
Человек как биомеханическая система доклад
Обновлено: 25.06.2024
Движения частей тела человека представляют собою перемещения в пространстве и времени, которые выполняются во многих суставах одновременно и последовательно. Движения в суставах по своей форме и характеру очень разнообразны, они зависят от действия множества приложенных сил. Все движения закономерно объединены в целостные организованные действия, которыми человек управляет при помощи мышц. Учитывая сложность движений человека, в биомеханике исследуют и механическую, и биологическую их стороны, причем обязательно в тесной взаимосвязи.
Оглавление
Введение
1 . Биомеханические характеристики как понятие
2 . Кинематические характеристики
3 . Динамические характеристики
4 . Распределение масс частей тела
Заключение
Литература
Файлы: 1 файл
к.р. биомеханика.doc
Федеральное агентство по образованию РФ
Тольяттинский государственный университет
Факультет физической культуры и спорта
КОНТРОЛЬНАЯ РАБОТА
Студента группы АФКз - 201
Преподаватель: Джалилов А.А.
Регистрационный номер_________ дата ______________________
1 . Биомеханические характеристики как понятие
2 . Кинематические характеристики
3 . Динамические характеристики
4 . Распределение масс частей тела
Движения частей тела человека представляют собою перемещения в пространстве и времени, которые выполняются во многих суставах одновременно и последовательно. Движения в суставах по своей форме и характеру очень разнообразны, они зависят от действия множества приложенных сил. Все движения закономерно объединены в целостные организованные действия, которыми человек управляет при помощи мышц. Учитывая сложность движений человека, в биомеханике исследуют и механическую, и биологическую их стороны, причем обязательно в тесной взаимосвязи.
Поскольку человек выполняет всегда осмысленные действия, его интересует, как можно достичь цели, насколько хорошо и легко это получается в данных условиях. Для того чтобы результат движения был лучше, и достичь его было бы легче, человек сознательно учитывает и использует условия, в которых осуществляется движение. Кроме того, он учится более совершенно выполнять движения. Биомеханика человека учитывает эти его способности, чем существенно отличается от биомеханики животных.
Таким образом, биомеханика человека изучает, какой способ и какие условия выполнения действий лучше и как овладеть ими. Общая задача изучения движений состоит в оценке эффективности приложения сил для достижения поставленной цели. Всякое изучение движений, в конечном счете, направлено на то, чтобы помочь лучше выполнять их. Прежде, чем приступить к разработке лучших способов действий, необходимо оценить уже существующие. Отсюда вытекает общая задача биомеханики, сводящаяся к оценке эффективности способов выполнения изучаемого движения. Биомеханика исследует, каким образом полученная механическая энергия движения и напряжения может приобрести рабочее применение. Рабочий эффект измеряется тем, как используется затраченная энергия. Для этого определяют, какие силы совершают полезную работу, каковы они по происхождению, когда и где приложены. То же самое должно быть известно о силах, которые производят вредную работу, снижающую эффективность полезных сил. Такое изучение дает возможность сделать выводы о том, как повысить эффективность действия. При решении общей задачи биомеханики возникают многочисленные частные задачи, не только предусматривающие непосредственную оценку эффективности, но и вытекающие из общей задачи и ей подчиненные.
1 . Биомеханические характеристики как понятие
Наблюдая движения человека, можно заметить, что многие их особенности все время изменяются. Изменяется положение звеньев тела, скорости движения и многое другое. Особенности (или признаки) движения позволяют разделить сложное движение на составные части, заметить, как они влияют одна на другую, как помогают достичь цели. Для этого и изучают характеристики движений человека.
Характеристики движений человека - это те особенности, или признаки, по которым движения различаются между собой.
Различают качественные и количественные характеристики.
Качественные характеристики - характеристики, описываемые только словами и не имеющие точной количественной меры (например: напряженно, свободно, плавно, мягко и др.).
Количественные характеристики - характеристики, которые измеряют или вычисляют, они имеют количественную меру.
Педагогу при проведении урока нечем и некогда измерять и регистрировать количественные характеристики. Ему приходится пользоваться качественными характеристиками, он проводит качественный биомеханический анализ движений каждого ученика.
Изучая движения с помощью измерительной и записывающей аппаратуры, получают количественные характеристики. Их обрабатывают, проводят вычисления для количественного биомеханического анализа. Конечно, затем должен следовать и качественный анализ, чтобы понять законы движения и использовать их в физическом воспитании. Хорошо владея навыками количественного анализа, в повседневной практической работе можно с успехом пользоваться только качественным анализом.
Вся сложность взаимосвязи характеристик, используемых для изучения движений человека, отражена в схеме.
Из нее видно, что наиболее важными являются те из них, которые характеризуют изменения положения тела и движения. К ним относятся кинематические и динамические характеристики. При этом следует отметить тот факт, что движения человека и предметов, перемещаемых им, можно заметить и измерить, только сравнивая их положения с положением выбранного для сравнения тела (тело отсчета) . Поэтому все движения человека в биомеханике рассматриваются как относительные .
Движение выражается в изменении с течением времени взаимного положения тел. Его можно наблюдать и отсчитывать только относительно других реальных тел (например, при прыжках в длину - относительно бруска) или условных (например, в старте яхт - относительно линии створа).
В зависимости от условий задачи, стоящей при изучении двигательного действия, выбирается та или иная система отсчета. Принято выделять:
- инерциальную систему отсчета (Земля, дорожка, лыжня) - движения их в данной системе незаметны при измерениях, т.е. изменениями скорости, ускорениями при решении данной задачи можно пренебречь;
- неинерциальная система отсчета - движущееся тело (скользящая лыжа, раскачивающиеся кольца), движение которого происходит с заметным ускорением, существенно влияющим на отсчет расстояния;
- соматическая система отсчета (тело человека) - движение звеньев рассматривается относительно туловища.
2 . Кинематические характеристики
Наблюдая сам факт движений, их внешнюю картину, различают пространственную форму (рисунок, узор) движений и их характер (изменение во времени - быстрее, чаще и т.п.).
Количественные характеристики, раскрывающие форму и характер движений, называются кинематическими. Они описывают движения в пространстве и во времени. Соответственно различают характеристики:
Пространственные характеристики позволяют определить, каково исходное и конечное положения при движении (координата), какова между ними разница, насколько они изменились (перемещение) и через какие промежуточные положения выполнялось движение (траектория), т.е. пространственные характеристики в целом определяют пространственную форму движений человека.
Координата точки — это пространственная мера местоположения точки относительно системы отсчета.
С точки зрения механики описать движение - это значит определить положение в любой момент времени, определить координаты опознавательных точек тела, по которым изучают ход движения в пространстве.
По координатам определяют, где находится изучаемая точка относительно начала отсчета, измеряя ее линейные координаты. Положение точки на линии, определяет одна координата, на плоскости - две, в пространстве - три.
Изучая движение нужно определить:
1) начальное положение, из которого движение начинается;
2) конечное положение, в котором движение заканчивается;
3) ряд мгновенных промежуточных положений, которые принимает тело при выполнении движения.
Перемещение точки - это пространственная мера изменения местоположения точки в данной системе отсчета.
Перемещение - величина векторная. Она характеризуется численным значением (модулем) и направлением, т.е. определяет размах и направление движения. Если после движения точка вернулась в исходное положение, перемещение равно нулю. Таким образом, перемещение есть не само движение, а лишь его окончательный результат - расстояние по прямой и направление от исходного до конечного положения.
Перемещение (линейное, в поступательном движении) измеряется разностью координат в моменты начала и окончания движения.
Перемещение тела при вращательном движении измеряется углом поворота - разностью угловых координат в одной и той же системе отсчета расстояний.
Траектория точки - это пространственная мера движения (воображаемый след движения точки). Траекторию определяют, устанавливая ее длину, кривизну и ориентацию в пространстве.
Пространственный рисунок движения точки дает ее траектория. Длина траектории показывает, каков путь точки.
Путь точки в прямолинейном движении равен расстоянию от исходного до конечного положения.
При криволинейном движении путь точки равен арифметической сумме модулей ее элементарных перемещений.
Кривизна траектории показывает, какова форма движения в пространстве. Чтобы определить кривизну траектории, измеряют радиус кривизны. Если траектория является дугой окружности, радиус кривизны постоянный. С увеличением кривизны ее радиус уменьшается, и, наоборот, с уменьшением кривизны, радиус увеличивается.
Ориентация траектории в пространстве при одной и той же ее форме может быть разная. Ориентацию определяют для прямолинейной траектории по координатам точек начального и конечного положений; для криволинейной траектории - по координатам этих двух точек и третьей точки, не лежащей с ними на одной прямой линии.
В совокупности ориентация, длина и кривизна траектории позволяют определить направление, размах и форму движения точки, а также начальное положение, конечное и все промежуточные.
Временные характеристики раскрывают движения во времени: когда оно началось и закончилось (момент времени), как долго длилось (длительность движения), как часто выполнялось движение (темп), как движения были построены во времени (ритм). Вместе с пространственно-временными характеристиками они определяют характер движений человека.
Момент времени — это временная мера положения точки тела и системы, определяемая промежутком времени до него от начала отсчета.
Момент времени определяют не только для начала и окончания движения, но и для других важных мгновенных положений. В первую очередь это моменты существенного изменения движения: заканчивается одна часть (фаза) движения и начинается следующая (например: отрыв стопы от опоры в беге — это момент окончания фазы отталкивания и начало фазы полета). По моментам времени определяют длительность движения.
Длительность движения - это его временная мера, которая измеряется разностью моментов времени окончания и начала движения.
Длительность движения представляет собой количество времени, прошедшее между двумя ограничивающими его моментами времени. Сами моменты (как границы между двумя смежными промежутками времени) длительности не имеют. Ясно, что измеряя длительность, пользуются одной и той же системой отсчета времени. Узнав путь точки и длительность ее движения, можно определить ее скорость. Зная длительность движений, определяют также их темп и ритм.
Темп движений — это временная мера повторности движений. Он измеряется количеством движений, повторяющихся в единицу времени (частота движений).
Темп - величина, обратная длительности движений. Чем больше длительность каждого движения, тем меньше темп, и наоборот. В циклических движениях темп может служить показателем совершенства техники.
Ритм движений - это временная мера соотношения частей движений. Он определяется по соотношению промежутков времени, затраченного на соответствующие части движения.
Ритм определяют как соотношение двух периодов времени (например: опоры и полета в беге) или длительности двух фаз периода (например: фазы амортизации и фазы отталкивания в опорном периоде). Можно говорить и о ритме ряда фаз (например: соотношение длительностей пяти фаз скользящего шага в лыжном ходе). Ритм бывает постоянным и переменным.
Пространственно-временные характеристики определяют, как изменяются положения и движения человека во времени.
Скорость точки — это пространственно-временная мера движения. Она определяет быстроту изменения положения точки в пространстве с изменением времени.
В поступательном движении скорость измеряется отношением пройденного пути (с учетом его направления) к затраченному времени; во вращательном движении - отношением угла поворота ко времени, за которое произошло вращение.
Ускорение точки - это пространственно-временная мера изменения движения, которая характеризует быстроту изменения скорости по величине и направлению.
Ускорение измеряется отношением изменения скорости (угловой скорости) к затраченному на него времени.
Различают ускорения точки: а) положительное, имеющее одинаковое направление со скоростью, - скорость возрастает; б) отрицательное, имеющее направление, противоположное направлению скорости, - скорость убывает; в) нормальная -скорость прежняя, изменяется направление.
3 . Динамические характеристики
Все движения человека и движимых им тел под действием сил изменяются по величине и направлению скорости. Чтобы раскрыть механизм движений (причины их возникновения и ход их изменения), исследуют динамические характеристики. К ним относятся инерционные характеристики (особенности самих движущихся тел), силовые (особенности взаимодействия тел) и энергетические (состояния и изменения работоспособности, биомеханических систем).
Инерционные характеристики раскрывают, каковы особенности тела человека и движимых им тел в их взаимодействиях. От инерционных характеристик зависит сохранение и изменение скорости.
Все физические тела обладают свойством инертности (или инерции), которое проявляется в сохранении движения, а также в особенностях изменения его под действием сил.
Строение и функции органов опоры и движения отличаются у человека большой сложностью. Этим обусловлено чрезвычайное многообразие возможностей положений и движений тела. Особенности тела человека, в частности двигательного аппарата, дают основание рассматривать тело в целом и его части как особые биомеханические системы.
Под биомеханическими системами понимается объединение живых объектов(например, органов, тканей), обладающих общими особенностями в проявлении законов механического движения, а также общими особенностями способов управления ими, участия в этих движениях или в их использовании. Различают системы активные(всего тела, двигательного аппарата) и пассивные (внутренних органов, мягких и жидких тканей). Особый интерес для изучения движений человека представляет биомеханическая система его двигательного аппарата, которая служит: а) источником энергии, б) механизмом для передачи усилий, в) объектом движения и г) системой управления.
МЕХАНИЧЕСКИЕ СВОЙСТВА ЗВЕНЬЕВ И ИХ СОЕДИНЕНИЙ
С позиций теории механизмов и машин1 части тела человека, имеющие подвижные соединения, принято рассматривать как звенья, составляющие биокинематические пары и цепи. Звенья цепей и их соединения находятся под действием приложенных к ним сил (нагрузок). В этих условиях проявляются особенности строения и функции (механические свойства) тела человека, влияющие на выполнение движений.
Виды нагрузок и характер их действия
Силы, приложенные к телу и в совокупности вызывающиеегодеформации2, называются нагрузками. (Деформация — изменение формы и размеров.)
К основным видам деформаций относятся: растяжение, сжатие, изгиб, кручение и сдвиг(рис. 2). Кости скелета и мягкие ткани при деформации под действием приложенных сил (нагрузок) противодействуют им.

Рис. 2. Нагрузки, вызывающие деформацию:
А — растяжение; б — сжатие; в — изгиб; г — кручение (ориг.). На схемах внизу — смещение элементов (по С. Э. Хайкипу)
Нагрузки, обусловливающие растяжение,—это самые характерные нагрузки для мягких тканей. Они возникают, например, при висах (см. рис. 2, а) или во время удержания груза в опущенных руках.
Нагрузки, создающие сжатие костей и хрящей, встречаются чаще всего при вертикальном положении тела на опоре. В этом случае на скелет действуют, с одной стороны, силы тяжести тела и вес внешних отягощений, а с другой —давление опоры (см. рис. 2, б).
Нагрузки, вызывающие изгиб, обычно встречаются, когда кости выполняют роль рычагов. В этих случаях приложенные к ним силы мышц и силы сопротивления направлены поперек костей и вызывают изгиб (см. рис. 2, в).
Наконец, нагрузки, обусловливающие кручение, чаще всего встречаются при вращательных движениях звена вокруг продольной оси (см. рис. 2, г).
По характеру действия различают нагрузки статические и динамические. Первые обычно постоянны по величине и, как правило, относительно невелики. Вторые возникают при движениях1, когда приложены силы инерции; они изменяются и могут нарастать до очень больших величин (например, нагрузки на сжатие после падения с большой высоты, нагрузки на изгиб при ударе). Такие динамические нагрузки, особенно действующие не в обычном направлении (например, при ударе поперек кости), могут превысить запас прочности того или иного звена, тогда произойдет повреждение двигательного аппарата.
Мышцы, суставные сумки, связки, а также хрящи, соединяющие кости скелета, деформируясь, уменьшают действие динамических нагрузок. Особенно большую роль в смягчении этого действия играют благодаря своей упругости мышцы. Если они недостаточно амортизируют нагрузку, то повреждаются связки и хрящи, а иногда даже и кости и сами мышцы.
Кости, как твердые тела, при передаче силвыполняют роль рычагов.
В биомеханике рассматривают в качестве твердых рычагов многие части тела (плечо, бедро и т. д.); считается, что они не изменяют своей длины, не сгибаются и не скручиваются.
Упругие деформации
Упругие деформации возникают в теле под действием нагрузки и исчезают при ее снятии.
Изменение формы (деформация) тел под действием приложенных к ним сил — свойство всех реальных тел2. Абсолютно твердых тел, которые не деформируются ни прикаких условиях, в природене существует.
В случае упругой деформации форма тела после прекращения действия деформирующей силы восстанавливается (например, стальная пружина) в отличие от пластической деформации, которая остается после снятия нагрузки, т. е. прежняя форма уже не восстанавливается (например, сырая глина). Таким образом, упругость — свойство тела самостоятельновосстанавливатьпосле деформации свою форму.
Упругая сила (сила упругого напряжения), противодействуя изменению формы, нарастает и, в конце концов, прекращает деформацию как останавливающая сила — в этот момент она становится равной деформирующей нагрузке. Эта же упругая сила при снятии деформирующей нагрузки восстанавливает прежнюю форму тела как восстанавливающая сила. Напряжение деформированного тела измеряется в килограммах на квадратный сантиметр его сечения3.
Рассмотрим зависимость между деформацией тела и напряжением (на примере мягкой стали). Можно выделить 4 основных варианта:
зона линейной упругости — напряжение прямо пропорционально деформации (идеальная пружина). После разгрузки деформация полностью исчезает;
зона нелинейной упругости — на равные приращения деформации приходятся все меньшие (как у мягкой стали) или все большие (как у мышцы) приращения напряжения; после разгрузки форма тела полностью восстанавливается;
зона пластической деформации — с увеличением деформации напряжение нарастает; после разгрузки форма тела восстанавливается не полностью (остаточная деформация);
зона разрушения — тело начинает разрушаться.
Зоны деформации различны у разных тел. Несколько упрощая, можно сказать, что у каждого тела в определенных условиях одна из зон больше других. Поэтому принято называть тело в зависимости от преобладающей зоны деформации линейно упругим, нелинейно упругим, пластическим или хрупким1. Как было сказано выше, после упругой деформации происходит полное восстановление формы (линия ЛО); после пластической может произойти некоторое ее восстановление (линия БВ), но будет еще остаточная деформация (05).
Мышцы как упругие тела обладают нелинейной упругостью и непременной жесткостью.
СОЕДИНЕНИЯ ЗВЕНЬЕВ
Соединения звеньев в биокинематических цепях обусловливают многообразие возможностей движении. От способа соединения и участия мышц в движениях зависит их направление и размах (пространственная. форма движений).
2.1. Кинематические пары
Кинематическая пара — это подвижное соединение двух звеньев. Способ соединения накладывает ограничения (связи) на относительное движение (степени связи); наличие подвижности в соединении предоставляет звеньям определенные возможности относительного движения (степени свободы движения).
Различают связи: а) геометрические (постоянные препятствия перемещению в каком-либо направлении) и б) кинематические (ограничениескорости, например, мышцей-антагонистом) .
Кинематические пары бывают: а) поступательные— одно звено может перемещаться поступательно по другому (например, боковые движения нижней челюсти); б) вращательные(па-пример, повороты в наиболее распространенных в теле человека цилиндрических и шаровидных суставах); в) винтовые с сочетанием поступательного и вращательного движений (например, в голеностопном суставе).Соединения, допускающие поворот звеньев пары, называют шарнирами.
Кинематические цепи
Кинематическая цепь — это последовательное или разветвленное соединение ряда кинематических пар.Кинематическую цепь, в которой конечное звено свободно, называют незамкнутой, а цепь, в которой нет свободного конечного звена,— замкнутой.
В каждом соединении незамкнутой цепи возможны изолированные движения. Они геометрически независимы от движений в других соединениях (если не учитывать взаимодействия мыши). Например, свободные конечности, когда их концевые звенья свободны (рис. 4, а), представляют незамкнутые цепи. Замкнутымикинематическими цепями в теле человека являются, например, грудина, ребро, позвоночник, ребро и снова грудина.
В замкнутой или замкнувшейся цепи невозможно одиночное изолированное движение, т. е. движение в одном соединении. Так, сгибая и выпрямляя ноги в выпаде, можно убедиться в том, что движение в любом суставе непременно вызывает движения и в других (см. рис. 4, б).
Таким образом, движения в незамкнутых цепях характеризуются относительной независимостью звеньев. В замкнутых же, а также замкнувшихся цепях движения одних звеньев влияют на движения даже отдаленных звеньев (помогают или мешают).
Например, сгибая руки в локтевых суставах в упоре лежа (замкнувшаяся цепь), можно или отводить плечи, или разгибать их в плечевых суставах. Тогда будут растягиваться либо приводящие мышцы плеча (большие грудные, широчайшие спины и др.), либо сгибатели (передние части дельтовидных). Теперь при разгибании рук в локтевых суставах приводящие мышцы или сгибатели плечевых суставов в зависимости от того, какие мышцы растянуты, могут передавать свое действие на локтевые суставы — способствовать разгибанию рук в этих суставах.
Передача действия мышц на смежные и отдаленные суставы характерна для замкнутых цепей и часто имеет место в подобных условиях работы мышц.
В замкнутых цепях возможностей движений меньше, но управление ими точнее, чем в незамкнутых.
Биомеханика человека как составная часть прикладных наук, изучающих движение человека. Ограничения подвижности больного и неблагоприятное влияние на организм. Особенности перемещения пациента в постели. Укладывание пациента и медицинские кровати.
| Рубрика | Биология и естествознание |
| Вид | реферат |
| Язык | русский |
| Дата добавления | 03.12.2014 |
| Размер файла | 16,4 K |
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Понятие о биомеханике
Биомеханика человека - составная часть прикладных наук, изучающих движение человека.
Движения частей тела человека представляют собою перемещения в пространстве и времени, которые выполняются во многих суставах одновременно и последовательно. Движения в суставах по своей форме и характеру очень разнообразны, они зависят от действия множества приложенных сил. Все движения закономерно объединены в целостные организованные действия, которыми человек управляет при помощи мышц. Учитывая сложность движений человека, в биомеханике исследуют и механическую, и биологическую их стороны, причем обязательно в тесной взаимосвязи.
Поскольку человек выполняет всегда осмысленные действия, его интересует, как можно достичь цели, насколько хорошо и легко это получается в данных условиях. Для того чтобы результат движения был лучше, и достичь его было бы легче, человек сознательно учитывает и использует условия, в которых осуществляется движение. Кроме того, он учится более совершенно выполнять движения. Биомеханика человека учитывает эти его способности, чем существенно отличается от биомеханики животных
Биомеханика человека изучает, какой способ и какие условия выполнения действий лучше и как овладеть ими. Общая задача изучения движений состоит в оценке эффективности приложения сил для достижения поставленной цели. Всякое изучение движений, в конечном счете, направлено на то, чтобы помочь лучше выполнять их
Физическая активность может быть осмысленным актом поведения больного или осуществляется пассивно, при помощи медперсонала. Дозированная тренировка вызывает развитие приспособительных процессов у больного, находящегося как в сознательном, так и в бессознательном состоянии.
Пассивной называется физическая активность, выполняемая с помощью мед. работника (инструктора) без волевого усилия больного, при этом активное сокращение мышц отсутствует. Пассивная активность улучшает крово- и лимфообразование, предупреждает тугоподвижность в суставах, а также применяется для воссоздания правильной схемы двигательного акта (при параличах или парезах конечностей). Пассивные движения стимулируют появление активных движений благодаря рефлекторному влиянию эффективной импульсации, возникающей в кожных покровах, мышцах и суставах при пассивных движениях. Кроме того, пассивная активность менее нагрузочна для организма и поэтому может выполняться на самых ранних стадиях травматического повреждения или заболевания опорно-двигательного аппарата
Ограничения подвижности больного оказывает на его организм неблагоприятное влияние (т.н. гиподинамия). Она может быть обусловлена характером заболевания или особенностями произведенной операции (многочисленные переломы, обширные операции на органах грудной клетки).
Перемещение пациента в постели
Перемещение пациента в постели осуществляется поэтапно.
1. Медицинская сестра оценивает способность пациента к участию в процедуре, а именно: его подвижность, мышечную силу, адекватную реакцию на слова.
2. Она поднимает постель на максимально удобную для работы с пациентом высоту.
3. Медицинская сестра убирает с постели подушки и прочие предметы, мешающие перемещению пациента.
4. При необходимости ей помогают санитарка, другая медицинская сестра, врач.
5. Медицинская сестра объясняет пациенту смысл процедуры, чтобы успокоить его и добиться сотрудничества.
6. Она придает постели горизонтальное положение, фиксирует ее.
7. Для снижения риска инфицирования медицинская сестра проводит процедуру в перчатках. После перемещения пациента она опускает кровать, поднимает поручни для обеспечения безопасности пациента.
Медицинская сестра проверяет правильность положения тела пациента. Его спина должна быть выпрямлена; исключаются любые искривления, напряжение. Медицинской сестре следует выяснить, удобно ли пациенту положение, в котором он находится.
Беспомощного пациента перемещают в постели в следующем порядке:
1) поворачивают пациента на спину, проверяют правильность положения тела;
2) опускают изголовье постели в горизонтальное положение;
3) в изголовье кладут подушку, чтобы пациент не ударился головой о спинку кровати;
4) встают лицом к изножью постели под углом 45° и передвигают ноги пациента по диагонали к изголовью кровати; процедура начинается с перемещения ног, так как они легче других частей
тела и их удобнее передвигать;
5) перемещаются вдоль бедер пациента;
6) сгибают ноги в коленях, чтобы руки находились на уровне туловища пациента:
7) передвигают бедра пациента по диагонали к изголовью;
8) перемешаются вдоль туловища пациента параллельно верхней части его тела;
9) подсовывают руку, находящуюся ближе к изголовью, под плечо пациента, снизу обхватив его плечо; плечо нужно одновременно поддерживать кистью руки;
10) другую руку подсовывают под верхнюю часть спины; поддержка головы и шеи обеспечивает надлежащее выпрямление тела пациента и предупреждает травматизм, а поддержка туловища уменьшает трение;
11) передвигают туловище, плечи, голову и шею пациента по диагонали по направлению к изголовью;
12) поднимают боковой поручень кровати для предотвращения падения пациента с постели и переходят на ее другую сторону;
13) переходя с одной стороны постели на другую, повторяют процедуру до тех пор, пока тело пациента не достигнет желаемой высоты;
14) перемещают пациента на середину постели, точно так же поочередно манипулируя отделами его тела, до достижения поставленной цели;
15) поднимают боковые поручни для обеспечения безопасности пациента;
16) снимают перчатки, моют руки.
Медицинская сестра поворачивает пациента в кровати, перекатывая или плавно перемещая его по направлению к себе, а не от себя. Нельзя тянуться вперед, чтобы поднять пациента, котоpый находится на некотором расстоянии. В большинстве случаев пациента перекатывают на спину, а затем передвигают на край кровати, чтобы вернувшись в первоначальное положение, он снова оказался посередине нее. Для того чтобы подвинуть человека на край кровати, сначала подвигают его голову и плечи, затем ноги, а потом туловище. Для осуществления каждого из этих движений под пациента кладут руку с той стороны кровати, к которой его подвигают. Следует стоять в устойчивом положении и перекатывать пациента к краю кровати. Если пациент тучный, медицинской сестре могут понадобиться два помощника для перемещения туловища и бедер больного. Для этого встают рядом и переворачивают пациента при помощи натянутой простыни в одиночку или вдвоем.
Положение больного в постели
Положение больного, как правило, указывает на тяжесть заболевания. (Следует знать, что иногда больные с тяжелым заболеванием довольно длительное время продолжают работать и ведут активный образ жизни, в то время как мнительные больные с легким заболеванием предпочитают укладываться в постель.) Положение больного может быть активным, пассивным, вынужденным.
Активное положение -- это положение, которое больной может произвольно изменить, хотя и испытывает при этом болезненные или неприятные ощущения. Активное положение свойственно больным с легким течением заболевания.
В пассивном положении больной находится при определенных тяжелых заболеваниях. Иногда оно может быть очень неудобным для него (свешена голова, подвернуты ноги), но из-за сильной слабости или утраты сознания, либо вследствие большой потери крови изменить его не может.
Вынужденное положение -- это поза, которая облегчает боль и улучшает состояние больного. К такой позе его вынуждает та или иная особенность заболевания. К примеру, в случае приступа удушья больной бронхиальной астмой сидит в постели, наклонившись вперед, упирается в кровать, стол, включая тем самым вспомогательные мышцы в акт вдоха (рис. 1, а). Во время приступа кардиальной астмы больной сидит, несколько откинувшись назад, и опирается руками о постель, ноги у него опущены. В такой позе уменьшается масса циркулирующей крови (часть ее задерживается в нижних конечностях), несколько опускается диафрагма, снижается давление в грудной клетке, увеличивается экскурсия легких, улучшается газообмен и отток венозной крови от головного мозга.
Положение Фаулера можно назвать положением полулежа и полусидя. Пациента укладывают в положение Фаулера в следующей последовательности:
1) приводят кровать пациента в горизонтальное положение;
2) поднимают изголовье кровати под углом 45 -- 60о (в таком положении пациент чувствует себя комфортнее, ему легче дышать и общаться с окружающими);
3) кладут голову пациента на матрац или низкую подушку, чтобы предупредить сгибательную контрактуру шейных мышц;
4) если пациент не в состоянии самостоятельно двигать руками, под них подкладывают подушки для предупреждения вывиха плеча вследствие растяжения капсулы плечевого сустава под воздействием направленной вниз силы тяжести руки и предупреждения сгибательной контрактуры мышц верхней конечности; биомеханика больной пациент медицинский
5) под поясницу пациенту кладут подушку с целью уменьшения нагрузки на поясничный отдел позвоночника;
6) под бедро пациента подкладывают небольшую подушку или валик (для предупреждения персразгибания в коленном суставе и сдавливания подколенной артерии под действием силы тяжести);
7) под нижнюю треть голени пациента подкладывают небольшую подушку с целью предупреждения длительного давления матраса на пятки;
Укладывание пациента в положение Симса является промежуточным между положениями лежа на животе и лежа на боку. Манипуляция осуществляется в следующей последовательности:
1) опускают изголовье кровати в горизонтальное положение;
2) кладут пациента на спину;
3) переводят пациента в положение лежа на боку и частично лежа на животе (на постели находится лишь часть живота пациента);
4) кладут подушку под голову пациента для предотвращения чрезмерного сгибания шеи;
5) медицинская сестра подкладывает подушку под верхнюю руку, согнутую в локтевом и плечевом суставе под углом 90о; нижнюю руку кладут на постель, не сгибая, для сохранения правильной биомеханики тела;
6) кладут полушку под согнутую верхнюю ногу так, чтобы нижняя голень оказалась на уровне нижней трети бедра, для предотвращения поворота бедра внутрь, предупреждения переразгибания конечностей, профилактики пролежней в области коленных суставов и лодыжек;
Положение пациента в постели нужно менять каждые 2 часа. Уложив пациента в любое из перечисленных положений, следует убедиться, что он чувствует себя комфортно.
Кровати медицинские функциональные предназначены для обеспечения необходимых условий ухода за больными с тяжелыми заболеваниями нервно-мышечной и сердечно-сосудистой систем. С их помощью пациенту можно придать наиболее оптимальное положение в зависимости от его заболевания. Кровати используют как при стационарном обслуживании, так и для транспортирования больных внутри ЛПУ. Преимуществом кроватей является применение гидропневмоамортизаторов (газовых пружин), что позволяет легко и плавно регулировать угол подъема секций ложа кровати.
Подобные документы
Понятие осанки как способа построения биомеханической схемы тела человека в вертикальном положении. Деформация позвоночника, грудной клетки, таза и нижних конечностей - последствия неправильного положения тела. Определение основных задач осанки.
реферат [103,3 K], добавлен 30.11.2010
Анатомия и физиология как науки. Роль внутренней среды, нервной и кровеносной систем в превращении потребностей клеток в потребности целого организма. Функциональные системы организма, их регуляция и саморегуляция. Части тела человека, полости тела.
презентация [10,6 M], добавлен 25.09.2015
Понятие о биосфере. Структура и границы биосферы. Общая масса живых организмов. Распределение биомассы по планете. Круговорот веществ в природе как главная функция биосферы. Влияние человека на биосферу. Влияние загрязнения среды на здоровье человека.
презентация [1,8 M], добавлен 07.04.2012
Изучение ритмов активности и пассивности, протекающих организме человека. Физический, эмоциональный и интеллектуальный ритмы организма. Значение критических дней для каждого биоритма человека. Солнечно-лунно-земные и космические влияния на организм.
презентация [321,0 K], добавлен 17.04.2011
Дыхание как совокупность физиологических процессов, обеспечивающих поступление в организм кислорода и выделение во внешнюю среду углекислого газа. Работа дыхательной системы человека, особенности ее строения. Обмен O2 и CO2 между организмом и средой.
Строение и функции органов опоры и движения отличаются у человека большой сложностью. Этим обусловлено чрезвычайное многообразие возможностей положений и движений тела. Особенности тела человека, в частности двигательного аппарата, дают основание рассматривать тело в целом и его части как особые биомеханические системы.
Под биомеханическими системами понимается объединение живых объектов(например, органов, тканей), обладающих общими особенностями в проявлении законов механического движения, а также общими особенностями способов управления ими, участия в этих движениях или в их использовании. Различают системы активные(всего тела, двигательного аппарата) и пассивные (внутренних органов, мягких и жидких тканей). Особый интерес для изучения движений человека представляет биомеханическая система его двигательного аппарата, которая служит: а) источником энергии, б) механизмом для передачи усилий, в) объектом движения и г) системой управления.
МЕХАНИЧЕСКИЕ СВОЙСТВА ЗВЕНЬЕВ И ИХ СОЕДИНЕНИЙ
С позиций теории механизмов и машин1 части тела человека, имеющие подвижные соединения, принято рассматривать как звенья, составляющие биокинематические пары и цепи. Звенья цепей и их соединения находятся под действием приложенных к ним сил (нагрузок). В этих условиях проявляются особенности строения и функции (механические свойства) тела человека, влияющие на выполнение движений.
Виды нагрузок и характер их действия
Силы, приложенные к телу и в совокупности вызывающиеегодеформации2, называются нагрузками. (Деформация — изменение формы и размеров.)
К основным видам деформаций относятся: растяжение, сжатие, изгиб, кручение и сдвиг(рис. 2). Кости скелета и мягкие ткани при деформации под действием приложенных сил (нагрузок) противодействуют им.
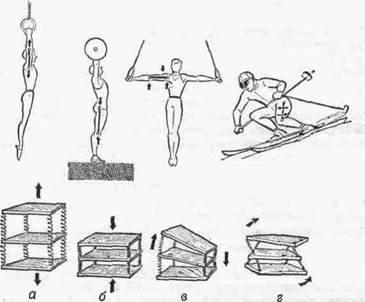
Рис. 2. Нагрузки, вызывающие деформацию:
А — растяжение; б — сжатие; в — изгиб; г — кручение (ориг.). На схемах внизу — смещение элементов (по С. Э. Хайкипу)
Нагрузки, обусловливающие растяжение,—это самые характерные нагрузки для мягких тканей. Они возникают, например, при висах (см. рис. 2, а) или во время удержания груза в опущенных руках.
Нагрузки, создающие сжатие костей и хрящей, встречаются чаще всего при вертикальном положении тела на опоре. В этом случае на скелет действуют, с одной стороны, силы тяжести тела и вес внешних отягощений, а с другой —давление опоры (см. рис. 2, б).
Нагрузки, вызывающие изгиб, обычно встречаются, когда кости выполняют роль рычагов. В этих случаях приложенные к ним силы мышц и силы сопротивления направлены поперек костей и вызывают изгиб (см. рис. 2, в).
Наконец, нагрузки, обусловливающие кручение, чаще всего встречаются при вращательных движениях звена вокруг продольной оси (см. рис. 2, г).
По характеру действия различают нагрузки статические и динамические. Первые обычно постоянны по величине и, как правило, относительно невелики. Вторые возникают при движениях1, когда приложены силы инерции; они изменяются и могут нарастать до очень больших величин (например, нагрузки на сжатие после падения с большой высоты, нагрузки на изгиб при ударе). Такие динамические нагрузки, особенно действующие не в обычном направлении (например, при ударе поперек кости), могут превысить запас прочности того или иного звена, тогда произойдет повреждение двигательного аппарата.
Мышцы, суставные сумки, связки, а также хрящи, соединяющие кости скелета, деформируясь, уменьшают действие динамических нагрузок. Особенно большую роль в смягчении этого действия играют благодаря своей упругости мышцы. Если они недостаточно амортизируют нагрузку, то повреждаются связки и хрящи, а иногда даже и кости и сами мышцы.
Кости, как твердые тела, при передаче силвыполняют роль рычагов.
В биомеханике рассматривают в качестве твердых рычагов многие части тела (плечо, бедро и т. д.); считается, что они не изменяют своей длины, не сгибаются и не скручиваются.
Упругие деформации
Упругие деформации возникают в теле под действием нагрузки и исчезают при ее снятии.
Изменение формы (деформация) тел под действием приложенных к ним сил — свойство всех реальных тел2. Абсолютно твердых тел, которые не деформируются ни прикаких условиях, в природене существует.
В случае упругой деформации форма тела после прекращения действия деформирующей силы восстанавливается (например, стальная пружина) в отличие от пластической деформации, которая остается после снятия нагрузки, т. е. прежняя форма уже не восстанавливается (например, сырая глина). Таким образом, упругость — свойство тела самостоятельновосстанавливатьпосле деформации свою форму.
Упругая сила (сила упругого напряжения), противодействуя изменению формы, нарастает и, в конце концов, прекращает деформацию как останавливающая сила — в этот момент она становится равной деформирующей нагрузке. Эта же упругая сила при снятии деформирующей нагрузки восстанавливает прежнюю форму тела как восстанавливающая сила. Напряжение деформированного тела измеряется в килограммах на квадратный сантиметр его сечения3.
Рассмотрим зависимость между деформацией тела и напряжением (на примере мягкой стали). Можно выделить 4 основных варианта:
зона линейной упругости — напряжение прямо пропорционально деформации (идеальная пружина). После разгрузки деформация полностью исчезает;
зона нелинейной упругости — на равные приращения деформации приходятся все меньшие (как у мягкой стали) или все большие (как у мышцы) приращения напряжения; после разгрузки форма тела полностью восстанавливается;
зона пластической деформации — с увеличением деформации напряжение нарастает; после разгрузки форма тела восстанавливается не полностью (остаточная деформация);
зона разрушения — тело начинает разрушаться.
Зоны деформации различны у разных тел. Несколько упрощая, можно сказать, что у каждого тела в определенных условиях одна из зон больше других. Поэтому принято называть тело в зависимости от преобладающей зоны деформации линейно упругим, нелинейно упругим, пластическим или хрупким1. Как было сказано выше, после упругой деформации происходит полное восстановление формы (линия ЛО); после пластической может произойти некоторое ее восстановление (линия БВ), но будет еще остаточная деформация (05).
Мышцы как упругие тела обладают нелинейной упругостью и непременной жесткостью.
СОЕДИНЕНИЯ ЗВЕНЬЕВ
Соединения звеньев в биокинематических цепях обусловливают многообразие возможностей движении. От способа соединения и участия мышц в движениях зависит их направление и размах (пространственная. форма движений).
2.1. Кинематические пары
Кинематическая пара — это подвижное соединение двух звеньев. Способ соединения накладывает ограничения (связи) на относительное движение (степени связи); наличие подвижности в соединении предоставляет звеньям определенные возможности относительного движения (степени свободы движения).
Различают связи: а) геометрические (постоянные препятствия перемещению в каком-либо направлении) и б) кинематические (ограничениескорости, например, мышцей-антагонистом) .
Кинематические пары бывают: а) поступательные— одно звено может перемещаться поступательно по другому (например, боковые движения нижней челюсти); б) вращательные(па-пример, повороты в наиболее распространенных в теле человека цилиндрических и шаровидных суставах); в) винтовые с сочетанием поступательного и вращательного движений (например, в голеностопном суставе).Соединения, допускающие поворот звеньев пары, называют шарнирами.
Кинематические цепи
Кинематическая цепь — это последовательное или разветвленное соединение ряда кинематических пар.Кинематическую цепь, в которой конечное звено свободно, называют незамкнутой, а цепь, в которой нет свободного конечного звена,— замкнутой.
В каждом соединении незамкнутой цепи возможны изолированные движения. Они геометрически независимы от движений в других соединениях (если не учитывать взаимодействия мыши). Например, свободные конечности, когда их концевые звенья свободны (рис. 4, а), представляют незамкнутые цепи. Замкнутымикинематическими цепями в теле человека являются, например, грудина, ребро, позвоночник, ребро и снова грудина.
В замкнутой или замкнувшейся цепи невозможно одиночное изолированное движение, т. е. движение в одном соединении. Так, сгибая и выпрямляя ноги в выпаде, можно убедиться в том, что движение в любом суставе непременно вызывает движения и в других (см. рис. 4, б).
Таким образом, движения в незамкнутых цепях характеризуются относительной независимостью звеньев. В замкнутых же, а также замкнувшихся цепях движения одних звеньев влияют на движения даже отдаленных звеньев (помогают или мешают).
Например, сгибая руки в локтевых суставах в упоре лежа (замкнувшаяся цепь), можно или отводить плечи, или разгибать их в плечевых суставах. Тогда будут растягиваться либо приводящие мышцы плеча (большие грудные, широчайшие спины и др.), либо сгибатели (передние части дельтовидных). Теперь при разгибании рук в локтевых суставах приводящие мышцы или сгибатели плечевых суставов в зависимости от того, какие мышцы растянуты, могут передавать свое действие на локтевые суставы — способствовать разгибанию рук в этих суставах.
Передача действия мышц на смежные и отдаленные суставы характерна для замкнутых цепей и часто имеет место в подобных условиях работы мышц.
В замкнутых цепях возможностей движений меньше, но управление ими точнее, чем в незамкнутых.
Степени свободы движений
Число степеней свободы движений соответствует количеству возможных независимых линейных и угловых перемещений тела.
Тело, ничем не ограниченное в движениях (может двигаться в любом направлении), называется свободным. Движение свободного тела возможно в трех основных направлениях — вдоль осей координат, а также вокруг этих трех осей; оно имеет 6 степеней свободы движения (рис. 5, а).
Наложение связей уменьшает количество степеней свободы (табл. 1). Если закрепить одну точку тела, то сразу снимается 3 степени свободы: тело не сможет двигаться вдоль трех осей координат; у него останутся только возможности вращения вокруг этих осей, т. е. только три степени свободы (см. рис. 5, б). Так соединены кости трехосных (шаровидных) с у с т а в о в.
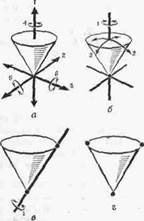
При закреплении двух точек в теле возможно вращение лишь вокруг линии (оси), проходящей через обе точки (см. рис. 5, в). Так соединены кости одноосных суставов, обеспечивающих одну степень свободы. Если же закреплены три точки (не лежащие на одной линии), то движения тела совсем невозможны (см. рис. 5, г). Та кое соединение неподвижно и, следовательно, не является суставом.
Как известно, двуосные суставы (эллипсовидный — лучезапястный, седловидный — первый запястно-пястный) обеспечивают вторую степень свободы благодаря неполному взаимному соответствию своих суставных поверхностей (неконгруэнтность). По этой же причине, если рука в локтевом суставе согнута, возможны приведение и отведение локтевой кости в плечелоктевом сочленении (например, при поворотах отвертки, штопора, ключа вокруг оси, проходящей вдоль второй пястной кости. в преобладающей части суставов тела человека 2 или 3 степени свободы. При нескольких степенях свободы движений (двух и более) возможно бесчисленное множество траекторий. Значит, в движениях в неодноосных суставах отсутствует определенность, задаваемаяспособом соединения. Тем более это характерно для цепей с несколькими неодноосными суставами.
Множество возможностей движений в суставах кинематической пары более чем с одной степенью свободы в отличие от технической пары требует для выполнения каждого определенного движения: а) выбор необходимой траектории, б) управления движением по траектории (направлением и величиной скорости) и в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории (см. гл. IV).
Геометрия движений
Число основных осей сустава соответствует количеству степеней свободы движений одного звена относительно другого. Плоскость движения перпендикулярна оси вращения и характеризует направление перемещения звена. Размах движений — это угловое перемещение звена из одного крайнего положения в другое.
В суставном движении различают ось, плоскость и размах. Все пары звеньев связаны в суставах неразрывно, как в шарнирах, поэтому они могут двигаться в основном только вокруг осей (не считая незначительного скольжения). Однако не существует суставов совершенно правильной геометрической формы. А если бы даже такие и были, то при сдавливании гиалиновых суставных хрящей форма суставных поверхностей нарушалась бы. Следовательно, геометрические оси вращения не постоянны и правильнее говорить о мгновенных осях вращения. В связи с этим количество осей в суставе означает в биомеханическом смысле только количество степеней свободы движения, а не постоянных геометрических осей вращения.
Продольные оси звеньев чаще всего не строго перпендикулярны геометрическим осям вращения. Поэтому различные точки звеньев движутся в плоскостях, параллельных друг другу, а сама продольная ось звена описывает поверхности, близкие к коническим. Таким образом, плоскость движения в суставе характеризует, в какой плоскости движутся точки звена. Она перпендикулярна геометрической оси вращения и не обязательно совпадает с плоскостью движения продольной оси самого звена.
Размахом движений измеряется подвижностьв каждом отдельном суставе1. Наибольший размах бывает в пассивных движениях; с увеличением внешней нагрузки (вес отягощения, силы инерции) растягиваются мягкие ткани-ограничители. Размах же в активном движении меньше, чем в пассивном, так как там мышцы имеют предел силы, в то время как величина внешних сил не ограничена. К тому же сила собственных мышц пары звеньев приложена невыгодно при крайних положениях звеньев в суставе.
Подвижностью соседних звеньев в соединениях каждой пары обусловлена гибкость всей кинематической цепи в целом. Гибкость цепи (например, позвоночника) измеряется общим размахом движения концевого звена относительно другого конца цепи.
Общий размах движения в целомбываетменьше суммы размахов изолированных движений в суставах, так как вследствие пассивной недостаточности многосуставных мышц возникают дополнительные связи.
ЗВЕНЬЯ КАК РЫЧАГИ
Скелет, составленный из подвижно соединенных костей, представляет собой твердую основу биокинематических цепей. Звенья цепей с приложенными к ним силами (мышечной тяги и др.) в биомеханике рассматриваются как система составных рычагов.
3.1. Виды рычагов в теле человека
Рычаг — твердое тело, которое может под действием приложенных сил вращаться вокруг опоры (оси) в двух противоположных направлениях, а также сохранять свое положение.
Как простейший механизм, рычаг служит для передачи движения и силы на расстояние.
Каждый рычаг имеет точку опоры — ось рычага (О на рис. 6), точки (А, В) приложения двух взаимно противодействующих сил (G и Q). Чтобы определить расстояние до места приложения сил от оси рычага, измеряют плечи рычага (О А и 0В). Чтобы определить расстояния до направления действия сил от оси рычага, измеряют плечи сил и k — перпендикуляры, опущенные из точки О на линии действия сил, т. е. их направления).
Рычаги бывают о д н о п л еч и е (с точкой опоры на конце рычага — см. рис. 6,а)и двуплечие(с точкой опоры между концами рычага — см. рис. 6, б). Принципиальной разницы в отношении работы сил между ними нет: поворачивая плечо двуплечего рычага вокруг точки О из положения do в di, затем da, можно перейти к рычагу одноплечему (см. рис.6, б). У нового, одноплечего, рычага иная форма, но те же свойства, что и у прежнего, двуплечего, рычага.
Звенья тела человека имеют в своей основе костные рычаги. Двуплечие рычаги используются, например, при сохранении положения стоя, а одноплечие — в быстрых движениях конечностей. Одно и то же звено для разных мышц может быть то одноплечим, то двуплечим рычагом.
Читайте также: