
Автоматические мосты и компенсаторы доклад
Обновлено: 02.07.2024
Общие сведения.Мосты широко применяют для измерения сопротивления, индуктивности, емкости, добротности и угла потерь. Кроме того, на основе мостовых схем выпускают приборы для измерения и неэлектрических величин (температуры, перемещений и др.), а также различные устройства автоматики. Мосты получили широкое распространение т.к. обладают универсальностью, высокой точностью и чувствительностью. Рассмотрим классификацию мостов.
По характеру сопротивлений плеч и рода тока моста:
− мосты постоянного тока;
− мосты переменного тока.
По виду схемы (числа плеч):
− одинарные (четырехплечие) мосты;
− двойные (шестиплечие) мосты.
В зависимости от способа уравновешивания:
− c ручным уравновешиванием;
− c автоматическим уравновешиванием.
Компенсаторы в основном применяются для измерения напряжений и ЭДС постоянного, переменного тока. Они обладают высокой чувствительностью и позволяют получать результаты с высокой точностью. Также как и мосты, компенсаторы бывают с ручным и автоматическим уравновешиванием. Более подробно ознакомиться самостоятельно.
Основные теоретические положения мостовых схем.Рассмотрим схему одинарного моста переменного тока, приведенную на рис. 1.
Рис.1. Схема одинарного моста переменного тока
Плечи моста а−б, б−в, а−г, г−в содержат в общем случае комплексные сопротивления . В выходную диагональ б−г включается нагрузка (в частном случае − нуль-индикатор) с сопротивлением . Равновесию моста соответствуют определенное соотношение параметров плеч, при котором . Оно имеет вид
где . Если измеряемую величину определяют по этому условию, то мост называется уравновешенным. В ряде случаев измеряемую величину можно определять по значению тока или напряжения выходной диагонали моста. Такой мост называют неуравновешенным (более подробно ознакомиться самостоятельно).
В развернутом виде можно записать равенства для мнимых и вещественных членов
Наличие двух уравнений равновесия свидетельствует о том, что для достижения равновесия моста переменного тока требуется регулировка не менее двух его параметров. Под сходимостью моста понимают возможность достижения состояния равновесия определенным числом поочередных переходов от регулировки одного параметра к регулировке другого. Условия равновесия моста могут быть выражены и другим способом с учетом следующих выражений
где − углы фазового сдвига тока относительно напряжения в соответствующих плечах. В результате имеем
Из этого выражения можно перейти к следующим формулам
Условие описывает возможность уравновешивания моста в зависимости от расположения его плеч и характера их сопротивлений. Например, если третье и четвертое плечи имеют чисто активные сопротивления R3, R4 и , то сопротивления двух других смежных плеч могут иметь индуктивный или емкостной характер. В мостах переменного тока часто применяют электронные нуль-индикаторы, входное сопротивление которых можно приближенно считать равным бесконечности. С учетом этого напряжение между точками б и г можно представить в следующем виде
Схема моста постоянного тока структурно ничем не отличается от схема моста переменного тока. Отличие заключается в том, что в плечи моста включаются сопротивления R1, R2, R3, R4, а в диагональ моста нуль-индикатор постоянно тока (магнитоэлектрический гальванометр с сопротивлением RГ). В этом случае условие равновесия при котором ток в диагонали моста б−г равен нулю будет иметь вид
Из этого выражения видно, что объект измерения можно включить в любое плечо моста, а и определить его сопротивление через сопротивления других плеч. Сущность измерения сопротивления с помощью моста заключается в следующем. Неизвестное сопротивление RX включают в одно из плеч моста, например в первое плечо, затем добиваются равновесия моста (отсутствия тока в цепи гальванометра) за счет изменения одного или нескольких сопротивлений плеч. Неизвестное сопротивление RX описывается зависимостью
R2 и R4 принято называть плечами отношения, а R3 – плечом сравнения.
Чувствительность является главной характеристикой моста. Выходной величиной моста может быть ток, напряжение или мощность, а входной измеряемая величина, т.е. сопротивление, индуктивность, емкость и т.д. На основании этого выделяют чувствительность мостовой схемы по току, напряжению или мощности. Приближенно чувствительность моста определяют как отношение конечных приращений выходной величины и измеряемой величины вблизи равновесия
В мостах переменного тока, как правило, применяются нуль-индикаторы чувствительные к напряжению и имеющие практически бесконечное сопротивление. Поэтому их чувствительность определяют по напряжению
где ; − напряжение выходной диагонали с учетом пренебрежения приращением в знаменателе.
Для моста постоянного тока выражения для чувствительности по току, напряжению и мощности имеют вид
где − соответственно приращение тока, напряжения или мощности в диагонали моста при изменении сопротивления первого плеча на величину .
В случае применения в качестве нуль-индикатора магнитоэлектрического нуль-гальванометра говорят о комплектной чувствительности моста
где − отклонения указателя гальванометра.
На практике используют чувствительность моста к относительному изменению сопротивления
Мосты постоянного тока.Одинарные мосты постоянного тока нашли применение для измерения средних сопротивлений в пределе 10-10 6 Ом. После уравновешивания моста величину неизвестного сопротивления определяют по выражению (8). В широкодиапазонных одинарных мостах плечо сравнения R3 выполняют в виде многодекадного магазина сопротивлений, а плечи отношений R2 и R4 в виде штепсельных магазинов сопротивления, имеющих величину 10, 100, 1000 и 10000 Ом. Нижний предел измерения таких мостов ограничивается влиянием на результат измерения сопротивлений соединительных проводов и контактов, а верхний воздействием сопротивления изоляции.
С целью снижения воздействия сопротивления соединительных проводов и контактов применяют схему одинарного моста с четырьмя зажимами подключения неизвестного сопротивления, представленную на рис.2. При измерении сопротивлений величиной более 10 Ом точку А резистора RX соединяют с зажимом 2, точку Б с зажимом 3, а зажимы 1 и 2, 3 и 4 перемыкают между собой, т.е. осуществляется обычное двухзажимное включение RX. Если же требуется измерить сопротивление менее 10 Ом, то следует убрать перемычки между зажимами 1 и 2, 3 и 4, точку резистора RX соединить с зажимами 1 и 2, а точку Б с зажимами 3 и 4, т.е. осуществляют четырехзажимное включение RX.
Рис.2. Схема одинарного моста постоянного тока
В этом случае влияние сопротивлений соединительных проводов и контактов r1, r2, r3, r4 практически исключается при . Объясняется это следующим образом. Провода и контакты, имеющие сопротивления r1 и r3, включены в диагонали моста и их сопротивления не влияют на условие равновесия моста. Влияние сопротивлений r2, r4 исключается по условию.
При использовании одинарного моста для измерения весьма малых сопротивлений могут возникать значительные погрешности из-за низкой чувствительности моста и невозможности ее увеличения в результате ограничений, накладываемых допустимой мощностью рассеивания в плечах моста. Двойные мосты не имеют этого недостатка.
Двойные мосты постоянного тока получили применение для измерения малых сопротивлений, т.к. воздействие соединительных проводов и контактов в них минимально. Схема двойного моста приведена на рис.3. Провода и контакты, предназначенные для соединения неизвестного сопротивления RX и моста, имеют сопротивления r1, r2, r3, r4.
Рис.3. Схема двойного моста постоянного тока
Условие равновесия моста, при котором ток через нуль-индикатор равен нулю, описывается выражением
Как правило, при конструировании моста и его эксплуатации выполняют следующие условия:
1) резисторы R1, R2, R3, R4 изготавливают так, что при их регулировке для уравновешивания моста всегда R1=R3 и R2=R4, т.е. (с некоторой неточностью, обусловленной, например, неточностью изготовления резисторов R1, R2, R3, R4);
3) при подключении RXчетвертый соединительный провод выполняют в виде короткого и толстого проводника, т. е. стараются сделать сопротивление r4как можно меньшим.
При соблюдении этих условий пользуются упрощенным уравнением равновесия моста, которое имеет следующий вид
Для таких мостов выбирают гальванометры с малым внешним критическим сопротивлением и большой чувствительностью по напряжению. Для измерения сопротивлений в широком диапазоне промышленность выпускает одинарные и одинарно-двойные мосты.
Мосты переменного тока. В соответствии с условиями равновесия моста переменного тока выражения (2), (3), (5) схемы мостов для измерения емкости, угла потерь индуктивности и добротности могут иметь различные варианты включения в плечи резисторов, катушек индуктивностей, конденсаторов и исследуемого объекта. Различные варианты представлены в таблице.
Автоматическими называют мосты и компенсаторы (потенциометры), у которых процесс уравновешивания автоматизирован. Они применяются в тех случаях, когда необходимо непрерывно индицировать (или регистрировать) измеряемую величину. Автоматические мосты и компенсаторы с дополнительным регулирующим устройством применяются для автоматического регулирования контролируемого технологического параметра. Примером использования автоматических мостов и компенсаторов может служить непрерывное измерение и регулирование температуры с помощью терморезистивных датчиков (мосты) или термопар (потенциометры). На рис. 6.26 приведена схема автоматического моста для измерения температуры или любого другого параметра, влияющего на величину сопротивления резистивного датчика rx. Два плеча мостовой схемы образованы постоянными резисторами r3, r4, а два других плеча - датчиком rx , резистором r2 и реохордом r1. Ползун реохорда через механическую передачу связан с валом реверсивного двигателя РД. Когда мост уравновешен, напряжение в выходной диагонали моста равно нулю и сигнал на входе электронного усилителя ЭУ отсутствует; при этом ротор двигателя неподвижен. Если
экспериментально высокоточными приборами. По этой причине на практике значение погрешностей измерения можно оценить только экспериментально. Погрешности считаются положительными, если результат измерения превышает действительное значение.
Абсолютная погрешность измерения ΔА - это разность между результатом измерения (показание прибора) Ах и истинное значение измеряемой величины А:
ΔА=Ах – А
Абсолютная погрешность имеет размерность величины А.
Относительная погрешность δ - это отношение абсолютной погрешности к истинному значению величины, выраженное в процентах:
ΔА
δ ═ ——— 100
А
Приведенная погрешность δпр - это отношение абсолютной погрешности к нормирующему значению D, выраженное в процентах:
ΔА
δпр ═ ——— 100
D
Приведённая погрешность определяет класс точности прибора. В качестве нормирующего значения берётся крайнее значение шкалы прибора (если прибор имеет одностороннюю шкалу) или сумму крайних значений шкалы (если прибор имеет двустороннюю шкалу).
Абсолютная погрешность, взятая с обратным знаком, называется поправкой.
По причине появления погрешности могут быть объективными и субъективными. Объективные погрешности возникают независимо от человека оператора. Субъективные обусловлены состоянием оператора, его органов чувств. При использовании цифровых приборов субъективная ошибка исключается. В свою очередь объективные ошибки разделяются на:
1) погрешности опознания объекта измерения, когда реальный объект не соответствует реальной модели, например, несинусоидальность тока при измерении переменного тока;
2) методические погрешности, возникающие из-за несовершенства метода, например, влияние измерительного прибора на параметры измеряемой цепи;
3) инструментальные, обусловленные техническим несовершенством средств измерений.
В зависимости от изменения во времени измеряемой величины различают статическую и динамическую погрешности. Статическая погрешность возникает при измерении постоянной во времени величины. Динамическая погрешность – это разность между погрешностью в динамическом режиме и статической погрешностью, соответствующей значению измеряемой величины в данный момент времени, т.е. это
элементов, а компенсация производится магазином сопротивлений Z2. В качестве сравнивающего устройства применяют гальванометрические нуль-органы. Классы точности компенсаторов постоянного напряжения от 0,0005 и хуже. Максимальное значение напряжения, которое может быть измерено компенсатором непосредственно, 2,12111 В. При измерении больших напряжений применяют входной делитель напряжения, но при этом теряется важное достоинство метода - отсутствие тока, отбираемого от измеряемой цепи, при равновесии схемы.
Мосты с автоматизированным процессом уравновешивания называют автоматическими мостами; они находят широкое применение для измерения и регистрации величин. Автоматические мосты с дополнительным регулирующим устройством применяют для автоматического управления производственными процессами. В настоящее время широко распространены автоматические мосты для измерения, регистрации и регулирования температуры различных объектов. В качестве измерительного преобразователя температуры в этих мостах применяются терморезисторы.
Схема автоматического моста для измерения сопротивления приведена на рис. 7-15. Мост питается от источника Если мост уравновешен, то напряжение между точками б и г равно нулю и ротор двигателя М неподвижен. При изменении измеряемого сопротивления на диагонали моста (между точками б и г) появится напряжение, значение которого зависит от Это напряжение усиливается усилителем У и подается на реверсивный двигатель М, который передвигает подвижный контакт переменного резистора в сторону достижения равновесия моста и одновременно поворачивает указатель, а при записи измеряемой величины — перемещает перо, записывающее на диаграмме ее значение. Ротор двигателя вращается до достижения равновесия моста. Если автоматический мост предназначен для управления, то тем же двигателем приводятся в действие регулирующие устройства.
Приборостроительная промышленность выпускает различные типы автоматических мостов, различающиеся габаритами, числом измеряемых величин и другими характеристиками. Основная приведенная погрешность автоматических мостов время прохождения указателем шкалы 1 —10 с.
Рис. 7-15. Схема автоматического моста для измерения сопротивления постоянному току
Рис. 7-16. Схема автоматического компенсатора постоянного тока
Автоматизация процесса уравновешивания в мостах переменного тока значительно сложнее. Автоматические мосты переменного тока для измерения и регистрации комплексного сопротивления должны иметь два регулирующих элемента (двигателя) которые обеспечивают два условия равновесия моста — по модулю и по фазе. По точности автоматические мосты переменного тока уступают мостам постоянного тока.
Автоматические компенсаторы (потенциометры) постоянного тока.
Компенсаторы, у которых процесс компенсации производится автоматически, называют автоматическими компенсаторами.
Автоматические компенсаторы применяют для измерения электрических и неэлектрических величин, которые могут быть предварительно преобразованы в напряжение постоянного тока.
Находят применение компенсаторы с полным и неполным уравновешиванием.
Схема автоматического компенсатора с полным уравновешиванием приведена на рис. 7-16. Измеряемая уравновешивается напряжением на диагонали моста, образованного резисторами с сопротивлениями Если измеряемая и компенсирующее напряжение не равны, то на вход усилителя У подается их разность Это напряжение усиливается усилителем У и подается на реверсивный двигатель М, ротор которого связан с подвижныгл контактом переменного резистора и указателем отсчетного устройства. Ротор двигателя приходит во вращательное движение, причем направление вращения зависит от знака разности
При вращении ротор перемещает подвижный контакт переменного резистора до наступления равенства Таким образом, положение подвижного контакта резистора и указателя определяется измеряемой величиной
Компенсирующее напряжение зависит от напряжения питания поэтому для этой цели используют стабилизированный источник.
Приборостроительная промышленность выпускает автоматические компенсаторы (потенциометры), различающиеся габаритами, видом записи, погрешностью, временем прохождения указателем всей шкалы и другими характеристиками. Основная приведенная погрешность автоматических компенсаторов находится в пределах время прохождения указателем всей шкалы 1 —10 с.
Для автоматического регулирования и управления производственными процессами в некоторых компенсаторах предусматриваются контакты и регулирующие устройства, которые приводятся в действие ротором реверсивного двигателя.
На рис. 7-17 приведена схема компенсатора с неполным уравновешиванием. Как видно из схемы, компенсатор этого типа представляет собой, по существу, усилитель постоянного тока (УПТ), охваченный отрицательной обратной связью. Для этой схемы справедливы соотношения:
где — чувствительность (коэффициент преобразования) усилителя постоянного тока.
Из уравнений (7-12) следует, что
т. е. между током усилителя и измеряемым напряжением существует пропорциональная зависимость, и по значению тока можно судить об Однако коэффициент пропорциональности зависит от чувствительности усилителя постоянного тока. Нестабильность параметров усилителя приводит к появлению погрешности. Если подобрать значения с и таким образом, чтобы то выражение (7-13) примет вид с.
В этом случае коэффициент преобразования всей цепи определяется только сопротивлением с.
В качестве усилителя постоянного тока применяют гальвано-метрические усилители, которые вследствие высокой чувствительности гальванометра могут иметь высокий коэффициент преобразования.
На рис. 7-18 представлена схема компенсатора, в которой использован гальванометр с фотоэлектрическим преобразователем. На подвижной части гальванометра Г укреплено зеркальце, на которое направляется луч света от лампы накаливания . При повороте подвижной части гальванометра луч света попадает на фотоэлемент Фототок усиливается усилителем У, и ток
Рис. 7-17. Схема автоматического компенсатора с изменяющимся рабочим током
Рис. 7-18. Схема фотогальвано-метрического компенсатора (усилителя)
измеряемый прибором , создает на резисторе с компенсирующее напряжение.
Подобные компенсаторы, или, как их еще часто называют, фотогальванометрические усилители, выпускаются серийно. Потребляемая таким компенсатором мощность от источника измеряемого напряжения ничтожно мала и может составлять примерно при максимальном значении измеряемой величины.
Такие компенсаторы по своим характеристикам значительно превосходят магнитоэлектрические стационарные зеркальные гальванометры: они имеют значительно меньшее время успокоения, позволяют осуществлять запись при помощи самопишущих приборов и могут измерять очень малые постоянные токи.
Автоматические компенсаторы переменного тока.
Автоматические компенсаторы могут быть полярно-координатными и прямоугольно-координатными.
На рис. 7-19 показана схема автоматического полярно-координатного компенсатора. Как видно из схемы, измеряемое
Рис. 7-19. Схема автоматического полярно-координатного компенсатора
Рис. 7-20. Схема автоматического прямоугольно-координатного компенсатора
Рис. 7-21. Векторная диаграмма измерительной цепи прямоугольно-координатного компенсатора
напряжение уравновешивается компенсирующим напряжением
Так как для достижения равновесия компенсирующее напряжение должно быть равно по модулю и противоположно по фазе измеряемому, делитель питается от фазорегулятора ротор которого связан с ротором реверсивного двигателя переменного тока.
Фазочувствительный усилитель реагирует на разность фаз измеряемого и компенсирующего напряжений. При наличии дополнительного к 180° сдвига между векторами и UK ротор двигателя придет во вращение и будет поворачивать ротор фазорегулятора до тех пор, пока вектор UK не окажется точно в противофазе с вектором
Усилитель реагирует на абсолютное значение Ротор двигателя вращается до тех пор, пока не наступит равенства по абсолютному значению напряжений и Отсчет значения производят по шкале делителя напряжения а фазы — по углу поворота ротора фазорегулятора.
Одна из возможных схем автоматического прямоугольно-координатного компенсатора показана на рис. 7-20. Угол фазового сдвига между и равен 90°. Разность между геометрической суммой этих напряжений и измеряемым напряжением подается на усилитель напряжения Усилители мощности и двигатели переменного тока являются фазочувствительными. Введением дополнительных цепей в один из усилителей мощности (например, можно добиться такого положения, что один из двигателей будет приходить в действие от составляющей напряжения а второй — от составляющей напряжения (см. векторную диаграмму рис. 7-21).
Двигатели будут работать до тех пор, пока имеются эти составляющие, т. е. до момента уравновешивания измеряемого напряжения компенсирующим напряжением
Вследствие инерционности двигателей процесс уравновешивания завершается за 3—4 с.
Двухкоординатные автоматические самопишущие приборы (графопостроители).
Рассмотренные автоматические мосты и компенсаторы производят регистрацию измеряемой величины в функции времени. Для этого диаграммная бумага в этих приборах перемещается пропорционально времени приводным механизмом. Выпускаемые в настоящее время двухкоординатные
автоматические самопишущие приборы предназначены для регистрации одной переменной в функции другой, т. е. Измеряемые величины х и у подаются каждая в свою измерительную цепь (мост или компенсатор). Если величина х обусловливает перемещение регистрирующего устройства с помощью одного из приводов по одной оси координат, то величина у обеспечивает перемещение этого регистрирующего устройства по другой оси с помощью другого приводного механизма. Таким образом обеспечивается запись графика функции
Приборы сравнения предназначены для непосредственного сравнения измеряемой величины с величиной, значение которой известно (с мерой). Приборы сравнения могут работать в двух режимах: в равновесном режиме и в неравновесном режиме. Структурные схемы приборов сравнения приведены на рисунке.
При работе в равновесном режиме (рис. а.) измеряемая величина Х полностью компенсируется воздействием меры. Значение меры или ее части, необходимой для компенсации величины Х, в процессе измерения определяется по отсчетному устройству.
В неравновесном режиме разность показаний между мерой и измеряемой величиной измеряется в отсчетном устройстве, шкала которого градуирована в единицах измеряемой величины.
В данном курсе будут рассмотрены мосты постоянного и переменного тока и компенсаторы.
Мосты постоянного тока.
Одинарный мост.
Одинарные мосты постоянного тока предназначены для измерения сопротивлений величиной от 10 Ом и более. Схема одинарного моста приведена на рисунке:
Диагональ, обозначенная на рисунке bd- называется диагональю питания. В нее включен источник питания (батарея) G. Диагональ ас называется измерительной диагональю. В нее включен указатель равновесия (гальванометр) Р.
Выведем условия равновесия моста.
В равновесном режиме Iур=0. Это условие выполняется когда:
Из первого закона Кирхгофа, с учетом того, что и следует:
I4=I1 и I3=I2. Принимая во внимание все вышесказанное можно записать:
или . Выражение - является условием равновесия моста.
Чувствительность моста по току и по напряжению определяются как:
- чувствительность моста по току. - чувствительность моста по напряжению.
yp и Uyp- изменение силы тока и напряжения в измерительной диагонали.
R/R- отношение изменения сопротивления плеча моста к полному сопротивлению этого плеча.
В частном случае, при R1=R2=R3=R4, чувствительность моста может быть записана как:
R10 - сопротивление R1 при равновесии.
, , . Rур - сопротивление указателя равновесия.
В качестве практического примера приведены параметры моста Р-369.
Диапазон измеряемых сопротивлений: 10 -4 …1.11111*10 10 Ом.
Класс точности в диапазоне до 10 -3 Ом- 1 и при измерении сопротивлений от1 до 10 3 Ом класс точности- 0.005.
Мосты переменного тока.
Мосты переменного тока применяются для измерения, как активных, так и реактивных сопротивлений (емкостных и индуктивных).
Схема моста переменного тока приведена на рисунке.
Уравнения, поясняющие принцип действия моста, записываются по аналогии с уравнениями, приведенными для одинарного моста постоянного тока, и имеют вид:
Из первого закона Кирхгофа, с учетом того, что и следует:
I4=I1 и I3=I2. Принимая во внимание все вышесказанное можно записать:
или . Выражение - является условием равновесия моста.
При работе на переменном напряжении эти уравнения должны быть записаны в показательной форме:
Из этих уравнений следуют условия равновесия моста:
Данная система уравнений показывает, что мост переменного тока может быть уравновешен только при определенном характере нагрузки и схеме включения сопротивлений в ветвях.
Автоматические мосты.
Рассмотрим работу автоматических мостов.
Автоматический мост выполнен на базе реверсивного двигателя, охваченного отрицательной обратной связью по току в измерительной диагонали.
Упрощенная схема такого моста приведена на рисунке.
Прибор работает следующим образом. К питающей диагонали ав подключен источник питания. В измерительную диагональ введены переменный резистор R и усилитель тока УТ. К выходу усилителя подключен реверсивный двигатель РД. Вал двигателя, с одной стороны управляет перемещением движка резистора R, а с другой стороны соединен со шкалой прибора. Усилитель тока подключен таким образом, чтобы при вращении двигателя сопротивления R’ и R’’ изменяясь уменьшали ток в измерительной диагонали бг. Если ток в диагонали бг будет равен нулю, управляющий сигнал на выходе усилителя исчезнет и двигатель остановится. Это состояние будет зафиксировано на шкале, которая проградуирована в единицах измеряемой величины. Если сопротивление в одном из плеч моста изменить - мост будет разбалансирован, в измерительной диагонали появится ток и процесс компенсации повторится.
Компенсаторы.
Компенсаторами называются приборы сравнения, в основу которых положен принцип компенсации Э.Д.С.
Применяются компенсаторы для измерения напряжений и Э.Д.С. с высокой точностью.
Схема компенсатора приведена на рисунке.
На приведенной схеме приняты следующие обозначения::
Gp- источник рабочего тока.
Gn- нормальный элемент.
Gx- источник измеряемого напряжения.
R- регулируемый резистор.
Ro образцовый резистор.
Rk- компенсационный резистор.
P- магнитоэлектрический гальванометр.
Если ключ К находится в положении 1, выполняется равенство:
Если ключ находится в положении 2, выполняется равенство:
Таким образом, можно сравнить напряжение неизвестного источника Gx c напряжением нормального элемента Gn. Это можно пояснить соотношением:
По приведенной схеме работает, например, компенсатор Р 355. Он имеет класс точности 0.05…0.5 в пределах измерения напряжения 0.6…1500 мВ.
Для увеличения скорости измерений применяют автоматические компенсаторы. Одна из схем такого компенсатора показана на рисунке.
Схема работает следующим образом: В основе прибора лежит усилитель постоянного тока, охваченный обратной связью.
Если обозначить коэффициент усиления УПТ как s, можно записать:
и . Отсюда можно вывести прямую зависимость между током, протекающим по микроамперметру и измеряемым напряжением.
Такие компенсаторы применяют для измерения малых напряжений, например на выходе


ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между.

Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам.


Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем.
Тема 5.1. Упрощенная электрическая схема компенсатора постоянного тока. Четырёхплечный мост.
Рассмотренные ранее приборы электромеханической группы являются приборами непосредственной оценки измеряемого параметра и все (в большей или меньшей степени) потребляют мощность из измерительной цепи, что может приводить к нарушению работы исследуемого объекта. Измерение тока и напряжения аналоговыми электромеханическими приборами возможно в лучшем случае с погрешностью 0,l % (класс точности прибора 0,1).Более точные измерения можно выполнить методом сравнения с мерой. Средства измерений, использующие метод сравнения, называются компенсаторами или потенциометрами.
Компенсаторы— приборы, в которых измерение производится методом сравнения измеряемой величины с эталонной. Принцип действия компенсатора основан на уравновешивании (компенсации) измеряемого напряжения известным падением напряжения на образцовом резисторе. Момент полной компенсации фиксируется индикаторным прибором (нуль-индикатором), Разработаны компенсаторы переменного и постоянного тока. Компенсационный метод применяется также в цифровых измерительных приборах.

Рис. 5.1 Упрощенная принципиальная схема компенсатора постоянного тока
Источник, постоянного напряжения Е0 обеспечивает протекание рабочего тока Iр по цепи, состоящей из последовательно включенных измерительного Rи , установочного (образцового) Rу и регулировочного Rрег резисторов.
Установочный резистор Rу , представляет собой катушку сопротивлений специальной конструкции с точно известным и стабильным сопротивлением. В схеме элемент НИ — нуль-индикатор, реагирующий на очень маленькие постоянные токи. С помощью переключателя нуль-индикатор вначале включается в цепь установочного сопротивления Rу (положение переключателя 1). При этом регулировочным сопротивлением Rрег добиваются отсутствия тока в цепи НИ. Это означает, что Iр Rу= Енэ, откуда значение рабочего тока определяется через соотношение:
где Енэ – напряжение источника.
Затем нуль-индикатор включается в измерительную цепь (положение переключателя 2) и изменением измерительного сопротивления Rи -добиваются нулевого тока, а значит; равенства:
Итак, измеряемое напряжение определяется с достаточно высокой точностью и без нарушения работы измерительной цепи, так как в момент измерения ток через индикатор не протекает
При измерениях напряжений на производстве применение находят автоматические компенсаторы, в которых поддерживается разностное значение с помощью следящей системы.
Мостышироко используют для измерения сопротивления, индуктивности, емкости, добротности и угла потерь. На основе мостовых схем выпускают приборы для измерения неэлектрических величин (температуры, перемещений и др.) и различные устройства автоматики. Широкое применение мостов объясняется возможностью получения высокой точности результатов измерений, высокой чувствительности и возможностью измерения различных величин.
В зависимости от характера сопротивлений плеч, образующих мост, и рода тока, питающего мост, выделяют мосты:
В зависимости от вида схемы (числа плеч) мосты постоянного тока бывают:
Мосты выпускаются с ручным и автоматическим уравновешиванием.
Мост постоянного тока содержит четыре резистора, соединенных в кольцевой замкнутый контур. Резисторы R1, R2, R3 и R4 этого контура называются плечами моста, а точки соединения соседних плеч – вершинами моста. Цепи, соединяющие противоположные вершины, называют диагоналями. Одна из диагоналей (3-4) содержит источник питания GB, а другая (1-2) — указатель равновесия PG.
Мост называется уравновешенным, если разность потенциалов между точками 1 и 2 равна нулю, т.е. напряжение на диагонали, содержащей индикатор нуля, отсутствует и ток через индикатор равен нулю.

Рис.5.2. Схема четырехплечего (одинарного) моста постоянного тока
Для того чтобы мост был уравновешен, произведения сопротивлений противолежащих плеч должны быть равны. Если сопротивление одного из плеч неизвестно (например, R1 = Rx), то условие равновесия будет иметь вид:
Таким образом, измерение при помощи одинарного моста можно рассматривать как сравнение неизвестного сопротивления Rx с образцовым сопротивлением R2 при сохранении неизменным отношения R3/R4. По этой причине плечо R2 называют плечом сравнения, плечи R3 и R4 — плечами отношения.

Тема 5.2. Применение мостов постоянного тока для определения места повреждения электрического кабеля.
При повреждении кабельной линии определяют предварительно зону повреждения, а затем уточняют и выявляют место повреждения. Применяя в зависимости от характера повреждения: индукционный (определяется зона однофазного или многофазного замыкания, зона обрыва любого количества фазных жил); акустический (позволяет определить место однофазных и многофазных замыканий в кабеле при заплывающем пробое); петлевой (применяется для определения зоны однофазных и двухфазных замыканий на землю); емкостный (позволяет определить зону обрыва фазных жил кабеля); импульсный (определяется зона однофазного или многофазного замыкания, зона обрыва любого количества фазных жил); метод колебательного разряда (применяется при заплывающих пробоях кабелей).
Рассмотрим более подробно петлевой метод.
Метод петли применяют для определения зоны повреждения при одно- и двухфазных замыканиях при наличии одной неповрежденной жилы или параллельного кабеля с неповрежденными жилами.

Метод основан на принципе измерительного моста постоянного тока, позволяющего определить отношение сопротивлений поврежденной жилы кабеля от места измерения до точки замыкания и обратной петли.
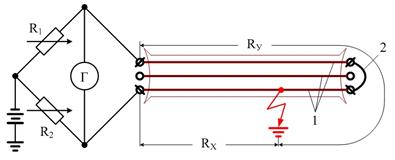
Рис. 5.3 Cхема определения места повреждения кабеля методом петли: 1 – фазы испытываемой кабельной линии; 2 – перемычка (закоротка); Lк – длина кабельной линии; L – расстояние до места повреждения; Г – гальванометр; ИП – источник питания; R1, R2 – регулируемые плечи моста; Rx – сопротивление участка кабеля L; Rу – сопротивление участка кабеля 2Lк - L
Для этого поврежденную и неповрежденную жилы кабеля соединяют на одном конце линии перемычкой в форме петли (рис.5.3). В результате образуется четырехплечевой мост, состоящий из регулируемых сопротивлений: R1 – сопротивление моста подключенное к неповрежденной жиле кабеля и R2 – сопротивление моста подключенное к поврежденной жиле кабеля, а также сопротивлений жил кабеля: Rx – пропорционального длине участка кабеля L и Rу – пропорционального длине участка кабеля 2Lк - L. Регулируя сопротивления R1 и R2 устанавливают стрелку гальванометра в нулевое положение, что соответствует равновесию плеч моста
Поскольку сопротивление жилы прямо пропорционально ее длине (расстояние до места повреждения L пропорционально сопротивлению этого участка кабеля Rx), то расстояние от места измерения до места повреждения кабельной линии можно определяется по формуле
Для проверки точности измерения следует поменять концы проводов идущие от прибора (моста) к кабелю и провести новое измерение, при этом будет найдено расстояние 2Lк - L. Если результаты обоих измерений в сумме заметно отличаются от двойной длины кабеля, то измерения произведены неточно и их надо повторить, предварительно проверив все контакты в схеме.
В качестве приборов определения зоны повреждения силовых кабелей, петлевым методом применяются мосты постоянного тока Р333, Р333-М1. Петлевой метод был самым первым методом отыскания места повреждения и в настоящее практически не применяется, так как он недостаточно точен, трудоемок и не позволяет определить место обрыва жилы без ее замыкания на оболочку.
Тема 5.3. Мосты переменного тока. Измерение параметров конденсаторов и катушек индуктивности.
Мосты переменного тока предназначены доля измерения емкости и угла потерь конденсаторов, индуктивности и добротности катушек, взаимной индуктивности. Схемы мостов могут иметь различные варианты включения в плечи измеряемых и образцовых резисторов, катушек индуктивностей и конденсаторов.
Для уравновешивания моста две его составляющие должны быть регулируемыми, чтобы обеспечить уравновешивание как по модулю, так и по фазе. Неизвестная катушка имеет собственную индуктивность LX, взаимную индуктивность MX и сопротивление RX. Далее представлены схемы мостов для измерения индуктивности методом сравнения с известной индуктивностью либо известной емкостью.
Измерение индуктивности LX с помощью моста показанного на рис. 5.4 состоит в сравнении с известной индуктивностью L1.

Рис. 5.4 Измерение индуктивности LX с помощью моста в сравнении с известной индуктивностью L1.
При уравновешивании моста можно регулировать R1 и L1 для достижения с RX и LX. Так как индуктивности имеют относительно большие собственные сопротивления, можно включить в схему резистор r и изменять его сопротивление в процессе уравновешивания, чтобы расширить диапазон измеряемых индуктивностей. При равновесии моста и определяются выражениями
Такой измеритель индуктивности используется сравнительно редко из-за трудности получения стабильных и точных образцовых индуктивностей.
В схеме моста, представленной на рис.5.5 его уравновешивание осуществляется с помощью резистора R2 и конденсатора C, при этом обеспечивается независимое уравновешивание LX и LX. Условия равновесия моста описываются выражениями
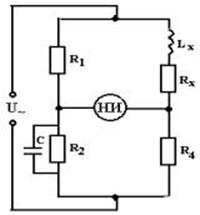
Рис. 5.5 Cхема моста, уравновешивание осуществляется с помощью резистора R2 и конденсатора C
Индуктивность измеряется с помощью емкостей высокого качества, которые значительно точнее и легче в изготовлении, чем образцовые индуктивности, и создают незначительное поле.
В мостах часто не указывается RX, а вместо этого дается значение добротности QX, которое определяется по формуле
Рассмотренный мост широко используется для измерения индуктивности катушек с добротностью Q ниже 10. Этот верхний предел добротности обусловлен тем, что при больших значениях Q резистор R2 должен иметь слишком большое сопротивление.
Для измерения индуктивности с высокой добротностью (Q>10) может использоваться мост, схема которого показана на рис. 5.6.

Рис. 5.6 Cхема моста, для измерения индуктивности с высокой добротностью
Условия равновесия данного моста определяются выражениями
Недостатком этого моста является то, что его равновесие зависит от частоты, но при Q > 10 в выражении для LX членом с Qx 2 можно пренебречь. В этом случае значение индуктивности не зависит от частоты и погрешность измерений составит менее 1%.
При измерении емкости конденсатора следует учесть, что он обычно обладает потерями. Реальный конденсатор представляется эквивалентной схемой в виде идеальной емкости, последовательно или параллельно соединенной с активным сопротивлением потерь. Шкалы приборов могут градуироваться в значениях тангенса угла диэлектрических потерь конденсатора (tgδ). Так как tgδ зависит от частоты, градуировка прибора действительна для одной частоты, а для других частот необходимо вводить поправку.
На рис. 5.7,а,б показаны схемы мостов для измерения емкости методом сравнения с мерой.



Рис. 5.7. a) для измерения емкости конденсатора с малым tgδ , б) Для измерения емкости с большим tgδ, в) для точного определения tgδ
Мост показанный на рис. 5.7,а используется для измерения емкости конденсатора с малыми потерями. Условия равновесия моста имеют вид
Емкость С3 - обычно образцовый конденсатор высокой точности, который не регулируется. Сопротивления R3 и R4 регулируются до уравновешивания моста.
Для измерения емкости с большим значением tgδ используется схема с параллельным включением (рис. 5.7,б), так как при последовательном включении сопротивление R3 должно быть большим. Равновесие моста определяется выражениями
Метод сравнения с мерой не очень точен при измерении емкости с малым тангенсом угла диэлектрических потерь.
Для измерения емкости и для точного определения tgδ может использоваться мост, схема которого показана на рис. 5.7, в. Условия равновесия описываются выражениями
В этой схеме С3 – образцовая емкость с малым tgδ, С4 и R4 регулируются до достижения равновесия.
Читайте также: