
Доклад физика в робототехнике
Обновлено: 20.05.2024
- Для учеников 1-11 классов и дошкольников
- Бесплатные сертификаты учителям и участникам
Выберите документ из архива для просмотра:
Выбранный для просмотра документ Паспорт.doc
2.Цель проекта: изучить физические законы в робототехнике на примере сконструированного робота.
Задачи:
Найти инструкцию сборки шагающего робота
Поэтапно собрать робота
Разработать необходимого программного обеспечения
Описать составные части робота и датчиков с физической точки зрения
3.Автор проекта: Лоскутников Евгений
4.Руководители: Иванова Надежда Ивановна, учитель физики; Бахур Людмила Дмитриевна, учитель информатики.
5.Консультант: Соколова Людмила Николаевна, библиотекарь.
6.Тип проекта: Технический
6.1.По доминирующей в проекте деятельности: творческий, практико – ориентированный
6.2.По предметно-содержательной области: естественно-научный
6.3.По характеру координации проекта: с открытой координацией.
6.4.По количеству участников проекта: личный
6.5.По широте охвата содержания: интегрированный;
6.6.По времени проведения: продолжительный
6.7.По характеру контактов (степени охвата): в рамках школы.
7.Образовательная область с которой связано содержание проекта: информатика, физика, техника, технология
8.Методы, использованные в работе над проектом: поиск и изучение информации, планирование, моделирование, программирование, конструирование, защита.
9.Форма представления проекта: в печатном виде, материальная модель
10.Образовательные и культурно-просветительные учреждения, на базе которых выполнялся проект: база школы.
11.Источники информации: научно-популярные журналы , словари, справочники, интернет, инструкция.
12.Заказчик проекта: кабинет информатики
13.Необходимое оборудование: компьютер с подключением к Интернету, принтер, офисная бумага, папка с файлами, конструктор LEGO Education 9797, среда программирования NXT .
14. Этапы работы над проектом: постановка проблемы; выдвижение путей решения проблемы; планирование деятельности по реализации проекта; сбор информации; структурирование; моделирование; программирование; информации; изготовление продукта; конструирование; программирование; оформление продукта; выбор формы защиты; презентации; подготовка презентации; презентация; самооценка и анализ.
Выбранный для просмотра документ Презентация.pptx
Описание презентации по отдельным слайдам:

Идеи робототехники в античную эпоху Гомер


Роботы в наших домах

Цель проекта: изучить физические законы в робототехнике на примере сконструированного робота.

Задачи: Найти инструкцию сборки шагающего робота. Поэтапно собрать робота. Разработать необходимое программное обеспечение. Описать составные части робота и датчиков с физической точки зрения.



Основные части робота Процессор NXT 2.0



Датчики Датчик освещённости Биполярный фототранзистор




Продукт – шагающий робот

Спасибо за внимание!
Выбранный для просмотра документ Проект.docx
Введение 2
Сборка робота 4
Основные компоненты шагающего робота 5
Датчик освещённости 9
Ультразвуковой датчик 10
Датчик касания 10
Звуковой датчик 11
Заключение 12
Литература 13
Но большинство людей даже и не догадываются о принципах работы окружающих их роботов. А это, прежде всего, отображает общий научный и культурный спектр знаний нашего общества, имевшего очень высокие показатели научной грамоты среди людей во времена СССР.
Именно поэтому у меня появилось желание создать собственного робота и разобраться, с помощью чего и как работают его основные компоненты.
Цель проекта: изучить физические законы в робототехнике на примере сконструированного робота.
Реализация цели обусловила решение следующих задач :
Найти инструкцию сборки шагающего робота.
Поэтапно собрать робота.
Разработать необходимое программное обеспечение.
Описать составные части робота и датчики с физической точки зрения.
Новизна работы заключается в том, что впервые конструируется робот с целью наглядно показать основные принципы его работы.
Практическая значимость заключается в возможности использовать модель шагающего робота на уроках физики, информатики, на кружках по кибернетике и робототехнике не только для демонстрации возможностей робота, но и для изучения его конструкции и принципов работы, такая модель может использоваться как учителем, так и учащимися. Кроме того, интересная конструкция и широкие возможности робота могут привлечь младших школьников, мотивировать их для изучения естественнонаучных предметов основного школьного курса, для самостоятельного изучения научно-популярной литературы, фильмов.
Конструкторский набор, из которого предстояло собирать робота, был определён однозначно – это LEGOMindstormsNXT 2.0 Education 9797 . Достоинства такого набора очевидны:
Доступность. Набор, в отличие от похожих, доступен в Росси и не нужно прикладывать усилия для закупки конструктора за границей;
Возможность собирать различных роботов – начиная от механических змей и погрузчиков и заканчивая решателями судоку и электрогитарами;
Многофункциональность. В дополнение к одному набору прилагается дополнительный, содержащий часто используемые детали, что позволяет из одного конструктора создавать несколько роботов;
Сборка робота
Основные этапы сборки шагающего робота AlphaRex :
Конструирование двух стоп – основной опорной части каркаса
Сборка ног робота
Постановка двух сервомоторов для каждой из ног, сборка передач (шестерни)
Сборка передач и постановка сервомотора для других движущихся частей – рук и головы
Крепление к микропроцессору
Организация проводного соединения сервомоторов и датчиков к микропроцессору
Шагающий робот AlphaRex , в общей сложности был собран за 1,5 недели двухчасовых занятий.
В продолжение всей сборки вёлся постоянный самоконтроль и сравнение с иллюстрациями в инструкции. Проблем при конструировании не возникло.
Основные компоненты шагающего робота
Характеристики процессора NXT представлены в таблице:
Atmel 32-Bit ARM AT91SAM7S256
48 Мгц .
256 K б FLASH- памяти
64 K б оперативной памяти
Порты и датчики
4 порта
Одинаковые
Цифровые, скорость передачи данных: 9600 бит/сек. (IIC)
Порты для моторов
3, с датчиком оборотов
Скорость соединения USB
Управление и связь с устройствами на ОС
ЖК, матричный, чёрно-белый
100 x 64 Пикселей
Bluetooth, USB 2.0
Возможности процессора и сопроцессор, благодаря высокой скорости передачи данных по портам, позволяют использовать полностью возможности робота по управлению двигателями и датчиками, а память даёт возможность записывать на робота большое количество программ.[1]
Три сервомотора дают роботу возможность двигаться. На рисунке представлена конструкция сервомотора.

Особенностью данного сервомотора составляет встроенный сенсор вращения (тахометр), измеряющий вращение мотора в градусах или поворотах (с точностью до +/- одного градуса), основанный на измерении длительности одного оборота, либо временного интервала между смежными импульсами, формируемыми в течение одного оборота и вычисления обратной функции
F = 1/ T ,
Где F — частота вращения; T — период (длительность одного оборота). Одно вращение состоит из 360 градусов, поэтому, если установить мотор на вращение 180 градусов, в результате ось сделает пол-оборота. Кроме того, тахометр позволяет устанавливать различные скорости для моторов (выставлением различных параметров мощности в программном обеспечении).
Непосредственно, мотор представляет собой электрический двигатель, в котором электрическая энергия преобразуется в механическую, побочным эффектом при этом является выделение тепла. Двигатель работает на основе эффекта , обнаруженного Майклом Фарадеем еще в 1821 году (электромагнитная индукция – явление возникновения электрического тока в замкнутом контуре при изменении магнитного потока , проходящего через него ). Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение, что является основным принципом работы любой электрической машины. Энергию сервомоторы получают либо от аккумулятора ( DC ), который идёт в комплекте, либо от батареек (6х АА/ LR 6;1,5 В; DC ).[2]
Ещё одной деталью сервомотора и всего корпуса робота являются шестерни. Зубчатые колёса – основная деталь зубчатой передачи в виде диска с зубьями на цилиндрической или конической поверхности, входящими в зацепление с зубьями другого зубчатого колеса. Шестерни обычно используются парами с разным числом зубьев с целью преобразования вращающего момента и числа оборотов валов на входе и выходе. Колесо, к которому вращающий момент подводится извне, называется ведущим, а колесо, с которого момент снимается — ведомым. Если диаметр ведущего колеса меньше, то вращающий момент ведомого колеса увеличивается за счёт пропорционального уменьшения скорости вращения, и наоборот. В соответствии с передаточным отношением, увеличение крутящего момента будет вызывать пропорциональное уменьшение угловой скорости вращения ведомой шестерни, а их произведение — механическая мощность — останется неизменным. Данное соотношение справедливо лишь для идеального случая, не учитывающего потери на трение и другие эффекты, характерные для реальных устройств.[3]
Датчик освещённости
Датчик цвета является одним из датчиков, заменяющих роботу зрение (другой – ультразвуковой). Датчик освещённости содержит в себе красный светодиод, который можно включить и выключить программно, а также фототранзистор, который, собственно и измеряет яркость попадающего на него света. Включенная подсветка позволяет измерять свет, отражённый от поверхности объекта, в то время как при выключенной подсветке фотоэлемент измеряет яркость окружающего освещения.
Фототранзистор — оптоэлектронный полупроводниковый прибор, вариант биполярного транзистора. Отличается от классического варианта тем, что область базы доступна для светового облучения, за счёт чего появляется возможность управлять усилением электрического тока с помощью оптического излучения.[4]
Биполярный фототранзистор — полупроводниковый прибор с двумя p-n переходами — предназначен для преобразования светового потока в электрический ток. При освещении фототранзистора в его базе генерируется электронно-дырочные пары. Неосновные носители зарядов переходят в область коллектора и частично в область эмиттера. При этом потенциалы эмиттера и коллектора относительно базы изменяются. Эмиттерный переход смещается в прямом направлении, и даже небольшое изменение его потенциала вызывает большое изменение тока коллектора, то есть фототранзистор является усилителем. Ток коллектора освещенного фототранзистора оказывается достаточно большим — отношение светового потока к темновому велико (несколько сотен). Фототранзисторы обладают значительной большей, чем фотодиоды, чувствительностью — порядка сотни миллиампер на люмен. Биполярный фототранзистор подобен обычному биполярному транзистору, между выводами коллектора и базы которого включен фотодиод. Таким образом, ток фотодиода оказывается током фототранзистора и создает усиленный в n раз ток в цепи коллектора. Если на фототранзистор подается только электрический сигнал, его параметры почти не отличаются от параметров обычного транзистора.[3]
Ультразвуковой датчик
Ультразвуковой сенсор позволяет роботу видеть и обнаруживать объекты. При помощи этого датчика робот может обойти препятствия, оценить и измерить расстояние, а также зафиксировать движение объекта.
Ультразвуковой сенсор может измерять расстояние от 0 до 255 сантиметров с точностью +/- 3 см. Принцип этого датчика тот же, что принцип локаторов летучей мыши: он измеряет расстояние, которое потребовалось звуковой волне для возвращения после отражения от объекта. Лучше всего определяются крупные предметы с твёрдыми поверхностями. Нами также было учтено то, что два и более ультразвуковых датчика, работающих в одном помещении, могут интерферировать и снижать точность результатов, поэтому мы не тестировали ультразвуковой сенсор, когда кто-либо собирал другого робота в классе. Интерференция – взаимное увеличение или уменьшение результирующей амплитуды двух или нескольких звуковых волн при их наложении друг на друга, сопровождается чередованием максимумов (пучностей) и минимумов (узлов) интенсивности в пространстве.[4]
Датчик касания
В современных датчиках силы наиболее часто применяется методизмерения деформации упругого элемента системы, вызванной неизвестной силой. В большинстве датчиков не происходит прямого преобразования силы в электрический сигнал. Для этого обычно требуется несколько промежуточных этапов. Поэтому, как правило, датчики силы являются составными устройствами. Например, датчик силы часто представляетсобой комбинацию преобразователя сила-перемещение и детектора положения (перемещения).
Это может быть простая спиральная пружина, уменьшение длины которой, вызванное приложенной силой сжатия, будет пропорционально ее коэффициенту упругости.
На рисунке показан датчик, состоящий из пружины и детектора перемещений, реализованного на основе линейно регулируемого дифференциального трансформатора (ЛРДТ). В линейном диапазоне изменения длины пружины напряжение на выходе ЛРДТ пропорционально приложенной силе.[3]
Звуковой датчик
Датчик звука предназначен для определения уровня громкости звука: тихий он или громкий. Датчик звука определяет как нормативный уровень громкости [дБ], так и скорректированный уровень громкости [дБA].дБА – это те звуки, которые могут слышать уши человека.дБ – все реальные звуки, включая те, которые не улавливает человеческое ухо, слишком высокие или слишком низкие. Датчик звука может измерять уровень звукового давления вплоть до 90 дБ – что примерно соответствует шуму, издаваемому газонокосилкой. Показания датчика звука отображаются на экране NXT в процентах (%)от максимального уровня, который датчик может измерить. Для сравнения: 4–5% соответствует уровню шума в тихой жилой комнате; 5–10% – обычная речь, слышимая на среднем расстоянии; 10–30% – нормальный разговор вблизи датчика или музыка, воспроизводимая на нормальном уровне громкости; 30–100% – громкие крики или музыка. Колебания давления воздуха (звук) воздействуют на мембрану и приводят в движение токопровод. Когда токопровод пересекает силовые линии магнитного поля, в нём наводится ЭДС индукции. ЭДС индукции пропорциональна как амплитуде колебаний мембраны, так и частоте колебаний.[5]
Робототехника все чаще применяется в предметах естественно-математического цикла. К ним относятся математика, информатика, физика, химия, биология. Возможно применение элементов робототехники для проведения лабораторных работ и экспериментов по физике. Это позволяет сделать занятия более наглядными и интересными.
Робототехника является универсальным инструментом для обучения.

робототехника и физика
Она гармонично сочетается и с дополнительным образованием, и для внеурочной деятельности, для обучения предметам школьной программы. При этом полностью выполняются требования ФГОС. Робототехника подходит для всех возрастов — от дошкольников до профессионального образования.
Проведение занятий с применением робототехнических конструкторов является обучением в процессе игры и в то же время техническим творчеством. Это позволяет воспитать активных, заинтересованных своим делом, самостоятельных людей.
Использование робототехники как инновационной методики на занятиях в обычных школах, в детских садах, учреждениях дополнительного образования дают возможность равного доступа детей всех социальных слоев к новейшим образовательным технологиям.
Образовательная робототехника предоставляет шанс на раннем этапе выявить техническую предрасположенность учащихся и совершенствовать их в этом направлении.
Где применяется робототехника
Робототехнику можно применять во всех видах образования:
- в начальном
- в основном общем образовании
- в среднем (полном) общем образовании
- в начальном профессиональном образовании
- в специальном (коррекционном) обучении
Необходимо создать такие условия для обучающихся, при которых формируется интерес к инженерной и информационной отраслям. Очевидно, что робототехника должна интегрироваться в основную образовательную программу как дисциплина дополнительного образования.

книга для учителя
Она не связана с учебными предметами напрямую, но у нее есть свой набор задач, позволяющий развивать творческое мышление и обеспечить опережающее обучение.
Возможности применения робототехники на лабораторных работах по физике
В настоящее время существует множество робототехнических наборов Lego, Arduino, Tetrix, Vex и другие, в которых есть большое количество датчиков. Это датчики света и освещенности, ультразвуковые датчики, инфракрасные датчики, датчики температуры, гироскопические датчики и многие другие.

Lego и Arduino
При помощи каждого из этих датчиков можно проводить физические эксперименты. Есть три основных варианта применения робототехники Лего в физике и лабораторных работах
1.Физические эксперименты

физические эксперименты
К ним относятся:
- виды работы и энергии
- термодинамика
- механика и оптика
Дается учебный план занятий. Проведение экспериментов рассчитаны на занятия 45 или 90 минут. В это время также входит обязательная теоретическая составляющая урока. В экспериментах применены модели Lego EV3 в которых не требуется большое количества времени для сборки конструкции и последующего программирования.
Какое оборудование и материалы нужно использовать

возобновляемые источники энергии
Для каждого базового набора EV3 требуется один набор и один датчик температуры NXT. Программное обеспечение можно бесплатно скачать на официальном сайте Лего. После установки на компьютер по приведенным схемам собирается роботизированная платформа по интересующей теме.

датчик цвета и ультразвуковой датчик Lego
Есть объяснение темы, рабочая программа для загрузки, рекомендации по использованию модели, непосредственно сам опыт с измерениями, анализ, выводы и т.д. Все шаги можно документировать непосредственно в среде программирования LabVIEW.
Всего существует на данный момент 4 темы:
1. Энергия
2. Сила и движение
3. Свет
4. Теплота и температура

выбор темы
Также есть много информации для изучения в виде PDF файлов.
2. Применение блока Lego EV3 и встроенного приложения
Вторым методом является проведение эксперимента с использованием только блока EV3, датчиков и моторов, не прибегая к среде программирования с использованием компьютера. Непосредственно на самом блоке есть встроенная среда программирования, где можно проводить эксперименты и документировать результаты.

интерфейс модуля EV3
Модуль EV3 поставляется с простым в использовании приложением для документирования данных. Это приложение установлено непосредственно на модуле. Открывая это приложение слева можно увидеть область графика.
Подключив к модулю EV3 датчик можно увидеть на графике текущие показания датчика. Если подключить мотор, то это будут показания, поступающие с энкодера (встроенного датчика вращения).
С правой стороны от графика будут отображены значения (начиная сверху):
- текущее показание
- самое высокое показание
- самое низкое показание и среднее показание
Длительность проведения эксперимента будет отображаться, только когда выполняется эксперимент. Более подробно все шаги по настройке и проведению эксперимента описаны в руководстве пользователя, которое также встроено в среду программирования Лего.
3.Применение среды программирования Lego EV3
Третий метод проведения экспериментов использует создание эксперимента в среде программирования Lego EV3. Для этого нужно соединить блок Lego EV3 с компьютером, к блоку подсоединить интересующие нас датчики для измерений. После этого указываем время проведения эксперимента, частоту регистрации данных.
Затем нужно настроить датчики по:
Также можно выбрать цвет линии для графика. Всего можно к блоку EV3 подключить четыре сервомотора (к портам A, B, C, D) и четыре датчика (к портам 1, 2, 3, 4). У моторов можно измерять параметры вращения, у датчиков параметры цвета, освещенности, температуры и т.д.
Если блок Lego EV3 включен, произведено соединение с компьютером и открыта страница аппаратного обеспечения, то параметры датчиков будут автоматически определены.

создание эксперимента
Также большое количество экспериментов можно произвести с применением контроллера Ардуно. Для этого типа контроллеров также существует большое количество датчиков. Но программирование происходит на языке C++ и, как правило, это текстовое программирование.
Программирование в среде Lego EV3 является визуальным с использованием пиктограмм. Поэтому оно более простое для понимания. Также присутствуют встроенные приложения с готовыми программами и справками. Поэтому можно быстро приступить к проведению различных экспериментов.
Применение элементов робототехники значительно наращивает и раздвигает возможности для выполнения лабораторных работ по физике.

В последние годы в Российском образовании всё более популярной становится образовательная робототехника. Сотни школ используют конструкторы нового поколения в дополнительном и основном образовании. Многие практики робототехники рассматривают образовательную робототехнику как новую педагогическую технологию, направленную на приобщение детей и молодёжи к техническому творчеству, развитию навыков конструирования, моделирования и программирования.
Во многих регионах России образовательная робототехника успешно развивается на протяжении уже нескольких лет. Среди таких регионов Московская область, Санкт-Петербург, Архангельск, Челябинск, Екатеринбург, Курган, Нижний Новгород, Новосибирск и многие другие. Робототехника становится сегодня популярным и эффективным средством в изучении информатики, физики, технологии, химии, биологии и других предметов, что позволяет достигать высоких результатов в обучении и мотивации школьников к выбору профессий инженерно-технического профиля.
Мы определяем следующие педагогические цели использования робототехники в преподавании физики:
1) демонстрация возможностей робототехники как одного из ключевых направлений научно-технического прогресса;
2) демонстрация роли физики в проектировании и использовании современной техники;
3) повышение качества образовательной деятельности:
- углубление и расширение предметного знания,
- развитие экспериментальных умений и навыков,
- совершенствование знаний в области прикладной физики,
- формирование умений и навыков в сфере технического проектирования, моделирования и конструирования;
4) развитие у детей мотивации изучения предмета, в том числе познавательного интереса;
5) усиление предпрофильной и профильной подготовки учащихся, их ориентация на профессии инженерно-технического профиля.
В связи с появлением новых возможностей в организации учебного процесса с использованием роботов можно выделить следующие компоненты учебного процесса, в которых появляется робототехника:
2. Элективные курсы, клубная и кружковая формы работы.
3. Исследования, проектная работа, участие в НПК, конкурсах, включая дистанционные и сетевые формы.
При этом, по нашему мнению, школьник должен иметь возможность самоопределиться в выборе уровня знакомства с робототехникой. Либо ему будет достаточно базового уровня, который предполагает в основном урочные формы работы, либо он будет знакомиться с робототехникой по расширенному или углублённому варианту, выбирая элективные курсы, проекты и другие формы (рис. 1).
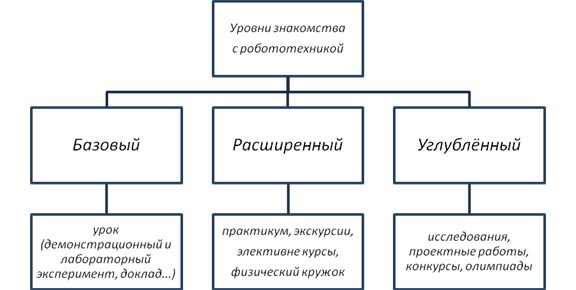
Рис.1. Уровни знакомства с робототехникой в процессе изучения физики
Для наиболее полного достижения поставленных целей использования робототехники, роботы в школьном курсе физики должны быть представлены не только как средство практической деятельности школьников, но и как объект теоретического изучения. Большинство датчиков робототехнических наборов, а также исполнительных элементов роботов имеют физические принципы действия, которые изучаются в школьном курсе физики, поэтому, например, при изучении соответствующих тем целесообразно акцентировать внимание на практическое использование законов в современной технической области. Таким образом, нами предлагается следующая система использования учебных роботов в предметной области физики:
Робот как объект изучения
Изучение принципа работы элементной базы робота
Датчики, приводы (электропривод, гидропривод, пневмопривод), светоиндикация, механические передачи, параметры электрических цепей робототехнического оборудования и др.
Роль робота в современных научных исследованиях
Космические исследования, исследования глубин, радиационная разведка, исследование микромира и др.
Роль робота в проектировании и использовании современной техники
Промышленные роботы, роботы на транспорте, использование роботов в экстремальных условиях, медицине, сфере услуг.
Робот как средство изучения
Робот как средство измерения
Использование датчиков базового конструктора и совместимых датчиков (Vernier, HiTechnic и др.) Конструктор используются как измерительная система с обработкой и фиксацией результатов в различных видах.
Робот как средство постановки автоматизированного эксперимента
· Сборка демонстрационных и лабораторных установок из робототехнического оборудования
· Интеграция оборудования кабинета физики и робототехнического оборудования
Робот как средство моделирования
· Моделирование промышленных, бытовых, транспортных и других видов устройств;
· моделирование явлений природы.
Робот как средство творческого проектирования
Робот как средство технической модернизации существующих устройств
Совместное использование роботов с другими системами, адаптация робота к новым условиям.
Проектирование новых роботизированных устройств
Проектирование новых видов датчиков и других систем, вымышленных устройств из будущего и др.
В некоторых направлениях представленной системы имеются достаточно интересные методические наработки как у нас в стране, так и за рубежом. В последние годы появилось достаточно много публикаций, знакомящих с опытом внедрения робототехники в учебный процесс. Вместе с тем, ряд учебных пособий по организации курсов и кружков и других видов внеклассной работы также может быть полезен при организации предметной работы по физике.
Первая: раздел «Анатомия промышленного робота имеет подробное описание механических принципов функционирования манипуляторов и движущихся роботов.
Третья: в пособии раскрываются физические принципы работы некоторых видов датчиков, а также система управления учебного робота 90-х годов: электронные элементы и узлы робота от полупроводниковых приборов до микросхем, рассмотрена работа электропривода с ЧПУ для учебного робота.
В заключительной части учебного пособия содержится описание использования промышленных роботов, роботов предназначенных для работы в экстремальных условиях и перспективы развития робототехники.
Первый аспект: раскрываются вопросы инженерной психологии и взаимодействия машины и человека. Описана взаимосвязь работы создателей роботов и биокибернетиков в середине XX века, дан анализ развития теории биологического моделирования (на основе работ Н. А. Умова, Д. А. Гольдгаммера, А. В Немилова).
Третий аспект: описана история развития автоматизации производства с 30-х по 60-е годы XX столетия в нашей стране и в США, а также теория систем регулирования (Г. В. Щипанов). Самые различные примеры автоматизации, возникшие в это время можно встретить в окружающей жизни. Например, рассматриваются разомкнутая и замкнутая системы регулирования (отличаются наличием и отсутствием наблюдателя, участвующего в регулировании). Эти процессы в истории развития автоматики назывались процессами управления и регулирования. Приведён пример работы системы стабилизации температуры в помещении. Рассмотрены автоматические технические устройства до появления робототехники, которые состояли из следующих функциональных элементов: датчика, который выявляет воздействие; логики, сравнивающей регулируемую величину с заданным значением; усилителя и сервопривода. Сервопривод и усилитель активизируют связи и управляют исполнительным устройством. Первые системы автоматизации устанавливались на паровые поршневые машины, затем паровые турбины, двигатели внутреннего сгорания, а впоследствии и электрические машины.
Интенсивное развитие образовательной робототехники началось с появления в 1998 году специализированных робототехнических наборов компании LEGO под названием LEGO Mindstorms с программируемым блоком RCX. В 2006 году начался выпуск второго поколения LEGO Mindstorms с блоком NXT, а в 2013 году третьего поколения с блоком EV3. На сегодняшний день в продаже имеется около десятка различных робототехнических конструкторов различных производителей для различного возраста школьников и студентов.
Сегодня в сети Интернет появляется большое количество педагогических публикаций с опытом использования различных аспектов робототехники в учебном процессе. Интерес детей и учителей к робототехнике растёт, так же как и возможности приобретения оборудования нового поколения.
Подводя итоги, можно отметить, что возможности применения робототехнических конструкторов в учебном процессе достаточно широки и их реализация требует от учителя методической и технической подготовки. Соотнося задачи школьного образования с перспективами автоматизации и роботизации современного производства, необходимо координировать усилия образовательных учреждений, промышленных предприятий, вузов, органов управления образованием для эффективного развития технического мышления школьников, целенаправленного развития способностей инженерно-технического направления.
1. Алексеев А. П. и др. Робототехника: учебное пособии для 8–9 классов средней школы./А. П. Алексеев, А. Н. Богатырев, В. А. Серенко. — М., Просвещение. 1993. — 160с.
2. Боголюбова А. Н. Популярно о робототехнике/ А. Н. Боголюбова, Д. А. Никитина, — Киев: Наук. Думка, 1989. — 200с.
3. Филиппов С. А. Робототехника для детей и родителей./ С. А. Филиппов–3-е изд. — СПб.: Наука, 2013.
5. Копосов Д. Г. Первый шаг в робототехнику: практикум для 5–6 классов. / Д. Г. Копосов, — БИНОМ. Лаборатория знаний, 2012, — 286с.
6. Белиовская Л. Г. Программируем микрокомпьютер NXT в LabVIEW/ Л. Г. Белиовская, А. Е. Белиовский, — М: ДМК-пресс, 2013 г.
7. Белиовская Л. Г. Самостоятельный физический эксперимент в современном типовом и цифровом кабинетах физики при реализации Федерального государственного образовательного стандарта/ Л. Г. Белиовская // Учительская газета. Независимое педагогическое издание, № 23 (10416) от 5 июня 2012 г.
15. Ершов М. Г. Использование элементов робототехники при изучении физики в общеобразовательной школе. [Текст]// XXI век — время молодых. Материалы четвертой открытой научно- практической конференции студентов, аспирантов и молодых ученых 19 мая 2011г., г. Пермь: ПГПУ, 2011.- С.55- 59.2011
Основные термины (генерируются автоматически): LEGO, учебный процесс, образовательная робототехника, NXT, робототехника, робот, физик, преподавание физики, работа, учебное пособие.
Похожие статьи
Роль робототехники в образовательном процессе
LEGO, учебный процесс, образовательная робототехника, NXT, робототехника, физик, робот, преподавание физики, учебное пособие, работа. Реализация курса робототехники в общеобразовательной школе. Различные модели конструкторов Lego и робототехнические.
Обзор программируемого комплекта робототехники Lego
Образовательная робототехника — сравнительно новая область, как в технике, так и в педагогической науке и занимается проблемами организации учебного процесса и внеурочной деятельности по обучению роботам.
Развитие робототехники в школе | Статья в сборнике.
Lego роботы встраиваются в учебный процесс.
И вопрос внедрения робототехники в учебный процесс начиная с начальной школы актуален.
На уроках информатики решать задачи физики, математики и т.д. Модели Конструктора ПервоРобота NXT дают.
Робототехника: конструирование и программирование
Овсяницкая, Л. Ю. Пропорциональное управление роботом Lego Mindstorms EV3 / Л. Ю
Основные термины (генерируются автоматически): самостоятельная работа, NXT, датчик.
LEGO, робототехника, учебный процесс, набор.
Роль робототехники в образовательном процессе. LEGO, робототехника, учебный процесс, набор, научно-технический прогресс, искусственный интеллект, образовательный процесс, внеурочная деятельность, технологическое образование, образовательная робототехника.
Возможности использования конструктора LEGO в учебном.
Во многих регионах России образовательная робототехника успешно развивается на протяжении уже нескольких лет.
В 2014 году в комплекте с оборудованием для кабинета физики в нашу школу были поставлены LEGOMINDSTORMS NXT конструкторы.
Конструкторы lego и робототехника в современном школьном.
Робототехника (от слов робот и техника; англ. robotics) — прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Изучение робототехники в учебном процессе позволит применять самые передовые технологии и современные учебные.
Ключевые слова: образовательная робототехника, физика.
физика, образовательная робототехника, инженерное мышление.
Возможности использования образовательной робототехники в преподавании физики.
Поэтому, внедрение робототехники в учебный процесс и внеурочное время приобретают все большую.
Робототехника как инструмент повышения качества освоения.
LEGO, образовательная робототехника, VEX, учебный процесс, дополнительное образование, профессиональное образование, робототехническое оборудование, техническое творчество, робототехника.
Удивительный мир робототехники и его многообещающее будущее

Робототехника - это отрасль науки и техники, которая занимается проектированием, конструированием и эксплуатацией роботов, а также компьютерных систем для их управления, сенсорной обратной связи и обработки информации.
Хотя первые роботы были придуманы много лет назад, реальный потенциал полностью автономной робототехники был реализован во второй половине XX века.
Вы также можете прочитать: История робототехники
Применение робототехники
Основная цель робототехники заключалась в том, чтобы просто выполнять набор сложных задач, в основном на промышленных предприятиях, но теперь она распространилась на множество областей.
Сегодня мы можем выделить следующие сферы применения робототехники:
- Военные роботы: Само собой разумеется, что военные операции сопряжены с высоким уровнем риска и, следовательно, имеет смысл использовать машины для спасения человеческих жизней. Существует множество разновидностей военных роботов, а именно БПЛА (беспилотные летательные аппараты, также известные как дроны), UGV (беспилотные наземные транспортные средства) и UUV (беспилотные подводные аппараты). Они используются для обнаружения террористов и проведения атак. Есть даже четвероногие роботы для переноски тяжелого оружия и боеприпасов.

- Образование: многие школы и институты используют роботов для обучения и вовлечения студентов в программы STEM (наука, технология, инженерия и математика). Студентам доступно множество наборов, с помощью которых они могут многое узнать о робототехнике. Не только это, но и детям с аутизмом и другими поведенческими расстройствами также удобнее взаимодействовать с роботами и получать знания по различным предметам.
- Здравоохранение: Разрабатываются различные виды роботов, которые будут использоваться в больницах, чтобы помочь врачам и медсестрам в уходе за пациентами. Есть роботы, которые могут продезинфицировать место, позаботиться о потребностях пациентов и даже удалить нежелательные элементы из тела без хирургического вмешательства. Существует также робот по имени да Винчи, который помогает с точностью выполнять операции, которые сложно выполнить вручную.
- Сельское хозяйство: на сельскохозяйственных полях используются малогабаритные роботы, оснащенные камерой и датчиками. Они перемещаются по полям и обнаруживают сорняки и другие виды инфекций. Датчики помогают наносить химические средства только на пораженные участки, тем самым защищая окружающую среду от выброса вредных химикатов в воздух.

- Производство: Очевидно, промышленные роботы широко используются на промышленных предприятиях. Такие факторы, как отрицательный прирост населения в некоторых странах, незаинтересованность молодых работников заниматься заводской работой и экономия времени при использовании роботизированного оборудования, определяют подъем интереса к промышленным роботам. Самая распространенная иллюстрация, которую можно здесь привести, - это автомобильные заводы, которые вместе с рабочими производят автомобили.

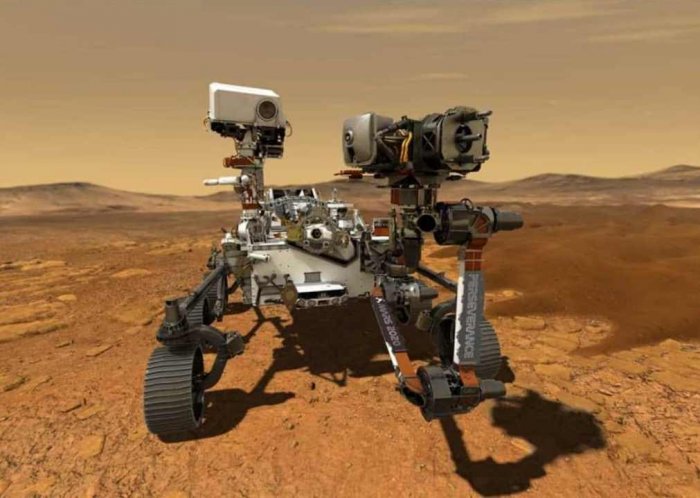
- Космос: несколько стран построили собственных космических роботов различных форм и размеров, чтобы исследовать космос. Некоторые из них не могут даже контролировать свой собственный вес на Земле, но эффективно работают в космосе с отличной ловкостью.
Применение промышленных роботов:
Виды роботов
От тяжелых, металлических и проводных машин, известных как супер роботы, до крошечных автономных устройств, известных как наноботы, область робототехники была исследована в значительной степени. Ниже перечислены наиболее интересные виды роботов, которые были разработаны в последнее время.
Давайте посмотрим список некоторых интересных форм роботов:
Экзоскелеты: это технология, в которой электронный костюм для тела предлагает пользователю движение конечностей и увеличивает силу.
В первую очередь они используются в военных целях для подъема тяжелых грузов и для пациентов с травмами позвоночника.
Пример: Ekso Bionics разработала эксо-костюмы для всего тела, которые могут носить люди, пострадавшие от инсульта или травмы спинного мозга, чтобы снова встать на ноги.
Первоначально разработанные для солдат, эти костюмы также используются в различных реабилитационных клиниках для пациентов со слабостью нижних конечностей.

Гуманоидные роботы: это роботы с телом, напоминающим человеческое, с головой, двумя руками, туловищем и двумя ногами.
Подкатегория гуманоидов известна как андроиды, которые внешне очень похожи на человека с точки зрения эстетики и могут имитировать человеческое поведение.
Пример: Атлас - один из самых продвинутых роботов-гуманоидов, разработанный компанией Boston Dynamics, принадлежащей Google.
Хотя это не андроид с человеческими кожей и выражениями лица, но он может делать много интересного. Он может ходить по снегу и восстанавливать равновесие, как и мы, открывать двери, поднимать ящики и даже ощущать предметы, лежащие перед ним.

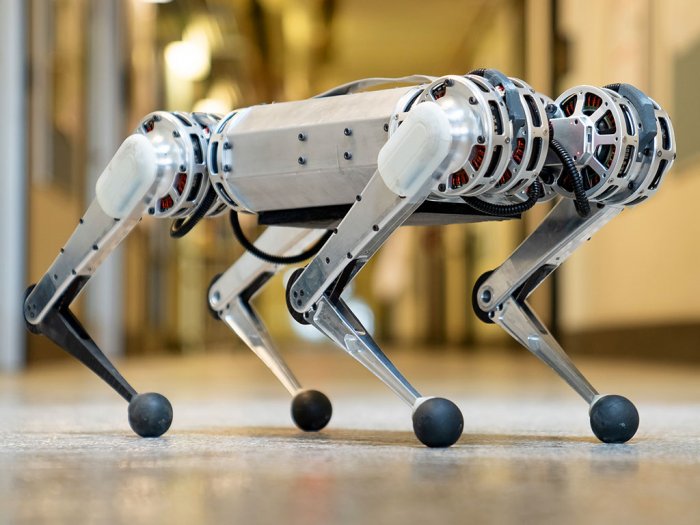
Роботы-животные: робототехника, вдохновленная биологией, - это довольно новая категория робототехники, в которой естественные биологические характеристики живых существ воспроизводятся в виде моделей роботов, вдохновленных животными.
Наблюдаются такие черты животных, как то, как они прыгают, карабкаются, ходят или ползут, а затем предпринимаются попытки воспроизвести их в настройке машины.
Пример: существует робот по имени Cheetah, разработанный Boston Dynamics, который может скакать со скоростью более 45 км в час.
В Массачусетском технологическом институте разработан аналогичный робот с таким же названием, который может обнаруживать препятствия и перепрыгивать через них при беге со скоростью 20 км в час.
Роботы-спасатели. Одним из наиболее логичных и разумных способов использования роботов является их развертывание в ситуациях, связанных с ликвидацией последствий стихийных бедствий при проведении спасательных операций. Требуется много мужества, а также усилия, чтобы найти и спасти жертв во время человеческой или техногенной катастрофы.
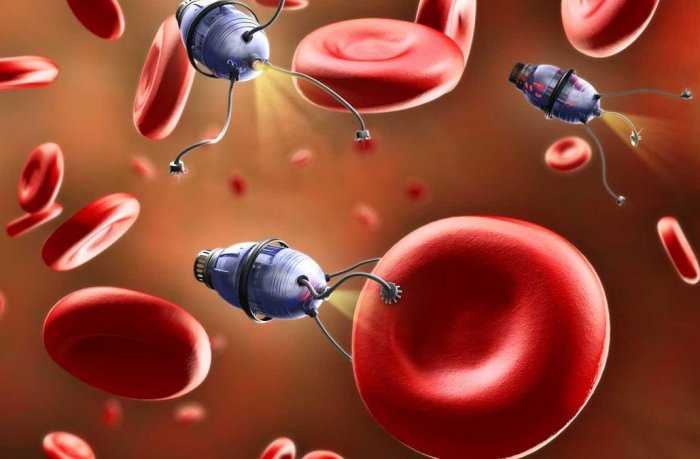
Наноботы: эти крошечные устройства предназначены для выполнения повторяющихся задач с точностью до наноразмеров в несколько нанометров или меньше. Они применяются при сборке и обслуживании сложных систем или для создания устройств, машин и схем на атомарном или молекулярном уровне. Кроме того, в сфере здравоохранения наноботов используют для доставки лекарств, уничтожения раковых клеток и т. д.
Пример: группа физиков из Университета Майнца в Германии сконструировала самый маленький в мире двигатель из одного атома. Он преобразует тепловую энергию в движение в самом маленьком масштабе, который мы когда-либо видели.
Рой: робототехника роя очень похожа на имитацию группы насекомых или муравьев в виде крошечных устройств, которые ползают вместе и формируют определенные конструкции. Их можно использовать в таких областях, как сельское хозяйство, спасательные работы или военные операции.
Пример: Гарвардский университет разработал рой из 1024 крошечных роботов, которые могли создавать определенные образования, такие как алфавиты, пятиконечные звезды и другие сложные конструкции, без какого-либо центрального интеллекта.

Сегодня существует множество роботов различных форм, размеров и конструкций, но все они подвержены определенным проблемам.
Например, роботы, участвующие в специальных конкурсах робототехники, эффективно выполняли задачи, подобные людям, но у них не было надлежащей системы для восприятия окружающей среды, и они просто следовали инструкциям оператора.
Кроме того, существуют мини-роботы, такие как Darwin, разработанные ROBOTIS, которые довольно хорошо умеют ходить, играть в футбол и даже вставать после падения, но их нельзя использовать в приложениях, требующих физической силы. Также есть робот по имени Cozmo от Anki, который даже может выражать чувства и играть, но это просто робот для развлечения.
Задачи, возложенные на роботов, включают в себя вождение автомобиля, прогулку по неровной дороге, расчистку мусора, поворот клапанов, подключение шлангов, открытие дверей, просверливание дыры, подъем по лестнице. Хотя это легко для людей, то же самое для роботов чрезвычайно сложно.
Чтобы робот сделал всего один шаг, требуются сотни и тысячи строк кода. Кроме того, люди начали ходить после нескольких лет эволюции, и даже сейчас, когда рождается ребенок, требуется больше года, чтобы научиться ходить в совершенстве. Итак, существует еще много технических проблем и препятствий, которые необходимо преодолеть ученым и инженерам.
Многие люди считают, что активная разработка и массовое внедрение роботов отнимут у людей множество рабочих мест. Однако Шерри Теркл, профессор Массачусетского технологического института, говорит, что роботы - это не заменители, а спутники людей, и их развитие скорее приведет к созданию дополнительных рабочих мест.
Еще одна проблема заключается в том, что нам нужно установить ограничение на характер задач, которые назначаются роботам. Логично использовать их в местах, которые слишком опасны для людей. Несомненно, технология всегда предлагала множество преимуществ и играет важную роль в нашей жизни, но не менее важно также определить пределы ее использования.
Читайте также: