социальной или военной необходимости в радарах не существовало вплоть до начала 1930-х годов, когда появились тяжелые бомбардировщики дальнего действия и ведущие мировые державы озаботились разработкой устройств, способных обнаруживать приближение вражеских самолетов.
Но до Второй Мировой войны большинство государств разрабатывали устройства, основанные на иных, чем радиолокация, принципах. К этим принципам относились акустическое обнаружение и обнаружение электрических помех от систем зажигания самолетных двигателей. Также, пытались использовать для обнаружения воздушных целей инфракрасные датчики. Но ничто из перечисленного не доказало своей эффективности.
Первые военные радары
В 1930-х годах 8 стран, независимо одна от другой, приступили к опытам по использованию радиоэха для обнаружения воздушных целей. К этому их побудила нарастающая военная опасность, при этом они уже обладали достаточным опытом в области радиотехнологий.
Соединенные Штаты, Великобритания, Германия, Франция, Советский Союз, Италия, Нидерланды и Япония приступили к экспериментам с радарами, с переменным успехом и разным уровнем мотивации; причем почти одновременно начали работы по использованию радаров в военной области. К началу Второй мировой войны многие из этих стран уже располагали образцами работоспособных военных радаров.
Впервые эффект отражения сигнала от объекта наблюдался в научно-исследовательской лаборатории военно-морских сил в Вашингтоне, США, в 1922 году. На одном берегу реки Потомак располагался радиопередатчик, а на другом - радиоприемник. Судно, случайно проходящее по реке, вызывало изменение уровня принимаемого сигнала. (Нынче подобная конфигурация называется двухпозиционной РЛС). Несмотря на многообещающие результаты эксперимента, чиновники морского ведомства США отказались спонсировать дальнейшие разработки.
Принцип радара был "переоткрыт" в 1930 году, когда американский инженер-электрик Лоуренс А. Хайленд заметил, что пролетающий в зоне луча передающей антенны самолет вызывает изменение уровня принимаемого сигнала. Как и ранее, высшие морские чины не испытали энтузиазма по поводу возможности обнаружения целей радиосредствами.
И лишь когда инженеры научились использовать одну и ту же антенну и для передачи, и для приема сигнала (ныне эта конфигурация называется однопозиционной РЛС), значение радаров для обнаружения и сопровождения воздушных и морских судов было окончательно признано. Подобная система была продемонстрирована на море на линкоре ВМС США Нью-Йорк в начале 1939 года.
Первые радары, разработанные сухопутной армией США, работали на частоте 205 МГц (SCR-268 для управления стрельбой) и частоте 100 МГц (SCR-270 для обнаружения самолетов).
Оба эти радара нашли применение с началом Второй Мировой войны. 6 наличных на Гавайях радаров SCR-270 успешно обнаружили 7 декабря 1941 года приближающиеся к Перл-Харбору японские бомбардировщики; но важность радиолокационных наблюдений не была воспринята, пока на военную базу не начали падать первые бомбы.
Англичане начали работу над радаром в 1935 году. Британское правительство, ввиду угрозы приближения войны, требовало ускорения работ. С сентября 1938 года и всю войну созданная радарная система, названная Чейн Хоум , работала в круглосуточном режиме.
Радары системы Чейн Хоум позволили англичанам, с ограниченными средствами ПВО, успешно противостоять многочисленным германским воздушным атакам весь начальный период войны. Радары работали на частоте 30 МГц, т.е. на коротких волнах, что нетрадиционно для радаров. Инженерное решение оказалось не самым оптимальным, но изобретатель радара, шотландский физик сэр Роберт Уотсон-Уотт, был уверен, что "то, что работает, лучше идеального решения, которое подоспеет слишком поздно".
Советский Союз также начал, в 1930-х годах, работы в области радиолокации. К моменту нападения Германии на СССР в июне 1941 года, инженерами был разработан ряд радаров, и уже производился радар для обнаружения самолетов с рабочей частотой 75 МГц (диапазон УКВ). Разработка и производство радаров были прекращены с началом нападения Германии, и производство пришлось переместить.
Наибольшего прогресса к началу войны достигла Германия. Германия располагала наземными и воздушными радарами, для противостояния бомбардировщикам стран антигитлеровской коалиции. Уже в начале 1936 года радар был установлен на немецком "карманном линкоре". Разработка новых радаров была приостановлена в Германии к концу 1940 года, поскольку считалось, что война уже выиграна. Но именно тогда США и Великобритания умножили свои усилия. К моменту, когда немцы осознали свой просчет, догонять было уже поздно.
Исключая несколько типов немецких радаров, работавших на частотах 375 и 560 МГц, все успешные радарные системы, разработанные до начала Второй Мировой войны, работали в диапазоне УКВ, на частотах ниже 200 МГц, что было связано с рядом проблем.
Прежде всего, радарам диапазона УКВ свойственен слишком широкий луч, при том, что узкий луч обеспечивает большую точность, лучшее разрешение, и отсутствие нежелательных отражений от земли и нежелательных помех.
Далее, диапазон УКВ спектра электромагнитных волне не позволяет излучать сигнал с широкой частотной полосой, что требуется для излучения коротких импульсов, позволяющих точнее определять местоположение цели.
И, наконец, в диапазоне УКВ велик уровень атмосферных помех, ограничивающих чувствительность приемного устройства. Несмотря на все эти недостатки, в 1930-х годах УКВ-радары являлись наиболее передовыми устройствами. Но уже на этапе ранних разработок было осознано, что желательна работа на еще более высоких частотах, в основном оттого, что узкий луч может быть достигнут при сравнительно небольших антеннах.
Успехи радиолокации в годы Второй Мировой войны
Прорыв в микроволновый диапазон, со всеми его преимуществами, произошел в конце 1939 года, с изобретением британскими физиками из Бирмингемского университета резонаторного магнетрона. В 1940 году британцы с гордостью раскрыли Соединенным Штатам концепцию магнетрона и тайно перевезли образец в США, работа над которым составила основное содержание работы организованной Массачусетским технологическим институтом радиолокационной лаборатории при Кембриджском университете. Реальностью микроволновые радары в годы Второй Мировой войны стали благодаря магнетрону.
Как результат работы лаборатории, за 5 лет работы (1940-1945) ею было разработано свыше 100 различных радарных систем. Одной из самых примечательных разработок лаборатории явился радар SCR-584 управления артиллерийским огнем. По нашим понятиям, это станция орудийной наводки (СОН). Станция использовала сопровождение с коническим сканированием, при котором скошенный рабочий луч непрерывно вращается относительно центральной оси антенны, при ширине диаграммы направленности (лепестка) в 4 градуса. Это гарантирует высокую точность углового обнаружения, что позволяло наводить артиллерийские орудия на цель без помощи оптики (чего требовали прежние радары с более широким лучом, например SCR-268).
Радар SCR-584 работал на частотах 2,7-2,9 ГГц (по англ. терминологии, диапазон частот S-band, или сантиметровый), с параболической антенной диаметром 2 метра. Впервые этот радар был задействован в начале 1944 года в битве за итальянский город Анцио (итало-американский фильм 1968 года Битва за Анцио ). Новый радар появился вовремя, поскольку к тому времени немцы уже научились подавлять радар SCR-268. Появление же на театре войны радара SCR-584 застало немцев врасплох.
Советский Союз выпускал копию радара SCR-584 под названием СОН-4, для управления огнем крупнокалиберной зенитной артиллерии.
Радары послевоенной эпохи
Разработка новых радаров после войны притормозилась. Вторая половина 1940-х годов прошла в реализации выдвинутых в ходе войны идей. Две из этих идей - моноимпульсная радиолокация и индикация движущихся целей, что будет обсуждено ниже в абзацах о доплеровских радарах и определении скорости цели. Для реализации этих идей потребовалось немало лет исследований и работы.
Новые и лучшие радары появились в 1950-х годах, одним из них явился высокоточный моноимпульсный радар AN/FPS-16, определяющий угловое положение цели с точностью 0,1 миллирадиана (около 20 дуговых секунд).
Впрочем, не исключено, что миллирадиан армии США и НАТО не равен геометрическому миллирадиану ("настоящий" миллирадиан = 1/6283 окружности, миллирадиан стран НАТО = 1/6400 окружности).
Появились также мощные радары дальнего обнаружения воздушной цели с рабочей частотой 220 и 450 МГц. Эти системы снабжались огромной вращающейся антенной с размером по горизонтали 37 метров. Другим достижением явился клистронный усилитель, позволяющий создавать мощные радары дальнего действия.
В начале 1950-х годов впервые появился радар с синтезированием апертуры (искусственным раскрывом антенны), но на доведение его до совершенства потребовалось почти 30 лет, с внедрением цифровой обработки и прочих усовершенствований. Также, в конце 1950-х годов был представлен бортовой импульсно-доплеровский радар для крылатых ракет класса "воздух-воздух" Бомарк .
Все 1950-е годы были также посвящены важным теоретическим разработкам в области радиолокационной техники. Это, в частности,
- статическая теория обнаружения сигнала на фоне шумов;
- теория согласованной фильтрации, позволившая оптимально конфигурировать приемное устройство радара для обнаружения слабых сигналов;
- функция неопределенности Вудворда, позволившая уточнить форму зондирующего сигнала для повышения точности измерения дальности и радиальной скорости;
- доплеровская фильтрация для индикации движущихся целей, что приобрело особую важность с развитием цифровых технологий, позволивших воплотить на практике теоретические разработки.
Еще до начала Второй Мировой войны был известен эффект доплеровского смещения и возможность его использования, но на реализацию принципа потребовались годы. Серьезное использование принципа началось в 1950-х годах, и к настоящему времени принцип эксплуатируется во множестве радарных систем. Как пояснялось ранее, доплеровское смещение отраженного сигнала проистекает от относительного движения цели и радара. Работа радаров непрерывного излучения, индикации движущихся целей, и импульсно-доплеровских на фоне мощных местных помех немыслимы без использования доплеровской частоты.
Доплеровский сдвиг - основа работы полицейских радар-детекторов. В радарах с синтезированной апертурой и инверсных РЛС с синтезированной апертурой доплеровская частота используется для получения образов (визуализации) местности и цели с высоким разрешением.
Доплеровский сдвиг также используется в системах радионавигации для измерения скорости воздушного судна, несущего радар. Извлечение доплеровского смещения в погодных радарах, более того, позволяет идентифицировать ураганы и опасные ветровые сдвиги, на что не способны радары иных систем.
Первый огромный электронно-управляемый радар с фазированной электронной решеткой был введен в эксплуатацию в 1960-х годах. В это время для ВМС США с целью установки на американском палубном самолете дальнего радиолокационного обнаружения Грумман E-2 .была разработана бортовая РЛС индикации движущихся воздушных целей.
Также, в 1960-е годы были раскрыты многие характеристики загоризонтных РЛС, а также разработано радары обнаружения баллистических ракет и космических спутников.
Российская загоризонтная РЛС "Яхрома", предполагаемая, по предложению издания Avia.pro, к установке к 2030 году на Кубе. Официальных подтверждений информации нет
Российская загоризонтная РЛС "Яхрома", предполагаемая, по предложению издания Avia.pro, к установке к 2030 году на Кубе. Официальных подтверждений информации нет
Радары цифровой эры
1970-е годы привели к стремительному развитию цифровых технологий, что сделало практически осуществимой цифровую обработку сигналов и данных с современных радаров. Радикальный прогресс был достигнут в конструкции бортовых импульсно-доплеровских радаров, существенно повысив их способность выделять воздушные цели на фоне сильных отражений от местников.
Система дальнего радиолокационного обнаружения и управления Авакс и военных бортовых радаров перехвата базируется на импульсно-доплеровском принципе. Также, в 1970-е годы радары стали использоваться на космических кораблях для удаленного сбора разведывательной информации в окружающей среде.
В последующее десятилетие радиолокационные методы развились до состояния, позволяющего радарам различать между целями различных типов. Также, в 1980-е годы стало осуществимым серийное производство РЛС с фазированной антенной решеткой для систем ПВО (системы Пэтриот и Иджис ), бортовых радаров для бомбардировщиков B-1B, и систем обнаружения Пэйв Поз .
Радар наземной радиолокационной системы дальнего обнаружения и раннего предупреждения о ракетном нападении Пэйв Поз
Радар наземной радиолокационной системы дальнего обнаружения и раннего предупреждения о ракетном нападении Пэйв Поз
Прогресс в области дистанционного зондирования сделал возможным измерение дующих над поверхностью моря ветров, среднего уровня моря для обмера земного геоида, волнистости морской поверхности, состояния льда, и прочие эффектов окружающей среды. Новые возможности радаров проявились с внедрением твердотельных технологий и интегральных микросхем СВЧ-диапазона, при том, что 10-20 лет назад эти возможности представлялись научным курьезом.
Дальнейшее развитие компьютерных технологий в 1990-е годы позволило получать еще больше информации о целях и окружающей среде путем обработки отраженного сигнала. Новые возможности прогноза опасных погодных явлений появились с внедрением доплеровских погодных радаров (например, NEXRAD), позволяющих измерять радиальную компоненту скорости ветра, а также интенсивности осадков. В крупных аэропортах или вблизи них были установлены аэродромные доплеровские метеорологические радары для предупреждения об опасных изменениях скорости и направления ветра при взлете и посадке.
От производителей радаров для таких применений, как управление воздушным движением, потребовалось создание радаров, работающих без обслуживающего персонала и с минимальным временем простоя на ремонт. Загоризонтные радары появились у множества стран, прежде всего для дальнего обнаружения воздушных целей (на расстояниях порядка 3700 км).
РЛС космического базирования продолжали собирать информацию о земной и морской поверхности по всему земному шару. Космические зонды доставили к Венере улучшенные РЛС с формированием изображения и передали на Землю изображение ее поверхности с высоким разрешением, проникнув впервые в истории через ее непроницаемый облачный покров.
Первые радары ПВО от баллистических ракет были задуманы и разработаны в середине 1950-х и 1960-х годов, но работа над подобными системами была остановлена с подписанием в 1972 году Договора об ограничении систем противоракетной обороны между СССР и США. Применение в ходе войны в Персидском заливе (1990-1991) тактических баллистических ракет вновь вновь побудило США создавать радары для защиты от них. США и Россия наращивали свои системы ПВО для защиты от подобных ракет. Израиль, для защиты территории страны, разместил РЛС с фазированными антенными решетками как часть системы ПРО.
США разработали мобильный комплекс наземных РЛС на основе твердотельных технологий с активной апертурой и фазированными антенными решетками высотного заатмосферного перехвата ракет средней дальности на театре военных действий (THAAD GBR).
Прогресс цифровых технологий в первом десятилетии 21-го века привел к дальнейшему совершенствованию методов обработки сигналов и данных, с целью разработок почти полностью цифровых радаров с фазированными антенными решетками. Появились мощные передатчики миллиметровых волн для радиолокационной техники (с типичной рабочей частотой 94 ГГц), при этом их средняя мощность в 100-1000 раз превышает мощность прежних передатчиков.
Термин локация (и его всевозможные производные) произошел от латынского слова locatio - размещение, распределение и означает определение местоположения объекта по сигналам (звуковым, тепловым, оптическим, электромагнитным волнам и др.), излучаемым самим объектом (пассивная локация) иои отраженным от него сигналом, излучаемым самим устройством (активная локация).
Следует отметить, что свойствами локации (способностью определять положение количественного объекта по отношению к себе или свое положение в пространстве) обладают многие животные и человек - бинауральный эффект или т.н. биолокация.
В зависимости от применяемых методов и технических средств различают звуковую локацию (гидро, звуко, эхо), радиолокацию (электромагнитную) и, позднее появившиеся: оптическая (лазерная) локация, планетная (радиолокационная астрономия) и загоризонтная (ионосферная) радиолокации.
Первоначально, в годы 1-й мировой войны появились гидролокаторы (приборы, которые могут обнаруживать самолет по звуку двигателей) - т.н. звукоулавливатели.
Над созданием звукоулавливателей, которые вошли в состав приборов управления артилллерийским зенитным огнем (ПУАЗО), в СССР работали: Центральная радиолаборатория (ЦРЛ), Всесоюзный электротехнический институт (ВЭИ), Военная артиллерийская академия (ВАУ) им.Ф.Э.Дзержинского и Научно-исследовательская лаборатория артиллерийского приборостроения Главного артиллерийского управления (НИЛАП ГАУ). Образцы первых звукоулавливателей испытывались на подмосковном полигоне в 1929-1930 годах. В 1931 г были созданы опытные образцы системы "Прожзвук" (крупногабаритный звукоулавливатель и полутораметровй электрический прожектор).
Предпосылками работ по созданию и дальнейшему развитию радиолокации послужили несколько исторических фактов:
- явление отражения радиоволн наблюдал еще Г.Герц в 1886-1889 годах, а в 1897 г А.С.Попов (во время опытов по радиосвязи на Балтийском море) зарегистрировал влияние корабля, пересекающего трассу радиоволн, на силу сигнала (передатчик был установлен на верхнем мостике транспорта "Европа", а приемник - на крейсере "Африка");
- в 1904 г немецкий ученый-изобретатель Кристиан Хюльсмэйер (Christian Hulsmeyer) 1954 в своей авторской заявке (патент N165546 от 30 апреля 1904 г) четко сформулировал идею обнаружения корабля по отраженным от него радиоволнам и содержащей также подробное описание устройства для ее реализации. Позднее, в том же 1904 г, им был получен и второй патент (N169154) на усовершенствование своего устройства для радиолокации.
- в 1914 г росиянин И.И.Ренгартен проводил работы по макетированию радиопеленгатора;
- в 1916 г французами П.Ланжевеном и К.Шиловским был создан ультразвуковой гидролокатор;
- в сентябре 1922 г два экспериментатора, служившие в ВМФ США, - Хойт Э.Тейлор и Лео К.Янг проводили опыты по радиосвязи на декаметровых волнах (3-30 МГц) через реку Потомак. В это время по реке прошел корабль, и связь прервалась - что натолкнуло их на мысль о применении радиоволн (метод интерференции незатухающих колебаний) для обнаружения движущихся объектов;
- в 1921 г америкаец А.У.Хэлл изобрел магнетрон (промышленный его вариант был готов к 1928 г) - что дало возможность последующего развития радиолокационных станций (РЛС) на СВЧ.
- в 1924 г английский ученый Э.Эплтон провел на декаметровых волнах измерения высоты слоя Кеннелли-Хевисайда (слой "Е" ионосферы, от которого отражаются радиосигналы);
- в 1925 г английские ученые Г.Брейт и М.Тьюков опубликовали результаты работ по определению высоты слоя Кеннелли-Хевисайда измерением времени запаздывания импульсного сигнала, отраженного от слоя, относительно сигнала, пришедшего вдоль поверхности Земли;
- в июне 1930 г моряк ВМФ США Лоренс Э.Хайленд, проводя эксперименты по определению направления с помощью декаметровых волн, обнаружил, что когда над передающей антенной пролетает самолет, поле радиосигнала сильно искажается, и в результате чего, Хайленд предложил использовать декаметровые волны для предупреждения о приближении вражеских самолетов;
- в январе 1931 г Авиационная радиолаборатория ВМС в Вашингтоне приступила к выполнению проекта, имевшего целью "обнаружение вражеских судов и самолетов с помощью радио";
- в начале 1931 г проводились (к сожалению неудачные) опыты по установлению связи между городами - английским Дувром и французским Кале при помощи волн длиною 18 см;
- в 1932-1933 годах английское морское ведомство стало применять приборы АСДИК, регистрирующие ультразвуки высокой частоты, создаваемые шумом винтов подводных лодок;
- в 1932 г большой объем работ по изучению интерференции при отражении радиоволн от самолета выполнили американские инженеры Б.Тревор и П.Картер;
- в 1934 г сотрудник Морской исследовательской лаборатории США Роберт Пейдж первым зарегистрировал (сфотографировал) отраженный от самолета сигнал на частоте 60 МГц.
- в 1935 г, независимо друг от друга, работы по импульсной радиолокации проводили: П.К.Ощепков (СССР) и Р.Ватсон-Ватт (Великобритания. Изготовленная им аппаратура получила отраженный сигнал от самолета на расстоянии 15 км).
- в 1935 г радиолокация получила первое коммерческое применение: во Франции фирма "Societe Francaise Radioelectrique" установила на лайнере "Нормандия" т.н. "Детектор препятствий", а в 1936 г в порту Гавра был установлен т.н. "Радиопрожектор" для обнаружения судов, входящих в гавань и покидающих ее;
- в 1936 г американцами - Р.Колвеллом и А.Френдом были зафиксированы отражения радиоимпульсов от турбулентных и инверсионных слоев в тропосфере.
В 1936 г макет американской РЛС, работавшиц на частоте 80 МГц, обнаружил самолет на расстоянии 65 км (в 1937 г у немцев была достигнута дальность 35 км).
2 июля 1936 г в США была изготовлена первая небольшая РЛС, работавшая на частоте 200 МГц, которая в апреле следующего года была установлена на борту эсминца "Лири". РЛС получили название РАДАР (сокращенное обозначение от "Radio Detection And Ranging", т.е. "Прибор для радиопеленгации и измерения"). Hа базе данной РЛС в 1938 г была разработана модель XAF, прошедшая широкие бортовые испытания в 1939 г (прототип модели 1940 г - CXAM, которая была установлена на 19 военных кораблях).
Первые пять импульсных РЛС (работали на метровых волнах) для обнаружения самолетов были установлены на юго-западном побережье Великобритании в 1936 г.
Первые работы по радиолокационному обнаружению самолетов в СССР были начаты в 1933 г по инициативе М.М.Лобанова. С 1934 г данные работы возглавили Ю.К.Коровин, П.К.Ощепков (Ленинградский электрофизический институт) и Б.К.Шембель. Первая серийная РЛС (РУС-1) появилась в 1938 г в КБ, которым руководил Д.С.Стогов. РУС-1 были применены во время финской военной кампании 1939-1940 гг.
В 1937 г в Лениградском ФТИ под руководством Ю.Б.Кобзарева был разработан импульсный метод радиолокации.
В 1940 г было начато серийное производство первой импульсной радиолокационной станции дальнего обнаружения самолетов РУС-2 ("Редут"), разработкой которой с 1935 г занимались П.А.Погорелко и Н.Я.Чернецов. Во время ВОВ было развернуто производство портативных РЛС "Пегматит".
4 июля 1943 г вышло Постановление Государственного Комитета Обороны (ГКО) об учреждении при нем Совета по радиолокации. Практическое руководство повседневной деятельностью Совета осуществлял Аксель Иванович Берг (впоследствии - академик), а отвественным секретарем Совета был Александр Александрович Турчанин.
В 1943 г по инициативе Совета по радиолокации был создан Институт локационной техники, который возглавил П.З.Стась. Главным инженером стал профессор А.М.Кугушев.
В июне 1947 г Совет по радиолокации был преобразован в Комитет по радиолокации при СHК СССР и его председателем стал М.З.Сабуров.
Загоризонтная радиолокация базируется на открытии в 1947 г советским ученым H.И.Кабановым явления дальнего рассеянного отражения от Земли декаметровых волн (с их возвратом после отражения от ионосферы к источнику излучения).
Hеоценимый вклад в создание и разработку советской радиолокационной техники также внесли: В.Д.Калмыков, А.И.Шокин (в течении ряда лет был министром электронной промышленности СССР), А.Н.Щукин и мн. др.
После окончания Второй мировой войны начался этап активной разработки планетной радиолокации и первыми ее объектами стали Луна и метеоры. Первые эхо-сигналы от солнечной короны были получены в 1959 г (США), а от Венеры - в 1961 г (Великобритания, СССР и США). В СССР радиолокацию Венеры, Меркурия, Марса и Юпитера выполнил в 1961-1963 гг коллектив ученых во главе с В.А.Котельниковым.
Большой вклад в развитие отечественной оптической локации внесли ученые: Н.Г.Басов, Ф.М.Прохоров, А.Л.Микаэлян и др.
85 лет назад, в феврале 1935 года, шотландский физик Роберт Уотсон-Уатт успешно продемонстрировал свое новое изобретение, позволяющее обнаружить самолет на расстоянии. Новинка получила название радар, от английского Radio Detection and Ranging – радиообнаружение и измерение дальности.
Как и в случае со многими другими изобретениями, дату точного создания радара и имя его создателя зафиксировать сложно. В первой половине XX века ученые ведущих стран двигались параллельными путями, приходя к тем или иным решениям иногда практически одновременно. А появление таких сложных устройств, как радар, всегда является результатом работы многих людей и коллективов. Однако историки едины во мнении, что приближающаяся Вторая мировая война стала своего рода ускорителем для многих ключевых технологий XX века, в том числе и для радиолокации.
Теоретические основы для радиообнаружения объектов были заложены еще в конце XIX века, но для их практического воплощения потребовались еще долгие годы и изобретение большого количества вспомогательных для радиолокатора устройств и технологий. За пальму первенства в создании радара в условиях секретности боролись технологические лидеры – Великобритания, Германия, США, Франция и СССР.
Эстафета переходит в Германию
В 1904 году немец Христиан Хюльсмейер запатентовал устройство под названием телемобилоскоп. Этот прибор предполагалось использовать в судоходстве для обнаружения кораблей в условиях плохой видимости. Телемобилескоп был построен на основе искрового генератора радиоволн и в своей последней версии мог находить суда на расстоянии до 3 км. Однако устройством не заинтересовались ни гражданские, ни военные, предпочитая по старинке пользоваться на судах паровыми ревунами. По сути прибор Хюльсмайера был еще не радаром, а радиодетектором. Существовавшие на тот момент технологии еще не позволяли построить полноценный радиолокатор.
Лучи смерти и британские радиолокаторы
Теперь отправимся в Великобританию, у которой к 1935 году, в отличие от Германии, США и СССР, больших успехов в разработке радиолокаторов не было. Занимательно, что к созданию первого радара английских оборонщиков подтолкнули слухи о наличии у немцев генераторов лучей смерти, способных уничтожать самолеты противника на расстоянии. Проверить возможность создания такого оружия поручили радиофизику Национальной физической лаборатории Роберту Уотсону-Уатту – потомку изобретателя паровой машины Джеймса Уатта.
Вместе с помощником ученый доказал утопичность уничтожения авиатехники лучами, но в процессе работы пришел к выводу, что отраженные от самолета радиоволны можно улавливать и тем самым обнаруживать технику врага. С идей разработки радиоопределителя физик обратился к заказчику исследования.
![1424893432_robert.jpg]()
Роберт Уотсон-Уатт проводит первые испытания радара
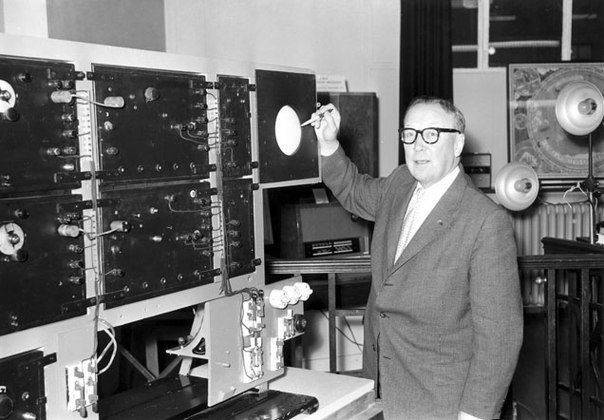
Инициатива Уотсона-Уатта была поддержана, и 26 февраля 1935 года он провел первые успешные испытания своего радиоопределителя направления, которому удалось засечь летящий бомбардировщик на расстоянии 13 км. К 1936 году эта цифра достигла 150 км. К началу Второй мировой войны в Великобритании была построена первая в мире национальная система радиолокационной защиты. Она включала в себя более 20 станций и перекрывала подлеты к Британским островам по всем основным направлениям возможной атаки. Станции располагались по побережью цепочкой, из-за чего система получила название Chain Home.
Изобретение Роберта Уотсона-Уатта остановило авиавторжение Германии на Британские острова. Радиолокаторы засекали самолеты противника и давали британским силам ПВО 20-минутное преимущество. В течение трех месяцев немцы потеряли над побережьем Великобритании 1887 машин – почти половину всего боевого флота.
Первые советские радары
В 1920-е годы ученые в СССР создали импульсную радиолокационную установку и смогли с помощью отраженного радиосигнала измерить расстояние до ионосферы. В 1925 году физики Введенский, Симанов, Халезов и Аренберг указали на возможность применения для радиолокации ультракоротких радиоволн. А в 1934 году в Ленинграде начались первые полноценные опыты с аппаратурой радиообнаружения – в январе радиолокационным методом на расстоянии 600 метров был найден самолет, летящий на высоте 150 метров.
Радар на борту

На данном уроке мы познакомим учащихся со свойствами радиоволн различной длины; объясним принцип радиолокации и рассмотрим ее применение. А также познакомим учащихся с этапами развития и становления современного телевидения.
В данный момент вы не можете посмотреть или раздать видеоурок ученикам
Чтобы получить доступ к этому и другим видеоурокам комплекта, вам нужно добавить его в личный кабинет, приобретя в каталоге.
Получите невероятные возможности



Конспект урока "Радиолокация. Понятие о телевидении. Развитие средств связи"
Человечество было сформировано не императорами,
жрецами, полководцами, а теми, кто создал топор,
колесо, самолет, кто нашел злаки, следил за звездами,
кто открыл железо, полупроводники и радиоволны.
Даниил Гранин
В данной теме речь пойдёт об использовании радиоволн в современном мире, а именно речь пойдет о радиолокации и телевидении. Также поговорим о развитии средств связи.
Электромагнитная волна — это распространяющееся в пространстве периодически изменяющееся электромагнитное поле.
Впервые электромагнитные волны экспериментально получил, передал на расстояние (правда в пределах стола) и принял Генрих Герц. А уже в апреле 1895 года, Александр Степанович Попов создал первый в мире радиоприемник. С этого момента и начинается история развития и использования электромагнитных волн для нужд человечества.
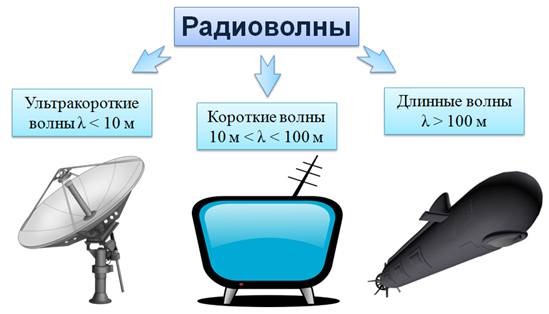
Наиболее широкое применение из всего диапазона электромагнитных волн нашли радиоволны. Все радиоволны можно разделить на 3группы: ультракороткие, короткие и длинные волны.
Выбор используемой длины радиоволн зависит от конкретной задачи.
Например, с помощью мегаметровых волн можно держать связь с подводными лодками. Одни из самых распространенных — метровые, чаще всего используют для работы радио и телевидения, а сантиметровые и дециметровые — в радиолокации, т.е. в обнаружении объектов с помощью радиоволн.
На распространение радиоволн очень сильно влияют форма и физические свойства земной поверхности. Особенно сильное влияние на распространение радиоволн оказывают слои ионизированного газа в верхних слоях атмосферы. Эти слои, их еще называют ионосферой, ионизируются электромагнитным излучением Солнца и потоком заряженных частиц, излучаемых им. При этом, проводящая электрический ток ионосфера отражает все радиоволны, длина волны которых превышает 10 метров. Поэтому распространение таких волн на большие расстояния происходит только за счет многократных отражений от поверхности Земли и ионосферы.
Если же мы будем использовать радиоволны с длиной волны значительно превышающей 100 метров, то сможем создать устойчивую радиосвязь между удаленными точками на земной поверхности вне прямой видимости. Все дело в том, что такие волны (а это длинные волны) способны огибать выпуклую поверхность Земли. Причем это огибание будет выражено тем сильнее, чем больше длина волны.
А вот если использовать ультракороткие радиоволны, длина волны которых менее 10 метров, то можно выйти на связь с международной космической станцией. Дело в том, что такие волны могут свободно проходить через ионосферу и при этом практически не огибают земную поверхность.
Помимо всего вышеперечисленного, радиоволны, как и любые другие электромагнитные волны, распространяются прямолинейно и отражаются от преград.
Эти свойства радиоволн используются во многих отраслях современного мира. Об одном таком использовании поговорим более подробно. А именно, разговор пойдет о радиолокации.
История развития радиолокации своими корнями уходит в 1898 год, когда Александр Степанович Попов пытался осуществить радиосвязь между двумя кораблями, находящимися на расстоянии 5-ти километров друг от друга. В определенный момент после четкого и довольно устойчивого сигнала передатчика неожиданно обнаружился эффект затухания радиосигнала, который вскоре пропал. Как оказалось, в этот самый момент между двумя подопытными кораблями проходил третий. Это, можно сказать, и были первые эксперименты в области радиолокации. Тогда стало ясно, что электромагнитные волны можно использовать не только для связи, но и для обнаружения объектов в воздухе. Однако, в то время, применить практически открытую возможность дальнего видения никому не удалось.
Активное развитие радиолокации началось во время второй мировой войны. В Советском Союзе, Великобритании и США стали производить радары для раннего обнаружения самолетов вражеской авиации.
Современные локаторы засекают цели не только на сверхдальних расстояниях, но и за оптически непрозрачными преградами. Причем видят они не только неодушевленные объекты, но и живые организмы.

Что же такое радиолокация? Этот вопрос почти наверняка не у кого не вызовет затруднений. Хотя и не все непосредственно занимаются радиолокацией, но интернет, телевидение и документальные фильмы достаточно хорошо познакомили нас с вращающимися антеннами и серьезными сосредоточенными лицами операторов, которые вглядываются в слабо светящиеся экраны, мерцающие таинственными световыми пятнами — отметками целей.

Излучается радиоволна в пространство (это делает передатчик) и ожидается, когда появится отраженный сигнал. О его приходе извещает приемник радиолокационной станции, который снабжен огромной антенной для улавливания слабых отраженных сигналов. Если вокруг нет никаких предметов, которые отражали бы радиоволны, то отраженного сигнала не будет. Но, вероятнее всего, что радиоволна встретит на своем пути какое-то препятствие. В этом случае происходит либо отражение радиоволны, либо ее рассеяние. При отражении та часть волны, которая попадает на отражающий объект, сохраняет свою структуру, но изменяет направление своего движения. И если отраженная волна попадает на антенну, то в приемнике радиолокационной станции появится довольно сильный сигнал. И чем больше площадь отражающего объекта, тем сильнее принятый сигнал и тем отчетливее отметка от цели на экране индикатора.
Это явление легко смоделировать в домашних условиях. Для этого нужно лишь маленькое зеркало и солнышко в окошке. Оно и будет выполнять роль передатчика радиолокационной станции. Зеркально отражающий объект — зеркальце, а в качестве приемника отраженного сигнала можно использовать, например, кошку. Пока солнечный зайчик будет бегать по ковру и стенам, кошка будет спокойно сидеть и недоуменно смотреть на Вас (отраженный сигнал не попадает в приемник). Но как только световое пятнышко попадет на нее, кошка зажмурится, и тем сильнее, чем больше будет зеркальце. Сигнал принят.
Известно, что для проведения радиолокационных наблюдений необходим передатчик, чувствительный приемник с антенной, сигнал и какой-нибудь отражающий объект.
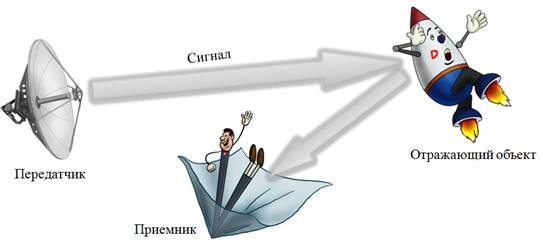
Как организовать их совместную работу в тех или иных случаях? Существует довольно много схем построения радиолокационных станций, и каждой схеме соответствует тот или иной принцип работы. Рассмотрим импульсный радиолокатор.
Импульсный радиолокатор излучает радиоволны в виде коротких радиоимпульсов, длина каждого из них несколько тысячных или миллионных долей секунды. В момент излучения передатчиком радиоимпульса приемник радиолокатора отключают, чтобы мощный передаваемый сигнал не повредил его. Как только передатчик отключают, так сразу же включают приемник, который ждет появление слабого отраженного сигнала. Через некоторое время, когда придет отраженный сигнал или исчезнет всякая надежда на его появление, снова включают передатчик и отключают приемник. И такой цикл повторяют непрерывно, пока станция ведет радиолокационное наблюдение.
Работа такого радиолокатора напоминает поведение человека, который любит послушать обычное эхо. Каждый знает немало мест, где эхо слышно особенно хорошо. Найдите такое место, крикните какое-нибудь заветное слово и прислушайтесь. Если Вам повезло и Вы нашли удачное место, то эхо можно услышать два или даже три раза. Когда эхо замокнет, можете крикнуть еще раз, и снова услышите ответ. Но если кричать непрерывно, то ничего не услышите, так как сами себя оглушите криком. Так и радиолокационная станция прекращает излучение, чтобы можно было принимать слабые отраженные сигналы (кстати, специалисты называют их эхо-сигналами).
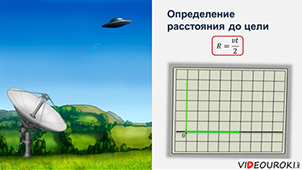
Как же с помощью радиолокации определяется местоположение объекта? Станция включилась в работу. Сигнал срывается с передающей антенны и со скоростью света устремляется к цели. Одновременно на экране индикатора световой луч развертки начинает свой путь из точки, которая обозначает место расположения станции (на экране появляется всплеск около нулевой отметки шкалы дальности). Система развертки устроена таким образом, что при отсутствии цели луч будет все время прочерчивать на экране светящуюся горизонтальную линию (но будем все-таки считать, что цель есть). Вот сигнал достиг цели, отразился от нее и, вернувшись к станции, попал на огромное полотнище приемной антенны. И в этот момент луч сделает на экране засечку — цель обнаружена. То же происходит и со всеми последующими сигналами. Если цель приблизится к станции, то сигнал совершит свое путешествие к ней и обратно быстрее, а значит и луч развертки раньше засветит отметку от цели. Так как скорость, с которой путешествует сигнал, постоянна, то время, прошедшее с момента излучения сигнала до его приема, пропорционально удвоенному расстоянию до цели. Поэтому выбрав подходящий коэффициент пропорциональности, можно измерить расстояние на индикаторе, которое успел пробежать луч развертки за это время, непосредственно в километрах или милях. Так получается шкалу дальности на экране индикатора. Теперь достаточно заметить цифру, у которой возникает отметка от цели, чтобы сказать, на какой дальности она находиться.

где R – расстояние до цели.
В настоящее время радиолокация занимает существенную нишу как в военно-оборонной сфере, так и в гражданской. Радиолокационные установки обнаруживают корабли и самолеты на расстоянии до нескольких сот километров. Во все крупных аэропортах мира локаторы следят за взлетающими и идущими на посадку воздушными судами. Все современные корабли и самолеты также снабжены радиолокаторами, которые служат им для навигационных целей. Их используют службы погоды для наблюдения за облаками. И наконец, локаторы активно используются в наблюдениях за космическими объектами и в исследовании космоса.


А теперь, разобравшись с некоторыми аспектами радиолокации, настало время поговорить еще об одном способе использования радиоволн. А именно речь пойдет о телевидении.
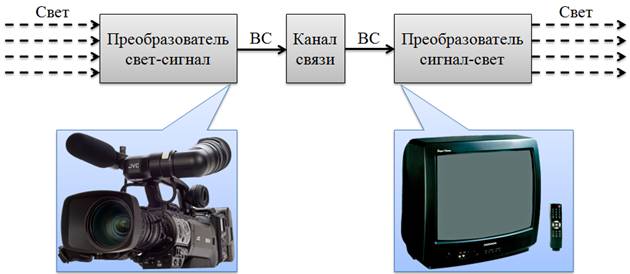
Современная телевизионная система состоит из трех узлов, каждый из которых выполняет свою четко сформулированную задачу. Так, преобразователь свет-сигнал (это может быть, например, видеокамера) из поступающего на его вход оптического изображения формирует электрический сигнал, который принято в телевидении называть сигналом изображения или видеосигналом.
Видеосигнал, в свою очередь, передается по каналу связи и затем в месте приема преобразуется в изображение на телевизионном экране.
Наиболее часто в настоящее время в качестве преобразователя сигнал-свет используются приемные телевизионные трубки (кинескопы), жидкокристаллические экраны, проекционные кинескопы и т.д.
Несмотря на простоту схемы телевизионной системы, необходимо отметить, что ТВ устройства являются едва ли не самыми сложными из радиоэлектронных устройств. Это связанно с тем, что телевидение постоянно развивается и совершенствуется, вбирая в себя новейшие достижения науки и техники и стимулируя, в свою очередь, их развитие. Современный этап развития телевидения характеризуется интенсивным внедрением цифровых технологий обработки сигналов, использованием достижений твердотельной электроники, созданием и развитием цифрового спутникового телевидения, разработкой и внедрением ТВ систем высокой четкости.

Любопытным в истории развития телевидения является тот факт, что основополагающие принципы телевидения были сформированы более века назад. Идея создания первой телевизионной системы была предложена Джоном Керри. В 1875 году он предложил телевизионную систему с разбиением изображения на отдельные элементы (так называемое мозаичное изображение). А в 1880 году российский ученый Порфирий Иванович Бахметьев предложил информацию о каждом из элементов изображения извлекать, передавать по каналу связи и воспроизводить последовательно с помощью телевизионной развертки.
За прошедший век в телевидении произошли существенные изменения, связанные с общим техническим процессом. На смену оптико-механическим ТВ системам невысокого качества пришли системы электронного телевидения. Черно-белое (монохромное) телевидение повсеместно вытеснено системами цветного ТВ вещания. Аналоговое телевидение постепенно превращается в цифровое. Не исключена возможность внедрения в обозримом будущем стереоскопического телевидения. Однако, несмотря на столь очевидный прогресс, телевидение развивалось и развивается в рамках направления, ограниченного вышеупомянутыми предложениями Джона Керри и Порфирия Бахметьева. И действительно, понятие элемента изображения (пиксел) является фундаментальным в современном телевидении, а развертка — основным технологическим процессом при анализе и синтезе телевизионного изображения.
Принцип действия современной системы визуального телевидения основан на использовании процесса развертки, осуществляемого дважды — на передающей и приемной сторонах.
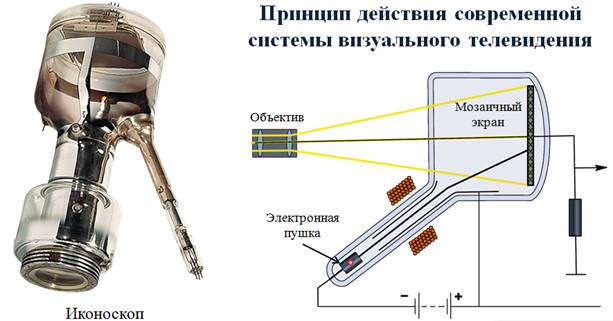
В процессе развертки на передающей стороне формируется видеосигнал, при этом происходит пространственно-временная дискретизация, т.е. разложение изображения на кадры, строки и элементы. Это происходит благодаря передающей вакуумной трубки, называемой иконоскопом. Внутри такой трубки располагается мозаичный экран, на который проецируется изображение объекта. Под действием падающей на ячейки световой энергии, каждая из них определенным образом заряжается. Далее, с помощью электронной пушки формируется электронный пучок, который поочередно попадает на все элементы мозаики от строчки к строчке. При этом изменяется заряд каждой ячейки мозаики.
После передачи данного видеосигнала по каналу связи производится восстановление телевизионного изображения с помощью видеоконтрольного устройства. Синтез изображения как операция, обратная разложению, также связан с процессом развертки, которая производится синтезирующей апертурой в плоскости изображения. В качестве синтезирующей апертуры в ТВ приемниках в настоящее время наиболее широко используется подвижное световое пятно, возникающее в результате взаимодействия сфокусированного электронного луча высокой энергии с катодолюминофором, нанесенным на экран кинескопа — приемной телевизионной электронно-лучевой трубки. Системы катушек горизонтального и вертикального отклонения заставляют такой луч сканировать весь экран точно так же, как электронный луч сканирует мозаичный экран в передающей трубке. Вследствие чего и возникает свечение экрана в местах попадания луча, а мы с вами наслаждаемся просмотром любимой телепередачи или фильма.

Конечно, был рассмотрен самый простой способ передачи изображения на расстояние — черно-белое. Получение цветного изображения сходно с получением черно-белого, однако в нем изображение разлагается на видеосигнал, несущий компоненты, соответствующие основным цветам спектра — красному, синему и зеленому.

Еще совсем недавно междугородняя телефонная связь осуществлялась только по воздушным линиям связи, на надежность которых оказывали влияние многочисленные факторы: грозы, сильные ветра и обледенение проводов. Сейчас же широко применяются кабельные и радиорелейные линии, сотовая мобильная связь и многое другое.
С развитием техники совершенствуется и аппаратура средств связи. Например, на смену простой телефонной связи пришли цифровые телекоммуникационные системы, которые обладают огромными функциональными возможностями.
Однако настоящей революцией в развитии средств связи, наверное, следует считать появление всемирной системы общедоступных электронных сетей — Интернет. Компьютерный мир уже давно стал сетевым. И появление Интернета, позволило людям со всех стран и всех континентов обмениваться огромными объемами различной информации.
Читайте также: